

基于PTP,如何做好多传感器微秒级时间同步?
描述
▍
01 引言
自动驾驶车辆行驶过程中,多传感器(相机、激光雷达等)采集的带有精准同步时间戳的数据,是车辆实现高精度感知、定位、决策与规划的核心前提。正因如此,在自动驾驶数据采集系统中,传感器与主控单元之间通常会采用(g) PTP 协议,以保障多传感器的硬件时间同步。
然而和客户对接过程中,客户普遍反馈在实际开发过程中,要实现单个或多个传感器与主控平台的精准时间同步,往往会面临时间同步精度不足、多传感器时间戳不统一、系统部署流程复杂、数据质量难以管控等一系列问题。
康谋长期致力于多传感器数据采集方案开发,在解决客户问题的实践中,积累了应对上述时间同步问题的丰富经验。本文针对 PTP 时间同步协议在传感器与主控平台间的应用,分享相关的实践案例与技术经验,和大家一起讨论学习。
02 相机与工控机时间同步
PTP时间同步体系
以相机和工控机实现PTP时间同步部署为例,相机采集端口采集用以太网接口(支持PTP),工控机对应采用以太网接口(支持PTP),以此搭建基础的同步硬件链路。此外,激光雷达通常采用车载以太网(支持 (g) PTP 协议)完成时间同步,其实现思路与部署逻辑和本案例中的相机方案同理。

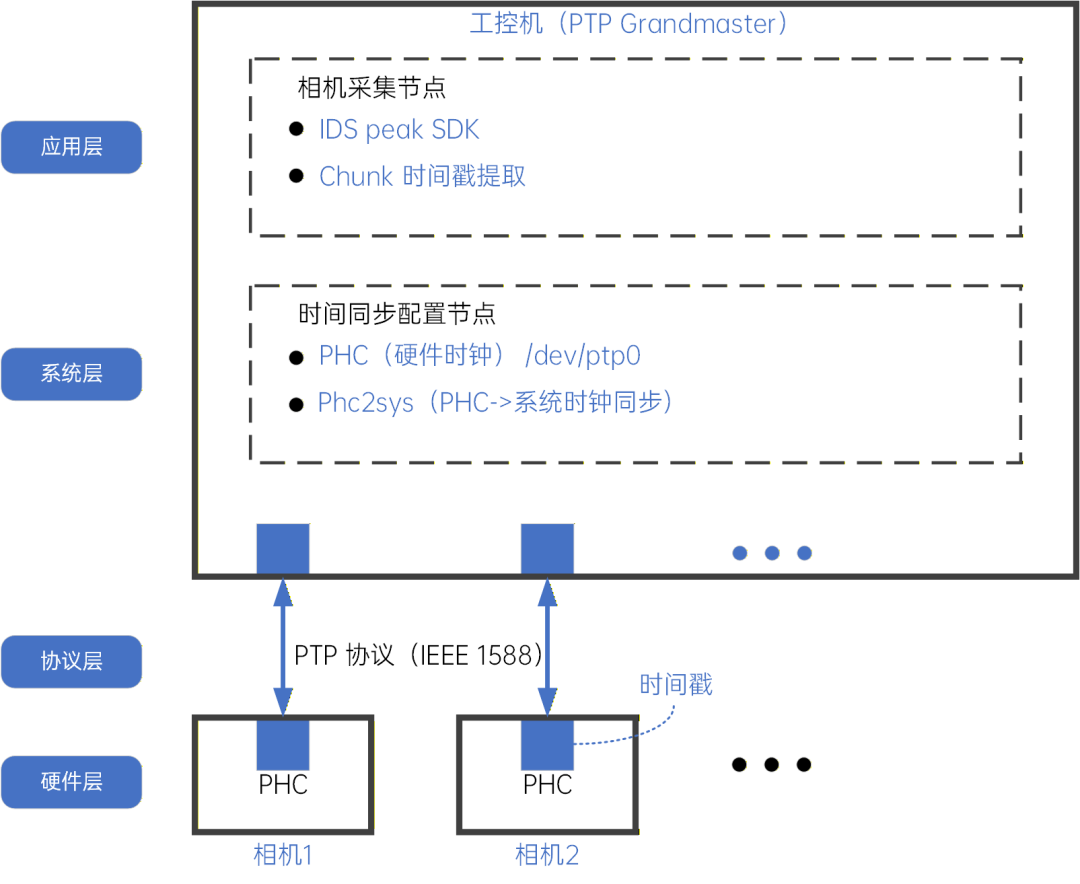
PTP时间同步可以简单划分为四层结构:
硬件层:依托网卡 PHC(Precision Hardware Clock)硬件时钟,在数据包收发的物理层 / 数据链路层边界直接打上时间戳。可规避软件协议栈的延迟干扰,为整个同步体系提供纳秒级的硬件时间基准。
协议层:基于 IEEE 1588 PTP 协议,通过 Sync/Follow-Up 和 Delay_Req/Delay_Resp 两组核心消息对实现主从同步。Sync/Follow-Up 消息传递主时钟精确时间,Delay_Req/Delay_Resp 消息测量链路往返延迟,最终计算主从时钟偏移量并完成从时钟校正。
系统层:采用phc2sys工具,将 PHC 硬件时钟时间同步至 Linux 系统时钟(CLOCK_REALTIME),确保系统时间与硬件时间的一致性,保障同步稳定性。
应用层:从图像缓冲区的 Chunk 数据中提取 PTP 硬件时间戳,时间戳以 int64_t 格式存储,保持纳秒级精度,并直接关联到每一帧图像数据。
多网口同步架构
在多相机场景中,每个网口需要运行一个独立的ptp4l实例。如果配置不当,多个实例会产生冲突,就像多个“Master”各自发布不同的时间标准。
针对这一问题,采用系统时钟中转同步架构,以 Linux 系统时钟为统一基准,借助phc2sys工具实现多网口 PHC(Precision Hardware Clock)的层级化同步,解决多实例冲突问题。
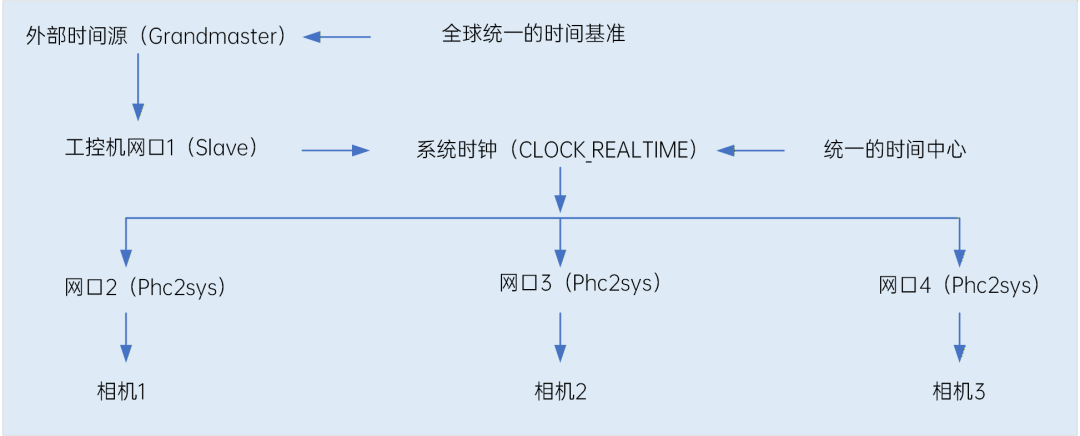
在实现过程中,将所有PHC都通过phc2sys同步到系统时钟,确保时间基准统一。每个网口的 ptp4l 实例仍基于自身绑定的 PHC 独立工作,负责对下游相机进行时间同步,由于各 PHC 已校准至同一系统时钟,多 ptp4l 实例的时间基准保持高度一致,从根源上消除冲突。此外,phc2sys 工具启用-w参数,自动获取 UTC 时间偏移量,无需手动配置,有效避免人工参数设置带来的同步偏差。
PTP状态监控
实现了完整的PTP状态监控机制,实时跟踪同步过程:
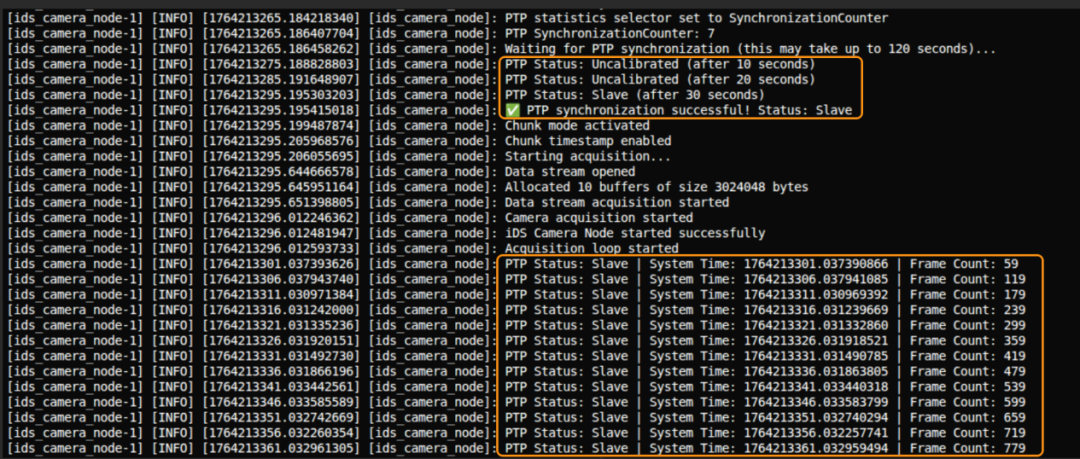
状态转换流程:Initializing → Uncalibrated → Listening → Slave;
状态监控频率:每10秒检查一次状态,提供实时反馈;
同步等待机制:可配置的同步超时时间(默认120秒),给相机足够的时间完成同步;
诊断信息输出:实时显示PTP时钟精度、父时钟ID、同步计数器等诊断信息。
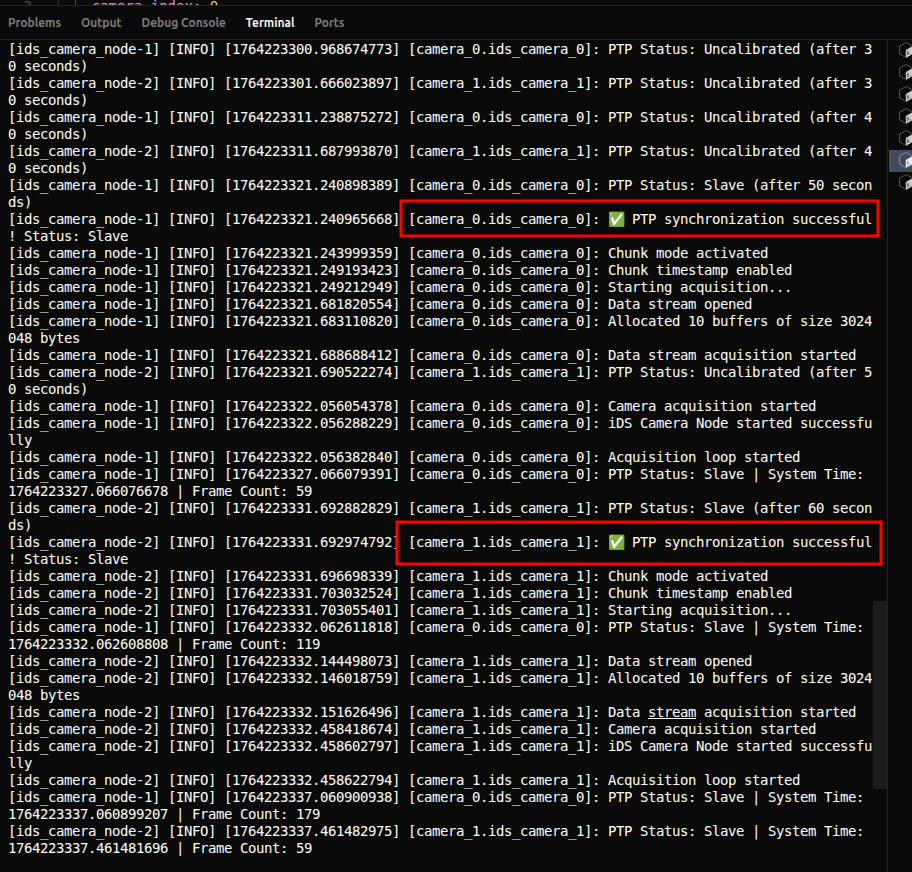
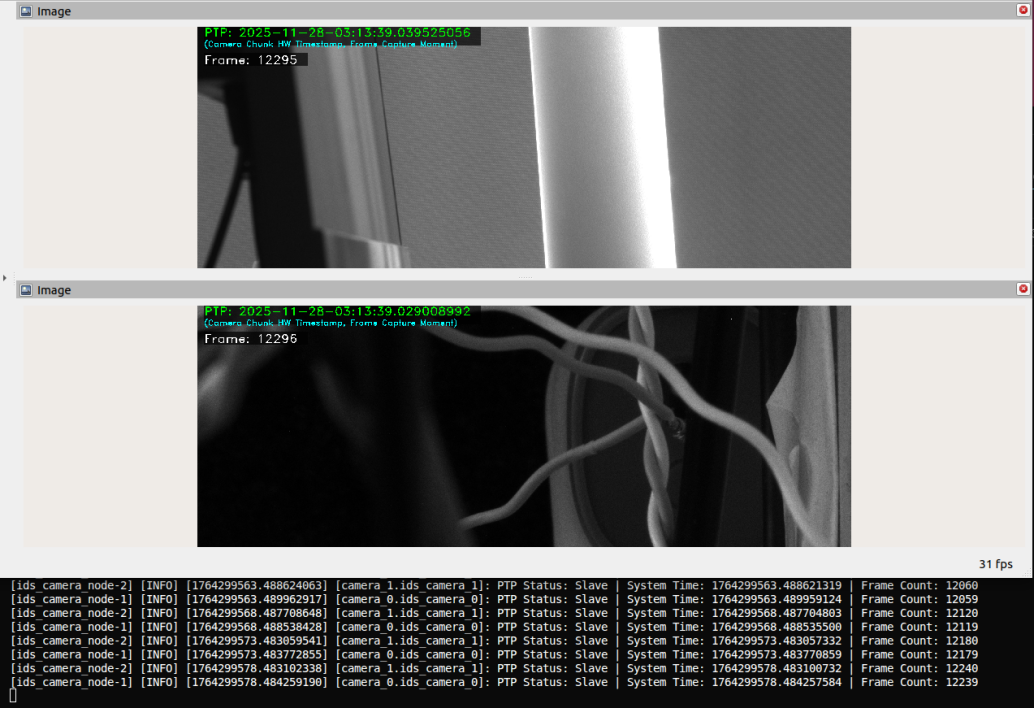
可视化验证
为了进一步呈现硬件时间同步效果,在测试过程中,我们将每帧时间戳叠加在该张图像上。采用多网口同步架构后,两个相机启动后,均能实现PTP硬件时间同步。随着时间增加Frame计数也会累加,可以看出,在累计1.2W+帧后,可以观察到PTP时间同步依旧稳定。
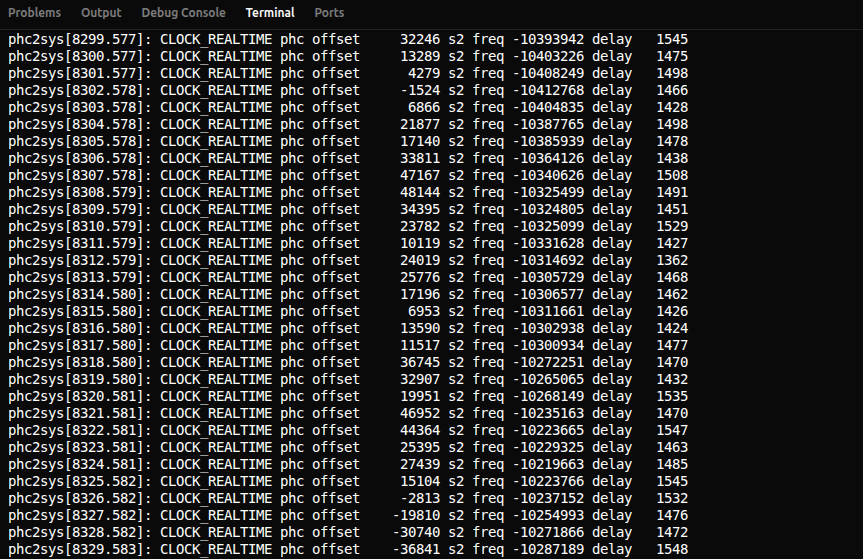
此外,影响时间同步精度另一个指标就是时间偏移量,即系统时钟(CLOCK_REALTIME)与 PHC 硬件时钟时间差。经过实践开发,可以看到offset(单位:ns)的最大值约为 48147 ns(≈48 μs),最小值约为 - 36840 ns(≈-37 μs),整体波动范围约为 85 μs(48 μs - (-37 μs)),偏移量的绝对值未超过 50 μs。一般系统时钟与 PHC 的偏移控制在百微秒内即满足多传感器同步需求,因此时间偏移量满足需求。
03 结语
这套基于PTP协议的自动驾驶多传感器时间同步方案,在实施过程中,依托多网口 PHC 时钟中转同步架构、phc2sys 工具校准、实时 PTP 状态监控及异常处理机制,实现了微秒级时间同步精度。
此外,通过 YAML 参数化配置、自动化部署脚本与完整文档体系,降低了技术门槛与部署难度,支持从单相机到多相机部署、对激光雷达等设备灵活扩展能力。
实践证明,该套方案能有效解决传统方案中,客户所面临的时间同步精度不足、多传感器时间戳不一致、系统部署复杂、数据质量不可控等核心痛点。此外,更可保障系统数小时连续稳定运行,提升数据采集效率与质量。
-
如何为时间同步网络选择合适的 PTP 配置文件2026-04-30 5249
-
高精度时间同步的IEEE1588 PTP授时服务器2026-02-10 531
-
PTP/GPTP主时钟服务器的应用 PTP时间服务器2025-11-12 1076
-
工业互联网时代:PTP时钟服务器如何实现微秒级精准同步?2025-08-21 1080
-
亚微秒级同步精度!光路科技PTP交换机助力工业升级2025-07-18 1020
-
PTP同步时钟使用注意事项及场景应用2025-06-12 1169
-
ptp时间同步技术的优势2024-12-29 1500
-
分享 | PTP、NTP时间同步服务器的部署与搭建过程2024-05-15 2452
-
如何实现更高精度的同步测量?如何做好同步数据采集的时间校准?2024-01-16 5397
-
无线传感器网络时间同步协议的实现2018-11-07 3621
-
无线传感器网络时间同步综述2010-05-28 787
全部0条评论

快来发表一下你的评论吧 !
