

澳门大学,东北大学:受葫芦启发的单元结构设计,具有多重梯度,用于生理压力范围内的压力传感
电子说
描述
柔性可穿戴压力传感器作为一类快速发展的器件,因其在电子皮肤(E-skin)、个性化医疗和智能机器人等领域的广泛应用潜力,引起了学术界和工业界的广泛关注,预示着新一代人机交互(HMI)的到来。在众多关键性能指标中,灵敏度和线性度尤为重要,但如何同时提升这两项指标仍然是实现精确生理监测和稳定输出(可穿戴HMI所需)的核心挑战。迄今为止,人们已投入大量精力来研发先进材料和微结构,以期兼顾这两项指标。例如,Cheng等人报道了一种可编程微结构策略,该策略与超薄离子层相结合,制备出具有超高灵敏度和兆帕级线性范围的电容式传感器,非常适合用于极端负载监测。在实际可穿戴人机交互(HMI)和以人体为中心的传感场景中,压力输入本质上源于生理活动,例如皮肤接触、肌肉收缩、关节运动和步态,且大多处于低于 200 kPa 的实用范围内。因此,“生理范围压力”指的是典型人体生理活动期间产生的压力水平,其范围从脉搏和呼吸等细微信号的几十帕斯卡到剧烈运动时关节负荷和足底压力的几百千帕斯卡。因此,对于可靠的、定量的可穿戴界面而言,能够同时转换微弱生命体征和大幅度运动状态的压力传感器至关重要。这些压力传感器需要在低压范围内提供超高灵敏度,同时在高压下保持稳定、近似线性的响应和足够的灵敏度。
基于压阻式、电容式、压电式、摩擦电式、电化学式和离子梯度驱动机制的柔性可穿戴压力传感器已被广泛研究,这些机制共同为自供电运行、宽压力范围和在电子皮肤和人机界面中的共形集成提供了广阔的设计空间。自供电压电式和摩擦电式压力传感器无需外部电源即可将机械刺激直接转换为电信号,从而实现在可穿戴和植入式系统中实现本质上的自供电运行。由于其直接的机械-电能转换以及能够收集环境机械能以同时进行发电和压力传感,这些器件受到了广泛的研究。电化学和基于离子梯度的压力传感器为高灵敏度检测微小压力变化提供了一个多功能平台,这得益于离子传输和界面电荷调制,这对于生物相关应用和柔性电子产品尤其具有吸引力。然而,这些自供电和基于电化学/离子梯度的传感器的实际应用通常需要相对复杂的信号调节电路和精密的器件封装,以解决阻抗匹配、环境敏感性和长期稳定性等问题。在这些不同的平台中,压阻式压力传感器尤其具有吸引力,因为它们天然地结合了高灵敏度、简单的器件结构、低成本和稳健的运行稳定性,这对于可靠地监测微弱的生理信号以及长期的人机界面应用至关重要。然而,当传感器设计基于单个参数而不是协同优化关键要素(例如电导率、机械模量或微观结构)时,在超宽压力范围内实现高灵敏度和线性响应仍然具有挑战性。柔性压阻式传感器的工作原理在于调节导电通路,例如在受到外部压力时调节接触电阻或隧道电阻。特别是,合理设计电导率、模量和几何形状的垂直或平面梯度,为精确控制压力下导电通路的演变提供了一条有效途径,从而在超宽检测范围内协同提高灵敏度和线性度。例如,Zhang 等人报道了一种基于纸张的压阻式传感器,该传感器采用双面导电结构,包含双层纤维素纳米纤维/碳纳米管(CNT)敏感层,实现了0-3800 kPa的超宽检测范围和4.11 kPa⁻¹的灵敏度,非常适合精确的健康监测和步态分析。这种单参数电导率梯度确实可以拓宽线性范围;然而,由于难以同时引入接触构型和/或机械模量的梯度,初始电流仍然相对较大,使得进一步提高灵敏度变得困难。此外,通过将导电填料涂覆或嵌入弹性基底中,并进一步集成微工程结构,例如微金字塔、微柱、微圆顶阵列(MDA)或微纤毛阵列,可以在传感层内建立有效的模量梯度,从而协同增强线性和灵敏度。然而,这种基于模量梯度的设计通常依赖于在高应变下工作的高纵横比微结构,因此软区域在高压下会迅速被完全压缩,导致响应饱和,并限制了在高压范围内的性能提升。因此,仅调节电导率、模量或几何形状不足以显著提高器件的整体性能。为了解决这些局限性,人们探索了激光图案化和多层梯度结构等先进策略来提高灵敏度和线性度,但这些方法不可避免地增加了制造复杂性和成本,因为它们需要额外的加工步骤和专用设备。与此同时,近年来,将碳纳米管(CNT)掺入聚二甲基硅氧烷(PDMS)中,并结合微结构的复制成型,已成为一种重要的策略,也是大规模制造柔性压阻传感器的可扩展途径,并且可以通过改变碳纳米管的含量轻松调节复合材料的电导率。因此,在单个模板中实现模量、电导率和几何形状的同时调制,从而协同优化线性和灵敏度,是实现低成本、可扩展制造高性能压力传感器的关键一步。
长期以来,大自然一直是取之不尽的灵感源泉。通过利用或模仿生物系统中已有的结构基序,研究人员能够设计出集成多种功能并显著提升柔性压力传感器性能的改进方案。近年来,将受树叶或花瓣启发的非传统微结构基序与以人体皮肤为例的梯度调节原理相结合,已成为提高传感器性能的有效策略。因此,利用自然界独特的结构特征并将其与既有的设计原理相结合,为优化柔性压力传感器的性能提供了一条强有力的途径。葫芦状结构具有固有的结构优势,因为它由两个尺寸不同的圆顶部分组成。目前,模仿这种几何形状的研究主要集中在光纤传感领域,例如使用熔融拉锥等技术将圆柱形光纤重塑成葫芦状轮廓以提高灵敏度。在电学领域,特别是在可穿戴压阻器件中,葫芦状结构的潜力尚未得到充分探索。因此,人们越来越关注对葫芦状结构的仿生研究,其中对几何尺寸、机械模量和电导率的同步调节被认为是实现灵敏度和线性度在实际压力范围内协同提升的有效途径。
本文亮点
1. 本工作展示了如何利用葫芦形微圆顶阵列(GSDA)实现灵敏度和线性度的协同优化,该阵列在单个单元内集成了三个协同梯度(模量、电导率和几何形状)。
2. 该单元由一个导电率较低的实心上圆顶(直径较小)和一个导电率较高的多孔下圆顶(直径较大)组成。在机械加载下,较大的模量对比度驱动上圆顶嵌入多孔层,从而快速增大实际接触面积并缩短电隧道间隙。
3. 上微圆顶(MD)的嵌入过程会产生串联到并联的电学转变,从而抑制早期信号饱和。优化后的器件在高达 210 kPa 的压力下仍保持线性响应,灵敏度为 534.9 kPa⁻¹。
4. 通过建立一致的强度映射,我们表明 GSDA 可以作为传感单元或阵列组件,应用于各种领域,例如触觉监测、密码编码、莫尔斯电码、机器人控制和有效的手语识别。
图文解析
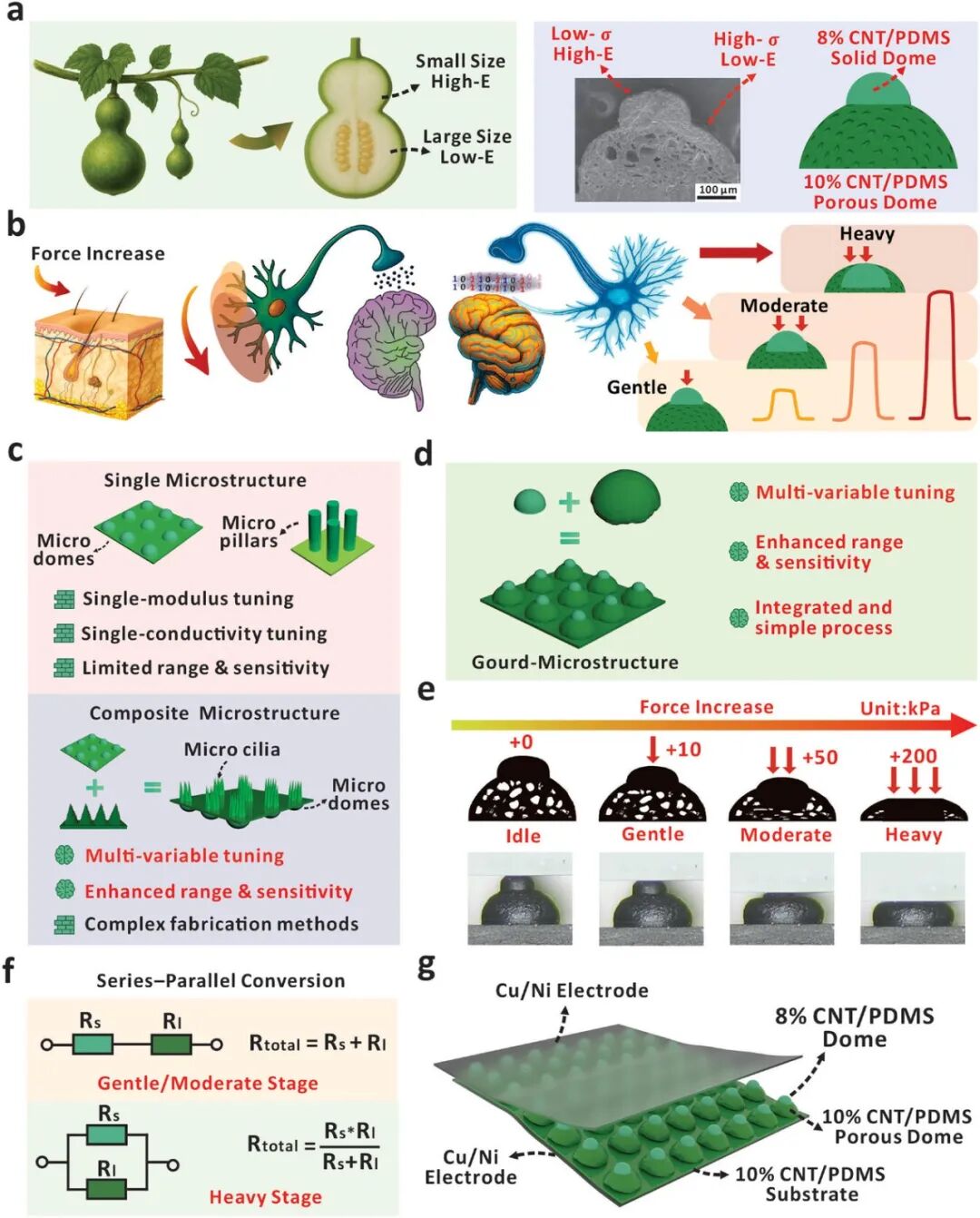
图1. (a) 葫芦形结构的示意图,其上部为小尺寸、高模量部分,下部为大尺寸、低模量部分。扫描电子显微镜图像显示了具有不同材料特性的8% CNT/PDMS固体和10% CNT/PDMS多孔圆顶。“E”代表模量,“σ”代表电导率。(b) 压力传感器在力增加时的响应示意图,显示随着压力的增加,更多神经元被逐渐激活。(c) 单一微结构和复合微结构的比较。(d) 突出显示GSDA的优势,其上部为小尺寸、高模量部分,下部为大尺寸、低模量部分。(e) 显示传感器在不同力(+0、+10、+50、+200 kPa)作用下从静止状态到重度压缩状态的变形图像。(f) 在轻度、中度和重度力作用阶段发生的串并联转换机制的示意图。电阻(Rs和Rl)组合形成总电阻(Rtotal),该电阻随施加到传感器上的力而变化。(g) 利用GSDA和两个柔性电极的传感器装置示意图。
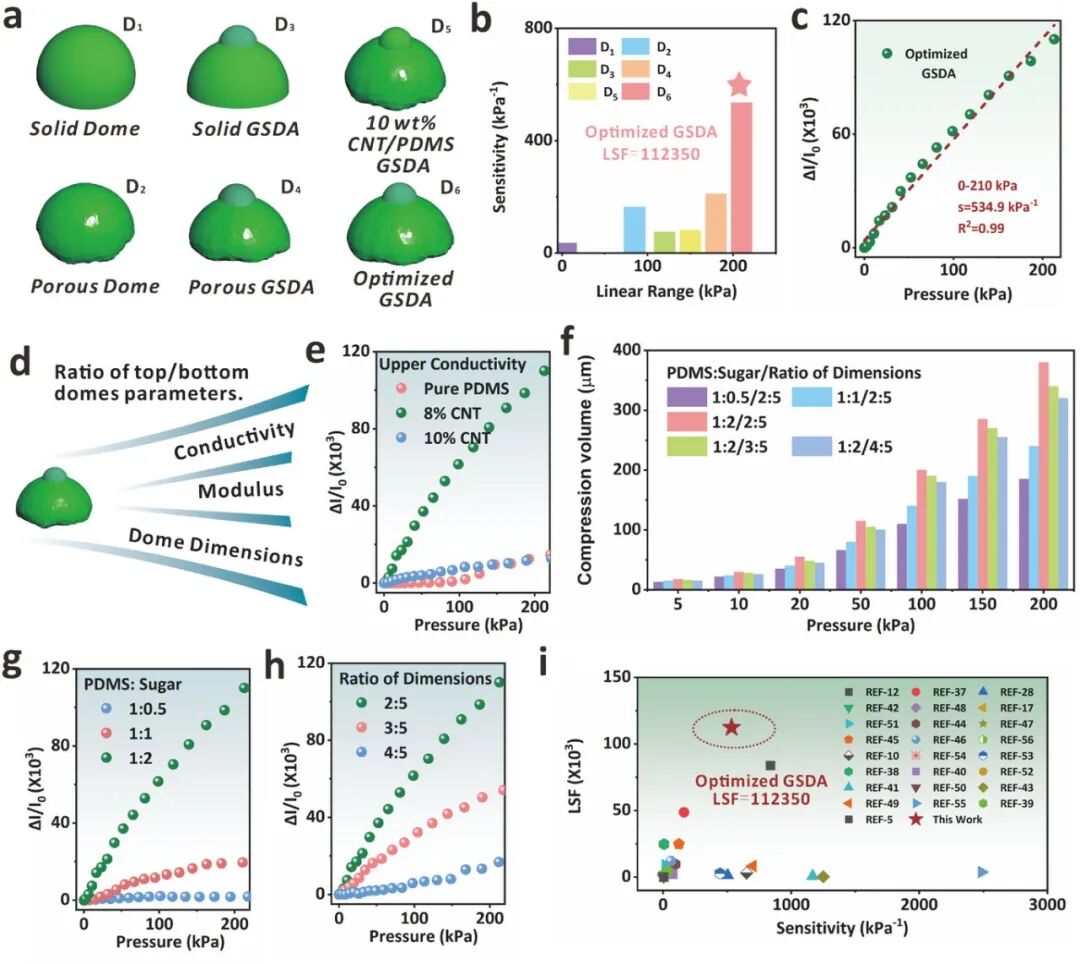
图2. (a) 不同微结构的示意图比较,包括固体圆顶、多孔圆顶和GSDA。(b) 比较不同结构的灵敏度和线性范围的柱状图,突出显示优化后的GSDA传感器具有最高的综合性能(LSF = 112350)。(c) 归一化电流变化(ΔI/I0)与压力的关系图,显示在高达210 kPa的压力范围内具有出色的线性度,灵敏度为534.9 kPa⁻¹,R² = 0.99。(d) GSDA中可调设计变量的示意图,包括上部和下部圆顶的电导率、模量和尺寸。(e) 上部圆顶电导率对压力响应的影响。(f) 不同PDMS:糖比例和圆顶尺寸比例下的压缩体积比较。(g) 不同PDMS:糖比例下的ΔI/I0与压力的关系图,显示更高的孔隙率由于增强的可压缩性而导致压力灵敏度提高。(h) 不同顶部/底部圆顶尺寸比例下的ΔI/I0与压力的关系图。 (i) 对近期研究中基于MCA的代表性压力传感器在0-200 kPa压力范围内的灵敏度进行比较,突出显示优化后的GSDA在该实际压力范围内的领先性能。
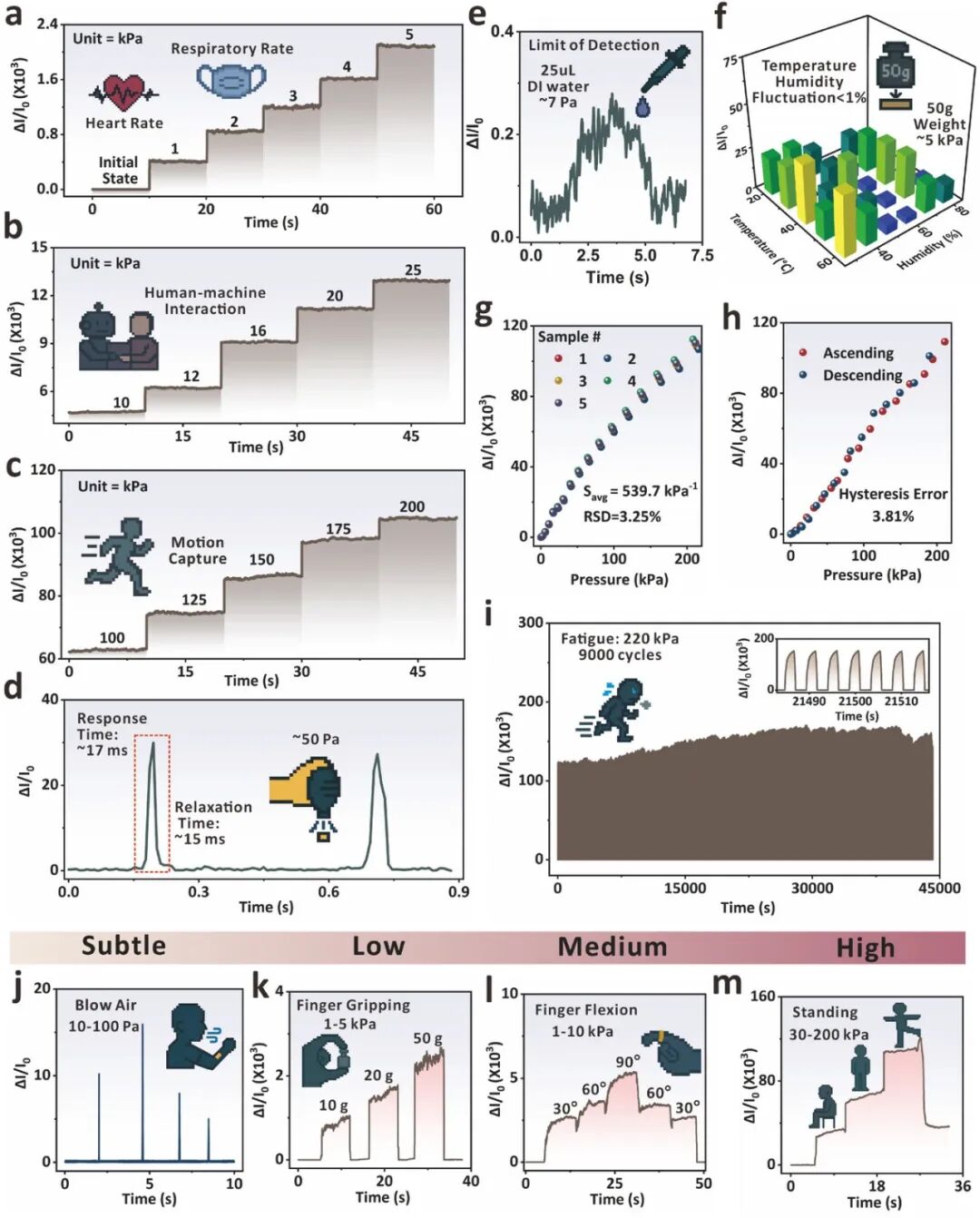
图3. (a) 在1至5 kPa低压范围内进行阶梯式加载传感。 (b) 在10至25 kPa中压范围内进行阶梯式加载传感。 (c) 在100至200 kPa高压范围内进行阶梯式加载传感。 (d) 在50 Pa脉冲下的代表性曲线显示响应时间为17 ms,弛豫时间为15 ms。 (e) 对25 µL去离子水液滴进行传感,对应压力约为7 Pa。 (f) 环境鲁棒性。在20至60°C温度、20–80%相对湿度和50 g(5 kPa)静态载荷下,ΔI/I0的漂移极小(<1%)。 (g) 五个独立样品在0-200 kPa范围内表现出高度重叠的ΔI/I0-压力曲线,平均灵敏度为539.7 kPa⁻¹,相对标准偏差为3.25%。 (h) 升压和降压扫描的滞后误差为3.81%。 (i) 在220 kPa压力下进行9000次循环的长期疲劳测试。 (j) 短暂的气流脉冲会在归一化电流变化中产生尖锐的高信噪比峰值,表明其对微小压力刺激的敏感性,并且每个脉冲后基线稳定且快速恢复。 (k) 随着握力的增加以及添加10、20和50 g的重量,观察到ΔI/I0呈现分级平台。 (l) ΔI/I0随关节角度(30°、60°、90°)单调上升,并在释放后恢复。 (m) 踩踏/抬起动作在宽压力范围内产生线性阶梯式ΔI/I0响应。
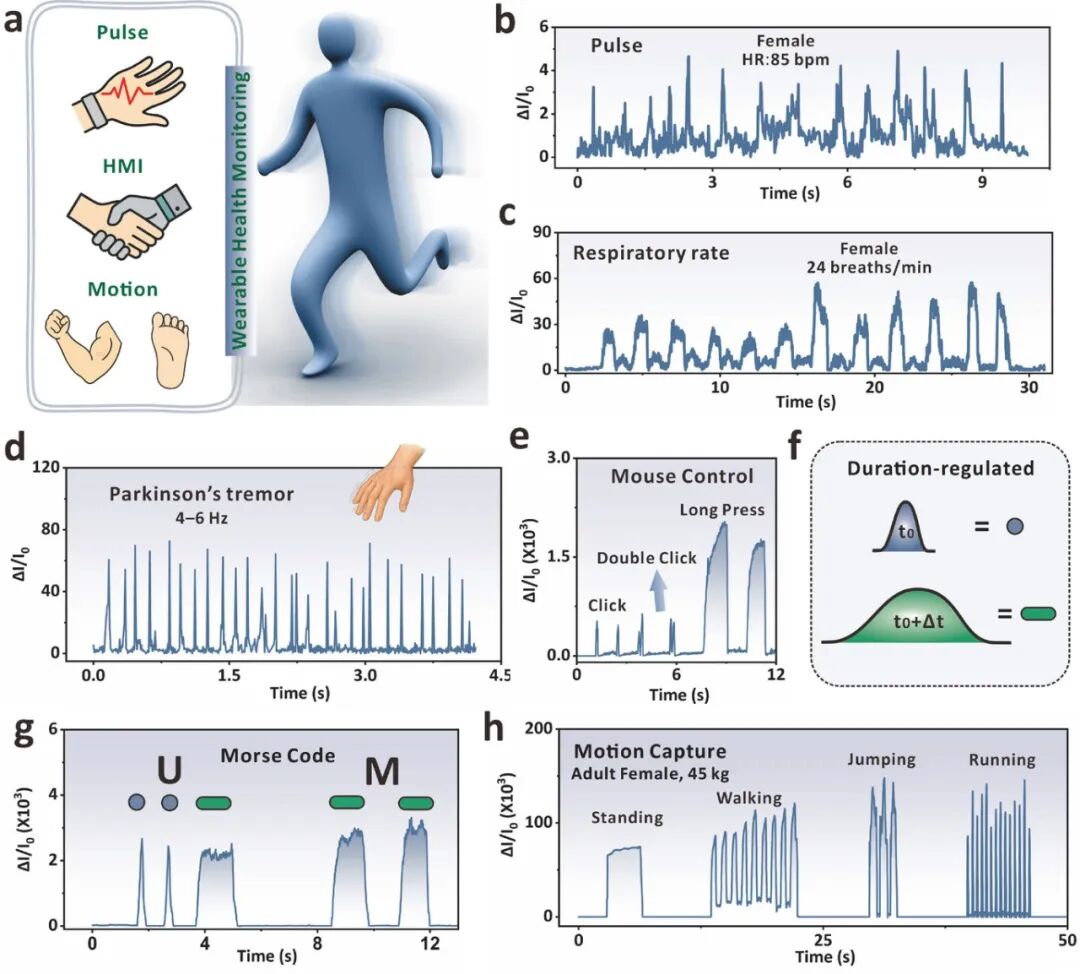
图4. 在可穿戴传感领域的潜在应用。(a) 应用概述展示了 GSDAs 压阻器件的典型用途,包括脉搏监测、人机交互和运动追踪。(b) 脉搏监测显示成年女性(约 85 次/分钟)的逐搏归一化电流变化 (ΔI/I0),证明了对微弱生理压力的稳定检测。(c) 呼吸监测显示 ΔI/I0 周期约为 24 次/分钟,基线稳定,验证了对缓慢低压信号的可靠追踪。(d) 帕金森氏症震颤检测显示 4-6 Hz 的震颤表现为一系列窄的 ΔI/I0 尖峰,表明对病理性运动具有高时间保真度。(e) 鼠标控制显示单击、双击和长按手势在 ΔI/I0 中产生可区分的时间特征。(f) 持续时间调节编码(示意图)显示短按 (t0) 和长按 (t0+Δt) 作为点划指令的时间域分隔符。(g) 摩尔斯电码演示显示使用短按/长按重构“U”和“M”。(h) 运动追踪显示站立、行走、跳跃和跑步在宽压力范围内具有可重复的波形。
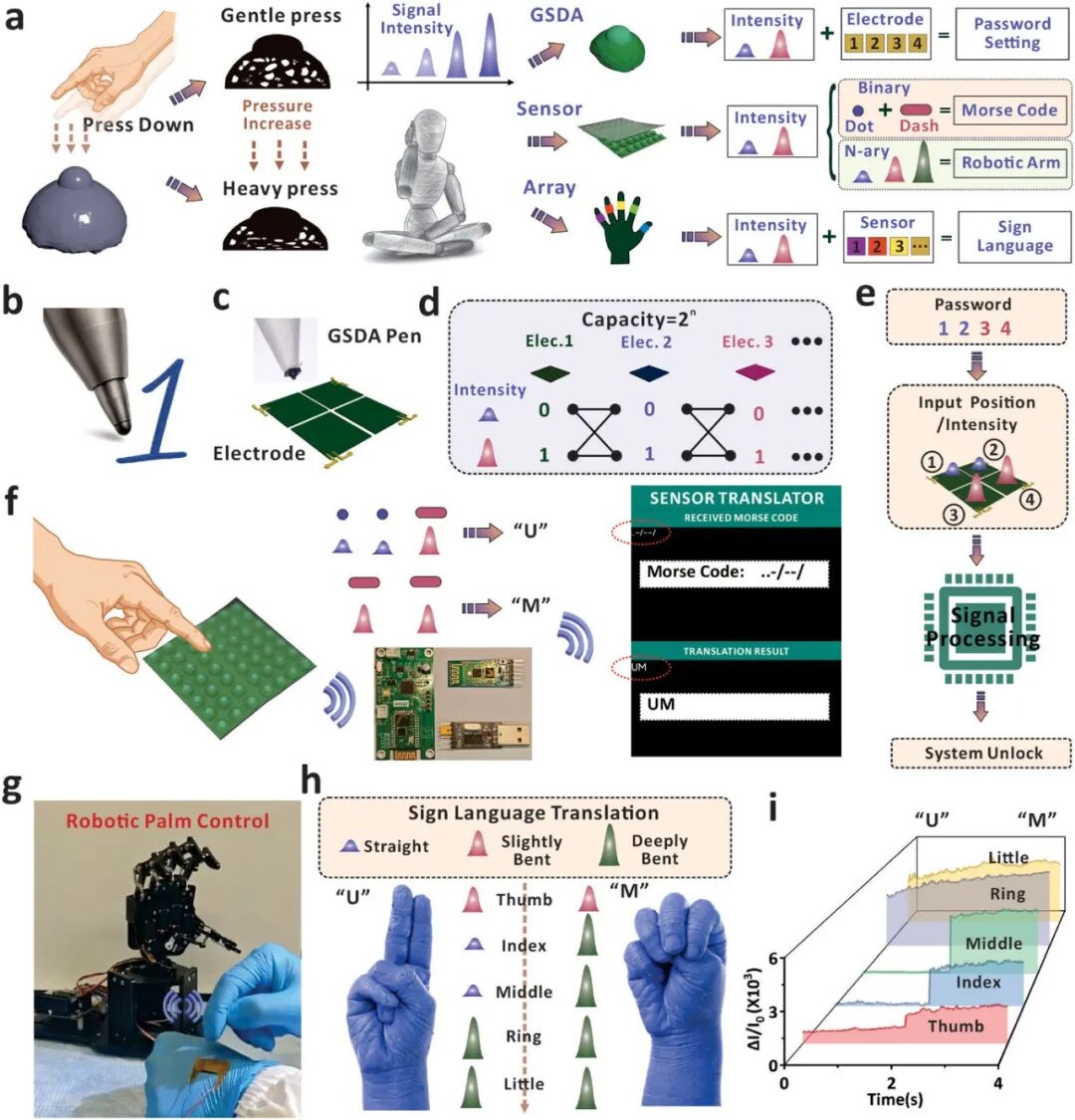
图5. (a) 人机交互概述。从轻到重的按压对应于逐渐增大的输出幅度。(b) 圆珠笔书写机制示意图。(c) 类似于圆珠笔尖,固体上层 MD 在压力下嵌入多孔下层 MD,快速增加实际接触面积和并联导电通路数量,从而使 ΔI/I0 逐步上升。(d) 强度和位置的联合编码。分级按压级别与电极索引相结合形成二维阵列,编码容量随电极数量 n 以 2n 的速度增长。(e) 密码解锁显示通过信号处理流程结合输入位置和强度来验证预设代码“1-2-3-4”。(f) 摩尔斯电码输入和无线解码。设备表面的两个按压级别分别触发点和划。(g) 机械手的多级强度控制。设备表面的四个预设按压级别 (L1-L4) 分别触发单指伸展。 (h) 五个GSDAs传感器分别贴在手指关节上,当手指从伸展状态弯曲到完全屈曲状态时,每个通道的ΔI/I0值单调递增,用于显示字母“U”和“M”。(i) 手语字母U和M的手指通道输出。ΔI/I0值随手指弯曲程度单调递增。
审核编辑 黄宇
-
2017亚太大学生机器人大赛直播2017-08-26 2050
-
高灵敏压力传感器过载保护结构设计2018-11-05 1846
-
东北大学研发了无人机起飞与着陆装置2020-05-13 3889
-
NEC日本东北大学共同开发出非易失化技术2011-08-06 1140
-
研究人员开发用于健康监测的可穿戴式气体传感器2020-03-17 3898
-
东北大学研究团队成功研发出了一款健身机器人2020-04-09 1653
-
华中科技大学:开发具有Serosa模拟结构的自供电2D纳流体石墨烯压力传感器2022-11-17 1935
-
基于可编程微结构的离电子式压力传感器2023-07-02 2229
-
中易云联合东北大学共建工业互联网产业化基地2024-04-17 1384
-
Amass连接器助力东北大学TDT战队荣获机甲大师赛季军2024-09-26 1617
-
CASAIM与东北大学达成合作,三维扫描技术助力异形建材模型重建及尺寸精准分析2024-11-13 912
-
西安交通大学:受章鱼触角接触行为启发的仿生触觉传感阵列2024-12-03 2786
-
是德科技与东北大学合作展示AI-RAN协调测试方案2025-03-05 1503
-
清华大学:鲨鱼与鳄鱼皮肤启发的高性能压力传感2025-07-10 1551
-
东北大学开源鸿蒙技术俱乐部正式揭牌成立2025-10-31 1195
全部0条评论

快来发表一下你的评论吧 !
