

受迫振动自动控制系统的设计与原理分析
描述
1 振动测量原理
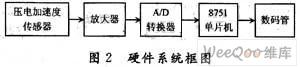
通过激振使悬臂梁产生受迫振动,其振动信号可通过传感器转换为电信号,经放大器将该弱信号放大至0~5 V,再经A/D转换器,将该模拟信号转换成数字信号,进入单片机进行转换处理,处理的结果送七段数码显示对应频率的加速度值。
振动系统的测量原理如图1所示,由信号发生器向激振器提供周期性电压信号,使激振器产生周期性策动力,对弹性梁激振,这样弹性梁产生受迫振动,由压电式加速度传感器将振动的加速度信号转换为电信号。

2 硬件接口设计
(1)硬件系统框图
硬件系统框图如图2所示。
(2)加速度传感器的选择
根据实验数据的要求,采用GIA型压电式加速度传感器。
测量范围0.1g~25g,频率范围0.5~500 Hz。
(3)放大器电路
放大器电路如图3所示。
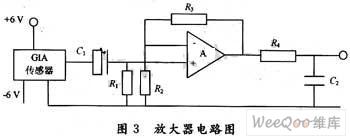
其中,C1和R1构成高通滤波器,硝除直流成分及温度漂移产生的影响,A为比例放大器,放大倍数由R2和R3确定,R4和C2为滤去高频杂音之用。
(4)模数转换电路
模数转换电路如图4所示。
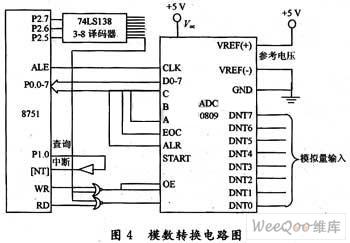
选用ADC0809完成此项功能,图中8031的P2.7~P2.5经74LS138进行全译码,由于用Y7参与ADC0809端口地址的确定,所以与8031的读/写信号经或非门进行组合,确定ADC0809的地址为FFFFH。
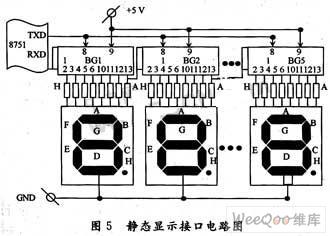
(5)静态显示接口电路
静态显示接口电路如图5所示。
3 软件部分
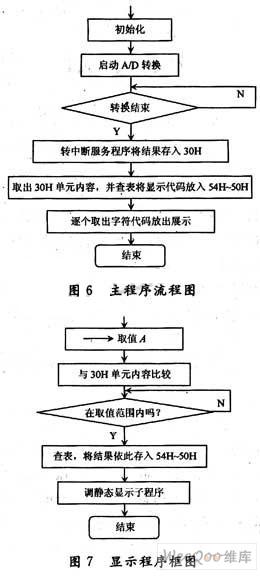
根据硬件连线情况,对A/D转换部分采用中断的方法,根据实验测得的结果确立数据表格,对采样数据的处理采用查表的方法,对显示部分的处理采用串行输出静态显示的方案。
主控程序流程如图6所示,查表显示程序框图如图7所示。
4 结语
悬臂梁受迫振动自动控制系统,结构简单,控制方便,提高了实验效率,有效地克服了视觉误差,如能应用于实验教学,对于深入研究振动规律,能起到很好的辅助作用。
-
自动控制系统的常见故障分析2024-12-18 3500
-
自动控制系统的作用2023-03-25 8048
-
自动控制系统的定义2023-03-21 3731
-
基于PLC的温室大棚自动控制系统设计2021-09-09 2302
-
机房的天线自动控制系统简要介绍2019-06-11 2271
-
《电力拖动自动控制系统—运动控制系统》习题答案2015-11-10 2007
-
寻找自动控制系统高手2014-09-16 2731
-
水泵无线自动控制系统2013-03-09 2921
-
自动控制系统综合分析软件的设计2010-07-06 806
-
基于PLC的物料自动控制系统2009-12-16 2517
-
现场总线对自动控制系统和自动化系统的影响2009-11-17 4871
-
自动控制系统的结构2009-07-27 5403
-
鱼雷自动控制系统实验指导书2009-03-26 2795
-
水温自动控制系统2008-12-01 5191
全部0条评论

快来发表一下你的评论吧 !
