

西湖大学:研发CMOS兼容压力传感器阵列,实现精准触觉感知功能
电子说
描述
人类指尖分布着高密度的触觉感受器使得人类能够精确感知物体的纹理、大小和形状等触觉信息。近年来,人工电子皮肤(触觉传感器阵列)在机器人领域得到了广泛应用。例如,在Optimus-Gen 2等机器人的灵巧手上集成高密度触觉传感器,可赋予机器人精细操作能力。
目前,触觉传感技术领域存在多种技术实现路径,其中视触觉传感技术是目前商业化高密度传感器的主流技术路径之一。然而,现有的视触觉传感器虽然实现了较高的传感器密度,但仍存在两个主要局限性:一是测量误差较大,由于依赖间接光学测量,光学畸变、光照变化和机械滞后等因素会导致压力测量不准确,并且对微弱压力响应不敏感;二是系统体积庞大,需要光学组件、照明系统和保护外壳等部件,使得小型化难以实现,从而限制了集成密度的进一步提升。
针对上述技术挑战,西湖大学工学院朱博文团队与合作者提出了一种创新的直接触觉感知方案。与依赖间接光学测量的视触觉传感器不同,该方案通过CMOS技术与电阻式压敏薄膜的集成,实现了接触力的直接电学转换,从而显著提升了力校准精度和微弱压力响应灵敏度。
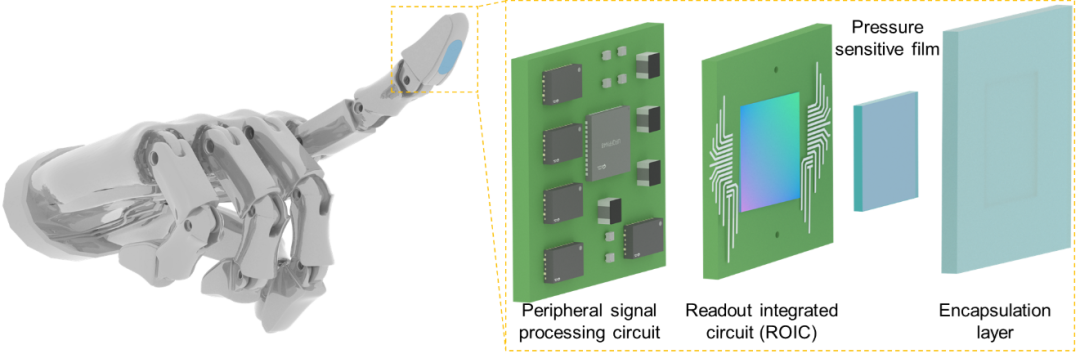
图1 高密度触觉传感器示意图
该压力敏感薄膜由三维共形涂覆的碳纳米管(CNT)网络、多尺度结构的PDMS基底,以及用于增强局部导电性的金(Au)薄膜三部分构成。这种多尺度结构设计不仅显著提升了压力传感器的灵敏度,还增强了导电层与基底的界面稳定性。
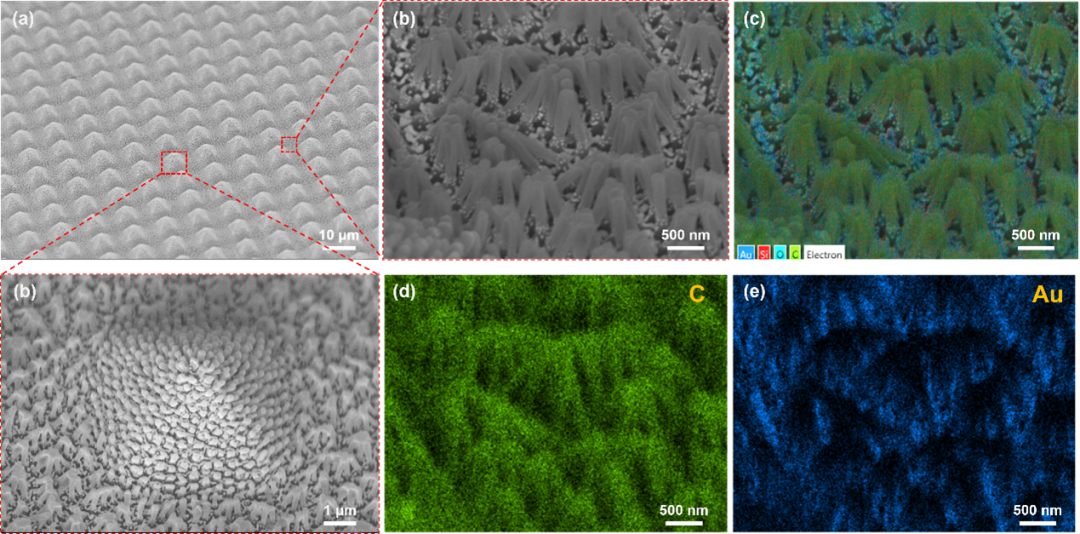
图2 压力传感器的多尺度结构设计
该传感器阵列在分辨率和灵敏度方面表现卓越,能够检测和区分29.8 mg和34.5 mg的微小重量,展现出优异的弱压力检测能力。在动态响应特性方面,传感器的响应时间和恢复时间分别为21 ms和20 ms,能够满足实时触觉感知应用的需求。
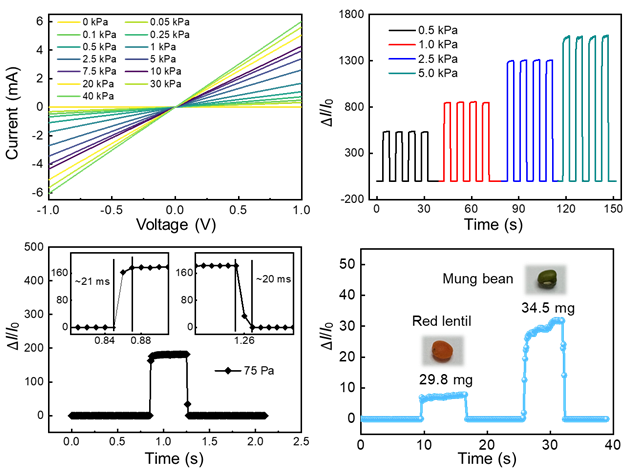
图3 基于跨尺度结构的触觉传感器性能
研究团队成功将传感器阵列集成到机械灵巧手指尖,实现了高集成度的触觉感知系统。在实时成像应用中,成功实现了字母"W"等复杂图案的高保真度触觉成像,15微米的像素尺寸能够清晰呈现触觉接触的细节特征,展现了传感器阵列的精细成像能力。
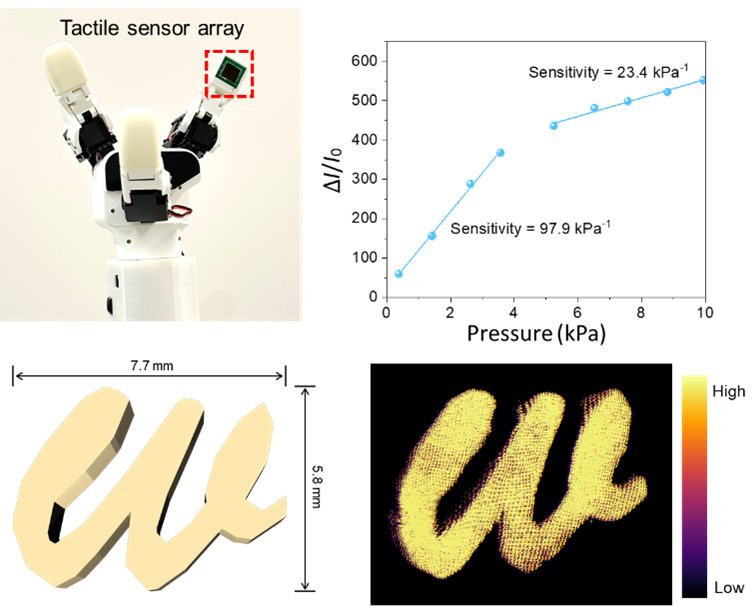
图4 具有高集成度的灵巧手指尖触觉成像展示
在动态力方向检测应用中,研究团队基于光流算法实现了实时力方向检测功能,能够准确追踪手指在传感器表面的滑动轨迹,并实时分析力的方向分布。该系统通过HSV(Hue-Saturation-Value)颜色空间编码可视化力方向,为机器人动态触觉感知提供了重要技术支撑。
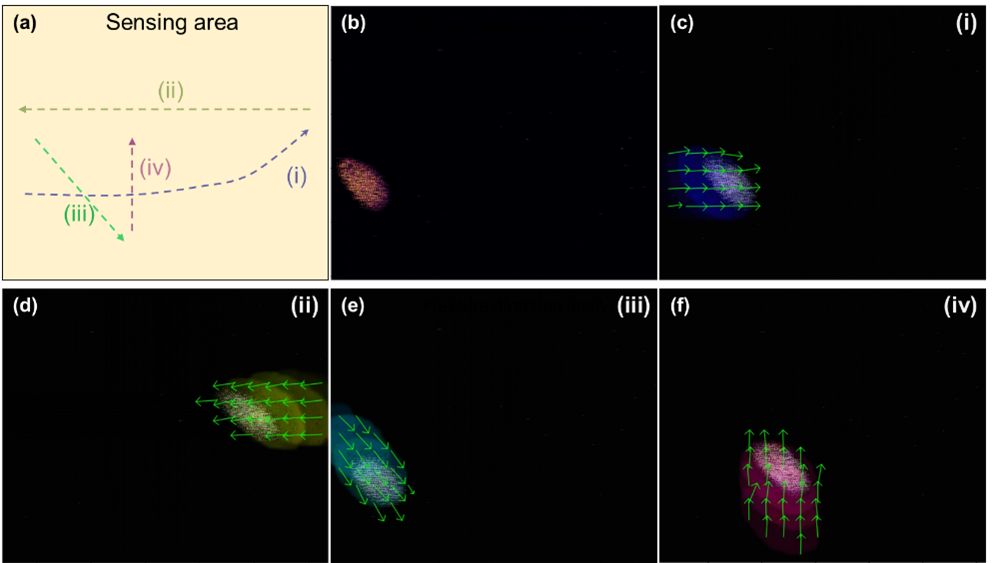
图5 实时压力方向分析
在物体精细纹理识别应用中,研究团队采用16种不同的"W"字形进行训练,从8个不同角度(45度间隔,0-360度)采集了3706个触觉图像样本。基于卷积神经网络(CNN)的分类系统在仅2个训练周期内即达到100%的准确率,实时识别速度达到13.1 ms,展现了传感器在机器人精细触觉分类应用中的巨大潜力。

图6 触觉传感阵列的物体精细纹理识别应用
由于该传感器阵列具有良好的集成特性和优异的性能表现,未来有望在智能假肢、人机交互、机器人精细操作等领域得到广泛应用。
审核编辑 黄宇
-
绝压真空压力传感器,气体压力传感器2014-05-07 5598
-
薄膜压力传感器-医疗的先驱,让假肢活了2016-05-23 2759
-
压力传感器应用实例详解2018-11-07 4284
-
兼容液体介质的压力传感器改善了医疗设备的设计2020-08-26 2747
-
兼容液体介质的压力传感器改善医疗设备设计方案2020-08-27 2588
-
兼容液体介质的压力传感器的优势2020-08-28 3074
-
如何去实现压力传感器无线采集系统的设计?2021-06-01 2189
-
压力传感器,压力传感器是什么意思2010-03-03 6425
-
什么是压力传感器2010-04-01 1821
-
压力传感器测试方法_压力传感器的测量原理_压力传感器种类2018-01-22 36137
-
智能压力传感器的基本功能2020-06-24 2400
-
压力传感器的分类 各种压力传感器的原理2023-01-16 7077
-
压力传感器的原理及应用2023-06-18 13043
-
压力传感器的功能及应用2023-07-31 5341
-
安徽工程大学、西湖大学:仿生触觉传感器新突破,实现高精度跨域目标识别2026-04-28 4201
全部0条评论

快来发表一下你的评论吧 !
