

TDICCD的原理、特点及如何在时序电路驱动TDICCD8091设计
描述
引言
时间延时积分电荷耦合器件(Time Delay and Integra-tion Charge Coupled Devices,TDICCD)易于实现实时成像,可与小相对孔径的光学系统配合成像,从而大幅度减少遥感相机的体积和质量,因此广泛应用在航空航天、火控系统和远海探测等领域。现场可编程逻辑门阵列(FPGA)在航空航天、工业自动化、仪表仪器、计算机设计与应用、通信、国防等领域的电子系统中的技术含量正以惊人的速度提升。完整的电子系统在单一FPGA芯片中实现早已成为现实,电子类新技术项目的开发也更多地依赖于FPGA技术的应用。
TDICCD是一种时间延迟积分图像传感器件,精准可靠的时序逻辑信号是TDICCD工作的最基本条件,是保障整个系统有效工作的关键,阐述了以FPGA为开发平台设计TDICCD8091驱动时序的全过程。
1 TDICCD的特点及工作原理
1.1 TDICCD的特点
TDICCD 是一种具有面阵结构,线阵输出的CCD,它的列数是一行的像元数,它的行数是TDICCD的级数N,较普通的线阵CCD 而言,它具有多重级数延时积分的功能。TDICCD 器件利用物体的运动速度与行转移速度同步方式,对物体进行多次(N级)曝光,并对其信号进行累加,随着TDI级数增加,信号随TDI级数(N) 成线性增加,而噪声随TDI级数成平方根增加,TDICCD的信噪比(SNR)增加N 倍,从而获得高的灵敏度和信噪比。利用曝光时间与使用的TDI级数成比例的关系,在不改变帧频的情况下,通过选择TDI级数,改变器件的曝光次数,使器件实现在不同照度下对目标正常成像。
1.2 TDICCD的工作原理
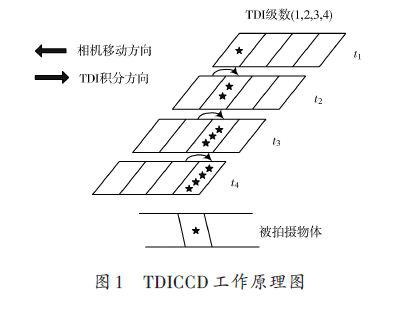
TDICCD相机工作原理如图1所示。相机摄像时随卫星向前移动,对地面同一静止目标物体多次曝光成像,被拍摄物体为地面上静止的星星。在t1 时刻,星星在第1级(行)TDICCD上曝光成像,产生电荷信号;t2 时刻,由于相机向前运动,经过了一个行周期后,第2 级TDICCD 再次对同一个星星曝光成像,产生电荷信号。
与此同时,时钟信号驱动第1级TDICCD 上产生的电荷转移到第2 级TDICCD 上。这样,该行TDICCD 不仅包括此次曝光产生的电荷,而且也包括前一级转移来的电荷,使电荷量增加了1 倍。依此类推,若TDICCD 的级数为N,相机输出信号将增加为原来的N 倍。图1中设定TDI 的级数为4 级,因此在t4 时刻,在TDI 的第4 级(行)星星曝光产生的电荷量为原来的4倍。
2 设计目标分析
2.1 TDICCD8091简介
TDICCD8091是美国仙童公司的一款9 216×128的高速光电传感器,每行的像素点数目高达9 216 个,像元大小为8.75 μm × 8.75 μm ,TDI积分级数为4,8,16,32,64,96,128 可选,行转移速率为12 kHz.电荷读出有向上和向下两个方向可选,每个方向有6 个输出端口,每个端口读出速率为20 MHz,总速率为120 MHz,读出像元电荷数目1 536 个。每个输出端口有寄存器和放大器用来缓存和放大信号。TDICCD8091 内部结构包含有:光积分区域(垂直移位寄存器)、21行独立区域(垂直移位寄存器)和水平移位读出区域(水平移位寄存器),其中,21行独立区域靠近水平读出的3行为快速转移区域,剩下的18行为慢速转移区域,21行均被遮光材料遮挡。
TDICCD8091的外形图如图2所示。
2.2 TDICCD8091的时序要求分析
TDICCD8091积分级数的选择由输入端口VSW128-D(U)、VSW64-D(U)、VSW32-D(U)、VSW16-D(U)、VSW8-D(U)、VSW4-D(U)配合模拟开关控制实现。具体接法:例如当选择向上32级积分时,VSW4-U、VSW8-U、VSW16-U接信号V3,VSW32-U接-3 V电压,VSW64-U、VSW128-U 接+15 V 电压,同时33~128 级的行转移端口接+15 V电压,水平移位读出端口接+3 V电压,1~32级的行转移端口接信号V1、V2、V3,水平移位读出端口接H1、H2、H3、H4.
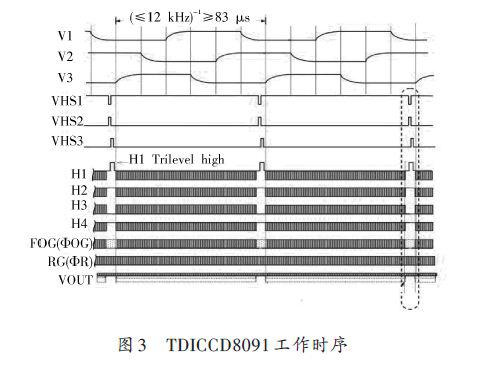
TDICCD8091正常工作所需要的时序信号如图3所示。其中,V1、V2、V3为12 kHz占空比为50%的三相时钟信号,时钟高电平+15 V、低电平0 V,控制光积分区域和21 行独立区域后18 行信号电荷的垂直移位;VHS1、VHS2、VHS3 为12 kHz占空比小于5%的移位时钟信号,时钟高电平+15 V、低电平0 V,控制前3行独立区域信号电荷的垂直移位;H1、H2、H3、H4 为20 MHz占空比50%的四相时钟信号,时钟高电平0 V、低电平-5 V,控制每个端口1 536个像元电荷的水平移位读出,同时,H1信号还控制像元电荷由垂直转移向水平转移的过度,此时高电平为+5 V;FOG为读出时钟信号,时钟高电平+1 V、低电平-5 V;RG是复位脉冲信号,时钟高电平+15 V、低电平+4 V,作用为在每个像元电荷读出前,清除前一个像元残余电荷,信号频率20 MHz.这些时钟的高低电平电压值在硬件电路通过芯片EL7212驱动实现。
3 时序逻辑设计及仿真结果
3.1 时序程序设计
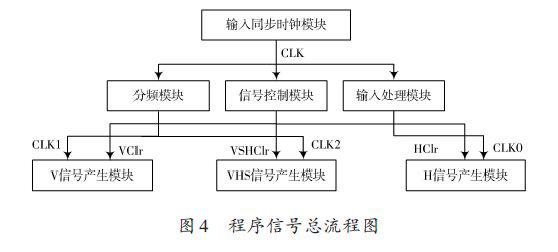
整个时序程序信号总流程图如图4所示。程序总共由7个模块组成:输入同步时钟模块产生频率20 MHz的主时钟CLK,CLK 通过分频模块产生频率36 kHz 的CLK1 和频率5 MHz 的CLK2;信号控制模块在主时钟CLK 的同步作用下分别产生控制信号VClr、VSHClr 和HClr;输入处理模块对输入主时钟CLK做去抖动处理后输出时钟信号CLK0;V 信号产生模块输出光积分区域行转移所需的12 kHz 占空比为50%的三相时钟信号V1、V2、V3;VHS信号产生模块输出12 kHz占空比小于5%的移位时钟信号VHS1、VHS2、VHS3;H信号产生模块输出水平移位读出区域所需的20 MHz占空比50%的四相时钟信号H1、H2、H3、H4,以及FOG读出时钟信号和RG复位脉冲信号。
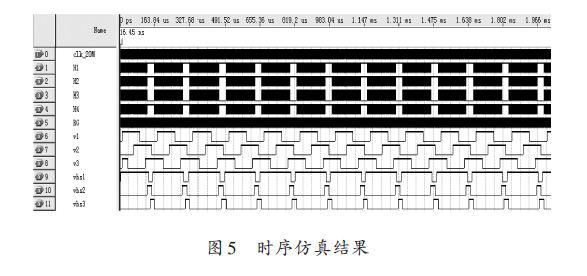
3.2 时序仿真结果
时序设计采用Altera公司的Quartus Ⅱ作为开发平台,EP3C25Q240为硬件平台。总的时序仿真结果如图5所示,结果表明所有仿真信号满足2.2节中的信号要求;图6为FPGA上测得V1、V2的相位关系,图7为FPGA上测得H1、H2相位关系,结果表明相位关系正确,能够保证每个时刻至少有一个高电平和一个低电平,保证像元电荷的正常读出。
4 结语
时序在硬件电路中成功驱动了TDICCD8091工作,验证了软硬件的正确性和准确性。程序设计利用同步时钟控制全局电路的思想,避免竞争与冒险,提高了程序的可靠性;采用模块化设计思想提高程序的可重用性、可测试性、可读性及可维护性;状态机的设计方法提高了程序运行的稳定性。
-
时序电路包括两种类型 时序电路必然存在状态循环对不对2024-02-06 2752
-
什么是同步时序电路和异步时序电路,同步和异步电路的区别?2023-03-25 29070
-
时序电路基本介绍2022-09-12 10567
-
什么是时序电路?2021-03-04 1793
-
基于可编程逻辑器件实现TDICCD驱动时序发生器的设计2020-07-28 1806
-
组合电路和时序电路的讲解2018-09-25 25912
-
适于空间TDICCD相机的图像压缩系统设计2013-09-25 1117
-
基于量子进化算法的时序电路测试生成2010-08-03 995
-
基于FPGA的TDICCD驱动时序设计2010-07-28 402
-
什么是时序电路2010-01-12 8887
-
PLD练习2(时序电路)2006-05-26 762
全部0条评论

快来发表一下你的评论吧 !
