

王力宏的完美伴舞机器人,马斯克都点赞,这用慧视LLSM模块就能打造
描述
机器人的未来,灵活性的提升是下一个方向,这也是困扰宇树科技、特斯拉等中外机器人企业的一大难题。
机器人控制模块的发展直接决定着远程控制机器人进行工作时的延迟,进而展现出不同的灵活程度。灵活度越高,机器人越能够做出拟人的动作,也就越能够应用到更多的行业当中。
自春晚之后,宇树的机器人经过一年的发展,终于又迎来了惊艳亮相。
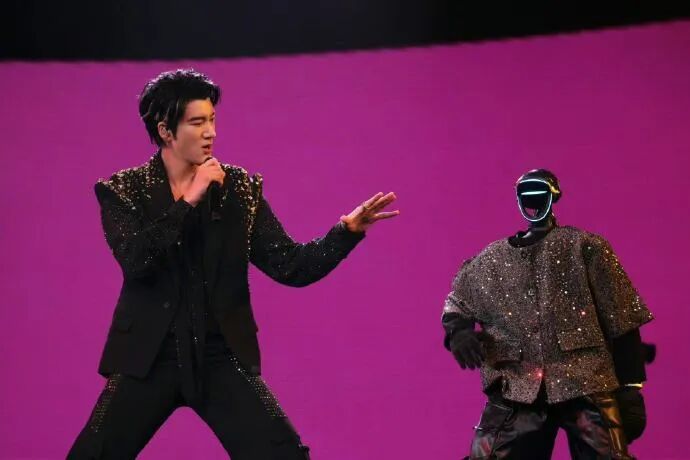
12月18日,在王力宏成都的演唱会中,宇树科技的人形机器人成为重要伴舞,表演最后的“韦伯斯特”空翻更是震惊世界。就连马斯克看到视频后也连连称赞说令人印象深刻。

表演中,6个人形机器人,跟随音乐节奏和真人伴舞一起,配合默契,共同演绎了一场视觉盛宴。这也是继春晚之后,宇树人形机器人的再一次舞台秀,不同的是,这一次,机器人的灵活性更高,动作更稳,像一个长了身体的“孩子”。
我们平常去看这种演唱会,你甚至不能及时发一张现场的图片给好友,网络会一直转圈,成千上万人聚集在一起,网络带宽本就不够用,而6个机器人能够同台演绎,这之中的低延迟、低带宽远程控制,宇树做得确实好。
不久之前,慧视就推出过类似的产品,来辅助保障无人设备的远程控制工作,这就是LLSM低延迟低带宽流媒体传输模块。
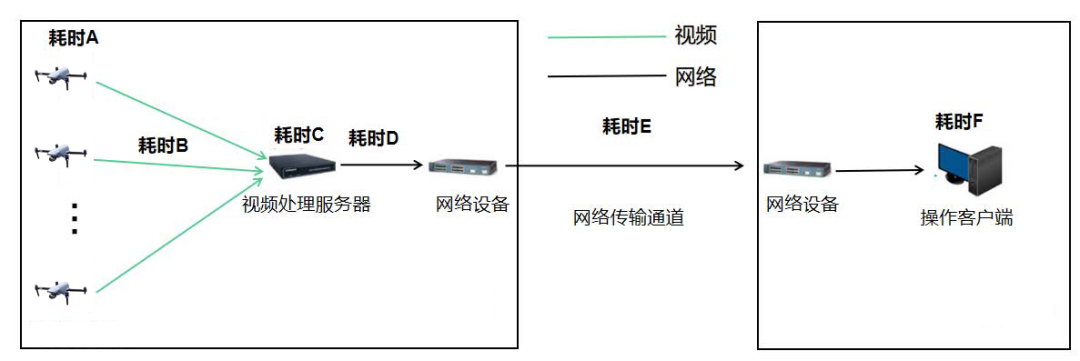
我司依托于瑞芯微RK3588s平台,将其集成于Viztra-HS063图像处理模块当中,这块板卡集视频采集、编解码等全流程功能,更精准攻克了行业长期面临的 “低带宽传输难、高延时拖慢响应” 两大核心痛点。能够实现在50ms左右低延迟环境,最低500K带宽占用下,控制多个无人设备进行远程作业。

以王力宏的演唱会为例,将模块集成到每个机器人身上,就能在幕后,通过一个终端,同时控制六个机器人跟随跳舞,其中控制端到机器人执行命令整个延迟在50ms左右(不含数据链),肉眼观感无差。
并且这种环境最主要的就是带宽的控制,即便是5G应用的当下,500K的带宽占用,直接决定着机器人的控制精度,也就决定了整个表演的流畅度和观感。其他像无人机、无人船、无人车等领域类似。
-
不完美的伴侣机器人?2015-12-28 6728
-
马斯克要借机器人助特斯拉超越现金之王苹果?2017-05-07 995
-
马斯克:人类已经是半机器人2023-06-13 2120
-
马斯克最新消息 马斯克重申特斯拉将取消实体后视镜 马斯克回应被指叛国2023-09-12 1947
-
多个传感器自研!刚刚,马斯克公布最强人形机器人Optimus二代2023-12-14 2966
-
马斯克展示机器人“擎天柱”叠衣服2024-01-16 1669
-
马斯克:AI发展速度前所未见 但马斯克起诉OpenAI及其创始人2024-03-02 2075
-
马斯克计划打造超级计算机推动AI发展2024-05-28 1242
-
马斯克承诺明年开始生产擎天柱机器人 马斯克宣布赢得薪酬方案投票2024-06-14 1264
-
马斯克称特斯拉明年将小规模生产人形机器人2024-07-23 1402
-
马斯克连线车主俱乐部聊Optimus人形机器人 从汽车到人体的学习2024-07-31 1918
-
机器视觉 欢创播报 马斯克展示机器人征服崎岖地形2024-12-12 1017
-
马斯克展望人形机器人与自动驾驶未来2025-01-10 1278
-
马斯克DOGE团队开发政府AI聊天机器人2025-02-10 1350
全部0条评论

快来发表一下你的评论吧 !
