

采用PLC与变频器解决车辆电机速度同步的控制
描述
1 前言
当车辆驱动电机采用分散驱动时,受电机转速不同步的影响,可导致车体运行不协调,进而使电机转速偏离正常值,严重时会造成设备损坏。因此,解决车辆驱动电机在分散驱动时产生的电机转速不同步问题具有现实意义。
本文介绍一种利用PLC 解决车辆分散驱动时电机速度同步的先进实用的控制方法。
2 问题的提出
目前,车辆的运行设备一般采用集中驱动( 见图1) 和分散驱动( 见图2) 两种方式。集中驱动变频器与电机的关系是“一拖多”; 分散驱动时两者的关系是“一拖一”。

图1 集中驱动布置图示
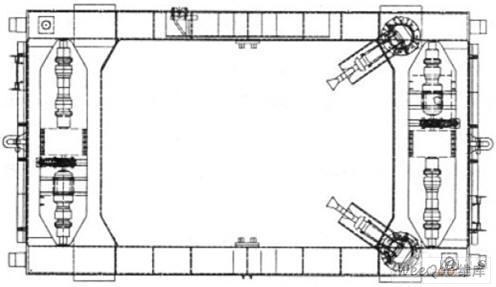
图2 分散驱动布置图示
“一拖多”的优点是控制简单,操作维护方便,但采用集中驱动布置,要求车体具备较大的空间。当车辆负载很大或者车体空间受到限制的时候,通常采用“一拖一”的分散驱动方式,因为其结构紧凑,布局简单。但"一拖一"对变频器和电机有较高的要求,特别是同步问题难以解决。如果电机转速不一致,会出现变频器相对逆向做功,输出电流过大导致跳闸,影响车辆的工作效率和电气设备的使用寿命。如果转速偏差过大,则导致车体变形,影响使用。
3 解决方法
采用PLC与变频器控制方法,实现多个分散驱动电机同步运行。PLC 采用西门子S7400 系列,图3为网络拓扑图。
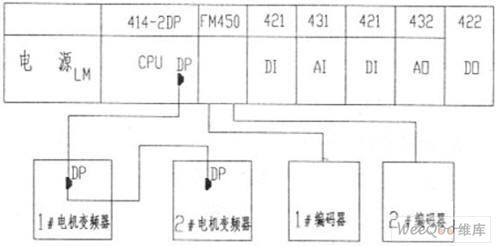
图3 网络拓扑图示
为实现两台牵引电机的速度同步,采用两台变频电机牵引,并分别采用变频器调速进行矢量闭环控制,用PLC直接控制两台变频器。在控制中,PLC与变频器之间采用Profibus 联接,保证输出信号源的同步性。以牵引电机1 的速度为目标速度,由牵引电机2 的变频器来调节其速度以跟踪牵引电机1的速度。将两台增量式旋转编码器与电机同轴联接,使编码器1 和编码器2 分别采集两台电机的速度脉冲信号,并将该信号送到PLC 的高速计数模块中。PLC 以这两个速度信号数据作为输入控制量,进行比例积分控制运算( PID) ,运算结果作为输出信号送至PLC 的模拟量模块,以控制牵引电机2 的变频器。这样,就可以保证牵引电机2 的速度跟踪并随着牵引电机1 速度的变化而发生变化。使两个速度保持同步。
取自编码器采集的脉冲信号,经高速计数模块FM350- 1 进入PLC,转换成电机速度数据。将两个电机编码器的信号相比较,通过PID 调节模块,调整电机转速差值,给定电机2 的转速值MW1000。
MW1000 需要转化成变频器能接受的信号。由于PLC的对应4~20mA 值为0~27648,变频器接收范围值为0~8192,所以MW1000/27648×8192 送到模拟量输出通道,换算成变频器能接受的电流信号,以控制牵引电机2 的变频器,PID 算法是工业控制中最常用的一种数学算法,其基本算式如下:
Pou (t t) =Kp×(et) +Ki×Σ(et) +Kd×[ (et) - (et- 1) ]
式中:Kp—比例调节系数。是按比例反映系统的偏差,系统一旦出现偏差,比例调节立即产生调节作用,以减少误差。
Ki—积分调节系数。使系统消除稳态误差,提高无差度。积分作用的强弱取决于积分时间,常数Ti 越小,积分作用就越强。Kd— 微分调节系数。微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。为了减少电源系统波动等因素引起的外来干扰,在编制控制算法时,必须考虑利用积分环节,即采用一段时间内连续稳定的输入信号而不是某一瞬时值的输入信号进行PID 运算,以消除累积误差,使转数在一定的范围内可调。这样,牵引电机1 和牵引电机2 就能很好地进行同步控制且同步精度较高,从而确保了运行机构的稳定性。
4 控制结果
利用STEP7 编制PLC 上位机监控程序,Wincc采集速度值并绘制曲线。数据提取的时间间隔为15ms。实际上牵引电机1 和牵引电机2 速度是相同的,但为了反映牵引电机2 的跟踪和波动情况,在此特地将其分开,上面是牵引电机1 的速度曲线,下面是牵引电机2 的速度曲线( 见图4) 。牵引电机1 的速度发生变化时,牵引电机2 就能及时地响应,进行跟踪,并且能很快地达到稳定。实验表明,采用PLC 和变频器的控制方法,能达到较高的同步要求,响应快、速度波动幅度较小。
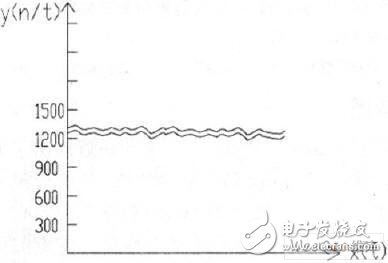
图4 牵引电机的速度曲线
5 结束语
该控制方法已在各种炉下车辆中应用。实际应用中,走行同步起动效果明显,车辆运行平稳。实践证明,采用PLC 解决车辆分散驱动时电机速度同步的控制方法应用效果较好,是一种理想的调速控制方法,满足了生产工艺要求,减少了设备的维修维护费用,保证了车辆发挥正常的生产效率,经济效益显著。随着PLC 与变频器控制方法的广泛应用,必将更好地提高传动系统对速度控制的可靠性与灵活性。
-
变频器怎么样设置速度的2024-10-21 2043
-
多台变频器同步控制的接线和方法2024-08-25 7596
-
PLC控制变频器的原理及应用2024-06-25 3063
-
plc控制变频器有几种方式组成2024-06-11 2216
-
变频器是怎么控制电机的2024-01-09 4585
-
调节变频器的速度来实现精确电机控制2023-11-07 1946
-
plc对变频器控制器的要求 如何使用plc对变频器进行控制2023-08-05 11503
-
变频器和PLC的区别2023-03-17 19190
-
图解PLC与变频器通讯接线,立马学会用PLC控制变频器!2023-01-31 3538
-
PLC通过变频器控制电机2021-09-03 2055
-
永磁同步变频器是如何工作的2020-09-27 7222
-
PLC是如何对变频器进行控制的2019-08-09 9958
-
PLC与变频器连接方法有哪些2018-12-27 8463
-
PLC及变频器在悬挂输送链电机同步控制中的应用2017-08-31 1235
全部0条评论

快来发表一下你的评论吧 !
