

采用ADN8831芯片的激光器温控电路的设计
描述
引言
通过对半导体激光器特性的研究,可知温度对激光器的正常工作有着重要的影响。温度会直接影响到半导体激光器的工作参数包括:阈值电流、V-I 关系、输出波长、P-I 关系等。同时高温也会对激光器产生极大的影响,严重影响其使用寿命和效率。本文采用ADN8831 温度控制芯片为激光器提供恒定且可调的工作温度来保证激光器高效率工作。
1 温度控制芯片介绍
根据半导体激光器对温度的要求,选定ADN8831作为激光器的温度控制主芯片。ADN8831芯片是目前最优秀的单芯片高集成度、高输出效率和高性能的TEC驱动模块之一。ADN8831 的最大温漂电压低于250 mV,能够使设定温度误差控制在±0.01 ℃左右。在工作过程中,ADN8831 输入端的电压值对应一个设定好的目标温度。适当大小的电流流过TEC,使TEC加热或制冷,在这个过程中使激光器表面温度向设定温度值靠近。此芯片还有过流保护功能,可编程开关频率最高可达1 MHz.
2 TEC控制原理
TEC(Thermo Electric Cooler)实际上是用两种材料不同半导体(P型和N型)组成PN结,当PN结中有直流电流通过时,由于两种材料中的电子和空穴在跨越PN结移动过程中产生吸热或放热效应(帕尔帖效应),就会使PN结表现出制冷或制热的效果,改变电流方向即可实现TEC加热或制冷,调节电流大小即可控制加热或制冷量的输出。利用TEC稳定激光器温度方法的系统框图如图1所示。
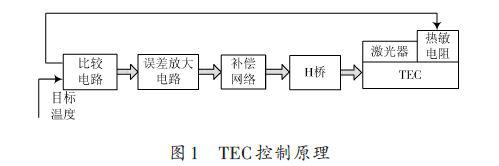
图1中贴着激光器右侧的是温度传感器,这里使用具有负温度系数的热敏电阻。这个热敏电阻是用来测量安放在TEC表面上的激光器的温度。期望的激光器温度用一个固定的电压值来表示,与热敏电阻产生的电压值通过高精度运算放大器进行比较,比较后产生的误差电压通过高增益的放大器放大,同时补偿网络对因为激光器的冷热端引起的相位延迟进行补偿,补偿后驱动H桥输出,H桥不仅控制TEC电流的大小还能控制TEC电流的方向。当激光器的温度值低于设定点温度值时,H 桥会朝TEC 一个方向按一定的幅值驱动电流,此时TEC处于加热状态;当激光器的温度值高于设定点温度值时,H桥会减少TEC的电流大小甚至会改变TEC的电流方向,这时TEC就处于制冷状态。当控制环路达到平衡时,TEC的电流的大小和方向就调整好了,激光器温度就会慢慢的向设定好温度靠近。
3 温控电路设计
3.1 输入部分设计
电桥由R1,R2,RTH组成,当电桥处于稳定状态时候,设定温度值就是激光器表面的温度值,其中RTH 是具有负温度系数的热敏电阻。R1 的阻值可由式(1)计算得到:
式中:RL为激光器在最低温度时,热敏电阻的阻值;RH为激光器在最高温度时,热敏电阻的阻值;RM为激光器在平均温度时,热敏电阻的阻值。控制芯片ADN8831 的3脚(1N1N)输入端的电压值为:
式中:RTH 为热敏电阻的阻值(设定好温度相对应的阻值);基准电压VREF=2.47 V.经测试,室温25 ℃时,NTC热敏电阻的阻值大约为10 kΩ,这时选取R2=10 kΩ,R3=10 kΩ与热敏电阻进行并联。感应的目标温度与输出电压关系成正比,如式(3)所示:
设温度下限TLOW 时VTEMPOUT=0 V,中间值TMID 时VTEMPOUT = VREF/2 ,上限THIGH 时VTEMPOUT=VREF,因此通过改变R1,R2,R3电阻的阻值大小来设定温度控制范围。温度-电压的转换电路,如图2所示。
经测试,温度与输出电压大体上呈线性关系(见图3)。
3.2 补偿电路设计
PID(Proportion Integrator Differentiator)比例积分微分调节补偿网络是TEC温控电路中最关键的部分,它决定了TEC 控制器的响应速度和温度稳定性。PID 相当于放大倍数可调的放大器,用比例运算和积分运算来提高调节精度,用微分运算加速过渡过程,较好地解决了调节速度与精度的矛盾。PID 的数学模型可用式(4)表示:
式中:KP为比例系数;TI为积分时间常数;TD为微分时间常数。
在进行修正时,一般采用调节补偿电路参数的方法来使TEC控制系统的响应时间和精度变得更优。在电路设计时,把前级误差运放的输出连接到温度补偿电路的输入管脚上,这样就完成了温度补偿电路的设计,具体电路连接图如图4所示。
由于本文中测温目标为激光器,根据设计要求和计算,系统的参数通常这样选取:R5=100 kΩ,RH=1 MΩ,RF=200 kΩ,C1=1 μF,C2=10 μF和一个330 pF的反馈电容。
3.3 输出部分设计
ADN8831是一个差分输出方式的TEC控制器。搭建一个外围H桥电路产生适当的电流来驱动TEC,使其对半导体激光器加热或制冷。如图5所示。
图中的P1,P2,N1,N2,OUTA,OUTB 分别连到ADN8831的P1,P2,N1,N2,OUTA,OUTB引脚上。TEC控制器设在H桥中间,构成一个不对称桥。ADN8831对H桥的左支采用开关方式驱动,右支采用线性方式驱动,即当开关管N1导通、开关管P1关闭、P2常通、N2常闭时,电流从TEC的OUTB端经TEC流向OUTA端,此为制冷状态;当开关管N1关闭、开关管P1导通、P2常闭、N2常通时,电流从TEC 的OUTA 端经TEC 流向OUTB 端,此为致热状态。这种灵活又方便的外接H桥,能更好的提高电源效率,减小纹波电流,增加了散热路径。
用非对称H桥驱动TEC,其中器件的选择要考虑两个因素:
(1)TEC工作的最大电流是多少;
(2)导通电阻最小可以是多少(考虑功率耗散问题)。
本文采用的是FAIRCHILD SEMICONDUCTOR 公司的FDW2520C 芯片。该芯片由一对PMOS 和NMOS管构成,其中PMOS管能够提供的最大电流为4.4 A,导通电阻为35 mΩ;NMOS管能够提供的最大电流为6 A,导通电阻为18 mΩ。
3.4 滤波电路
为了使ADN8831 有效地驱动TEC,其电压必须稳定,上述的外围H 桥电路产生的是0~VCC 的脉冲宽度调制方波。所以,这时候就需要设计一个滤波电路来实现驱动的目的。设计采用R-L-C低通滤波网络,其等效电路如图6所示。
图6中,RL表示TEC电阻,R1是C1的等效串联电阻,R2 等于L1 的寄生电阻加上Q1 或Q2 的导通电阻,并且R1和R2 要远远小于RL,VX 是在PVDD 和PGND 之间变化的脉冲宽度调制电压,这个电路构成了一个二阶的低通滤波网络。
4 保护与检测电路
ADN8831 内部提供了相关保护电路,这样起到保护TEC 防止激光器因过热而损坏。因为有时候通过TEC的电流有可能大于额定工作电压,这样会烧坏TEC和半导体激光器,造成经济上的损失。图7为保护与检测电路。
5 结语
通过实验及分析得到,温度控制偏差为±0.01 ℃。系统的恒温控制精度取决于温度采样值与温度设定值的特性,传感器本身的精度较高,其灵敏度取决于其本身特性。若是想得到高稳定性的电压设定值,则需要使用高稳定性、高精度、低温漂的稳压源。此外,系统电路也要使用低温漂、高稳定性的器件。
-
ADN8831温度稳定时间过长如何解决?2024-01-08 0
-
ADN8831可以用数字PID控制吗?2024-01-08 0
-
使用ADN8831遇到的几个疑问求解2024-01-08 0
-
用ADN8831做半导体激光器的温度控制,怎么也不能完全控制好是哪里出了问题?2024-01-09 0
-
TEC 控制器(ADN883X)常见问题解答PDF2018-08-03 0
-
ADN8831的PID参数设置2018-08-06 0
-
请问有ADN8831 的spice仿真模型吗?2018-08-09 0
-
请问ADN8831可以用数字PID控制吗?2018-08-16 0
-
用ADN8831做半导体激光器的温度控制但不能完全控制好2018-11-20 0
-
ADN8831 加热制冷使用问题2020-07-28 0
-
ADN8831在光器件温度控制中的应用2009-11-07 4168
-
ADN8831英文资料下载2017-05-09 1020
-
ADN8831原文资料数据手册PDF免费下载(高效率TEC控制器解决方案)2017-10-28 1801
-
ADN8831 高效率TEC控制器解决方案2019-02-22 3456
-
ADN8831:热电制冷器(TEC)控制器数据表2021-05-08 794
全部0条评论

快来发表一下你的评论吧 !
