

德州仪器半导体技术助力自动驾驶的变革逻辑
描述
本文作者是 TI 汽车系统总监 Mark Ng。他以去年意大利雨夜的“压力驾驶”场景切入,用半导体技术视角拆解自动驾驶的变革逻辑。
文末的视频里,Mark 将跳出技术框架 —— 以个人视角分享生活热爱,畅谈 2026 CES 展会的趋势预判,以及他对驾驶体验重塑的更多思考。
去年夏天在意大利,我屏住呼吸,准备把车开上一条狭窄的鹅卵石小路。当时大雨倾盆,丝毫没有停歇的迹象,我的视线一片模糊。但我最终还是踩下了油门,双肩紧绷,双手紧握方向盘。
这只是压力驾驶的一个常见场景。无论是长途跋涉带来的疲惫,还是在拥堵不堪的车流中的缓慢挪移,驾驶常让许多人精神紧绷。尽管我们可能花费数周精心挑选一辆称心如意的座驾——斟酌哪款座椅坐起来最舒服,哪套音响系统的音质最醇厚,但一旦身处真实路况,当我们需要时刻留意潜在的行车隐患、应对变幻莫测的天气状况或在陌生的路段摸索着前行时,再惬意的驾驶体验也会大打折扣。
但如果能安心托付车辆自主应对压力驾驶,又能享受驾乘时光,岂不是两全其美?
我们正在稳步迈向这样的未来:预计到2028 年,全球对自动驾驶车辆的资本投入将增长逾7亿美元。然而,要真的理解未来的汽车,我们首先要了解汽车架构正在经历的深刻演变。
软件定义汽车 (SDV) 如何转变汽车架构?
要探讨未来车辆,必须从软件定义汽车 (SDV) 这一转变说起。由于集成了雷达、激光雷达和摄像头模块,SDV 正成为实现未来出行图景的关键:驾驶者无需每隔几年就换新车,同样能获得最新的自动驾驶功能。
对于汽车设计师而言,SDV 意味着软件开发需要独立于硬件,这会从根本上改变他们构建汽车的方式。随着汽车制造商将软件整合至更少的电子控制单元 (ECU) 时,既能提升车辆平台的可扩展性,又能简化远程在线升级的流程。这些 ECU 能够实时处理特定自动驾驶功能的控制,例如自动制动或自动转向模块。
集成传感器融合如何提高车辆的自主性?
随着 SDV 推动软件走向集中化,更先进的驾驶辅助系统技术得以整合,从而实现更高等级的车辆自主性。根据美国汽车工程师学会的驾驶自动化分级标准,当前道路上最为普遍的是1级或2级自动驾驶系统。在这一阶段,即使辅助功能已经启用,驾驶操作仍需由人类驾驶员主导完成。那么未来将如何演进?
我畅想未来的某一天,所有汽车都能具备成熟的 3 级或 4 级自动驾驶能力,即车辆可在特定场景下,依托自动驾驶功能自主完成行驶。眼下的技术演进将推动驾驶者像信任现在的巡航控制一样建立对未来汽车功能的信任。我们将不再需要独自承担驾驶的压力,而是放心让车辆系统承担主要驾驶任务。这场变革的核心,正是半导体技术。
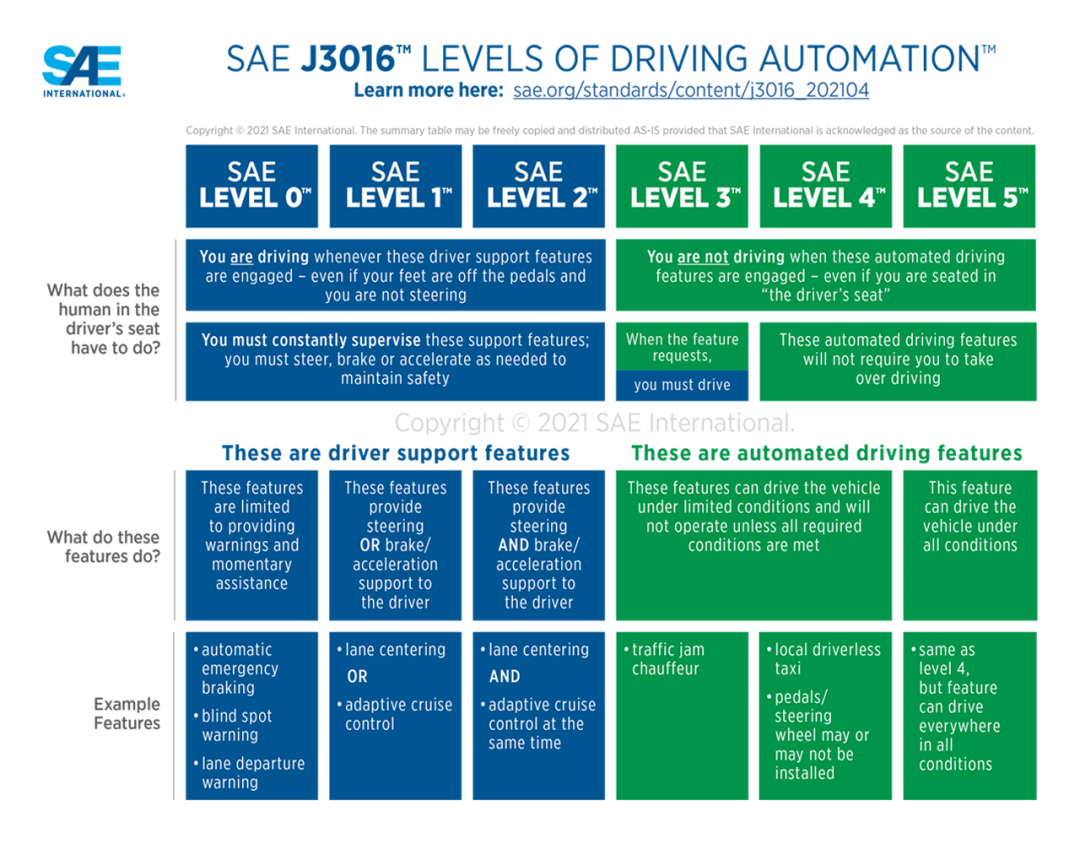
驾驶自动化级别(资料来源:SAE International)
要实现更高级别的车辆自主性,必须具备精准检测、分类物体并实时响应的能力,这依赖于更先进的传感技术。融合多传感器数据以全面感知车辆周围环境的技术,称为传感器融合。例如,如果雷达传感器将目标识别为树木时,另一种技术(如激光雷达或摄像头)可进行二次确认,然后告知驾驶者前方 15 米有一棵树,使驾驶者可以迅速采取行动。
为什么未来车辆需要基于以太网的高速数据作为支撑?
我想把未来的汽车比作“车轮上的”的数据中心,它们需要流畅处理大量高速数据。
车载计算机等元件覆盖全车的高速通信网络中,与雷达、音频和数据传输等其他功能相互协作。尽管控制器局域网 (CAN)和本地互联网络 (LIN) 等传统车载网络通信接口对于控制车门窗等基础车辆应用仍不可或缺,这类接口也必须实现与新兴技术的无缝集成。为了满足新一代汽车更高的数据处理需求,以太网将成为主力技术。如今,汽车以太网正逐渐扮演起“数字支柱”的角色,可高效满足从音频到标准雷达等应用的需求。
随着汽车自主性的提高,设计人员需要更高带宽的网络来承载高分辨率视频和流式雷达等应用。
TI 通过多样化的产品组合,支持多样功能的不同需求,让我们从容面对未来汽车网络的演进。
借助 FPD-Link 等技术,车辆可以将未经压缩的高带宽雷达、摄像头和激光雷达数据流式传输至中央处理系统,以确保实时响应各种事件。
设计工程师还需为中央计算系统配备高性能处理器,以整合激光雷达、摄像头及雷达传感器等多类技术采集的数据,完成高速实时分析,并输出 4D 数据解析结果,从而实现更精准的目标分类。
凭借在雷达、以太网、FPD-Link 技术和中央计算等领域深厚的专业知识,TI 与工程师紧密协作,一起助力优化端到端解决方案。我们不仅开发单一功能器件,更着眼于如何全面优化我们的器件生态系统。例如,我们设计的雷达器件能够与 Jacinto 处理器顺畅连接,以实现更快速、更准确的决策。
这些进步对于未来的驾驶体验意味着什么?
如若未来在意大利再次遭遇今夏雨中的那种路况我可能会选择安心乘坐。我相信我的车将待我我安全抵达目的地,而我只需要在座椅上放松。
虽然未来的汽车可能暂时还未问世,但我们目前开发的技术正一步步让未来汽车——甚至未来出行的下一场突破——成为现实。
展望未来
自动驾驶将走向何方
自动驾驶的技术突破,背后往往是工程师多年积累的选择与坚持。在上文中,Mark Ng 从技术与架构的角度,分享了他对自动驾驶未来的思考。
接下来的视频里,我们将跟随他的个人视角,看他眼中未来驾驶体验的重塑,也看这位“行业瞭望者”生活里的热爱,以及他对 2026 CES 展会的期待。
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 4668
-
德州仪器半导体制造(成都)有限公司招聘(EE Mgr, EE,PIE)2012-04-22 5092
-
自动驾驶的到来2017-06-08 7305
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 7358
-
高级安全驾驶员辅助系统助力自动驾驶2018-09-14 3347
-
安森美半导体与奥迪携手建立战略合作关系2018-10-11 2962
-
自动驾驶零排放汽车让世界更加绿色2019-03-11 2956
-
Imagination全新BXS GPU助力德州仪器汽车处理器系列产品介绍2020-12-16 1968
-
自动驾驶技术的实现2021-09-03 3076
-
德州仪器人为半导体库存处在合理水平2006-06-01 698
-
德州仪器正式完成收购美国国家半导体2011-09-26 1300
-
德州仪器(TI)2011-12-12 2481
-
德州仪器公司(TI)逻辑产品选择指南2022-07-08 657
-
目前半导体市场冷清吗?德州仪器TI建厂计划延迟2019-07-20 5233
-
德州仪器、意法半导体发布悲观指引2024-01-29 1277
全部0条评论

快来发表一下你的评论吧 !
