

采用模糊自适应PID控制算法的空气压缩机防喘振控制系统
描述
1.压缩机喘振产生原因
喘振是压缩机固有的一种现象。发生喘振的原因有很多,不仅与其进出口流量有关,还与压缩机负荷,被压缩气体的分子量、温度、压力及管网容量有关。喘振发生的频率与压缩机管网的容量有关,管容越大,发生喘振的频率就越低;反之,频率越高。但其产生的主要原因还是因为压缩机工作流量小于最小流量。
在压缩机的运行过程中,如果其吸入量减少到一定值,压缩比下降,输出管线中气体压力高于压缩机出口压力,被压缩了的气体很快倒流入压缩机,待管线压力下降后,气体流动方向又反过来。此时,其吸入流量和出口压力周期性低频率大幅度波动,周而复始,产生喘振,引起压缩机轴位移,使轴产生弯曲造成机组振动加大,并波及到相邻的管网,喘振强烈时,能使压缩机遭到严重破坏。
2.传统控制方案中存在的问题
根据压缩机的主要原因,为不使压缩机出现喘振,需要保证在任何转速下,通过压缩机的实际流量都不小于喘振极限所对应的最小流量。在生产负荷下降时,须将部分出口气体经旁路返回到入口或将部分出口气体放空,保证系统工作在稳定区。目前工业生产上主要采用固定极限流量控制方案和可变极限流量控制方案。如图1所示为压缩机特性曲线1为喘振极限曲线,曲线2为防安全操作线。
在采用固定极限防喘振控制时,即决定了它只是为防喘振为目的,而不是根据工艺状况调整负荷的大小,一般适用于定转速或转速变化范围较小的机组。如果在机组转速较低的范围运行,会造成流量裕度过大,能量浪费严重,不利于节能。而可变极限流量控制是建立一条安全操作控制线,留有一定的安全裕度。固定极限流量控制和可变极限流量控制都是不精确的近似方法通常都是提供一个很大的额外安全空间,保证机组在不理想的工况下运行,这种额外安全空间可能导致压缩机过多回流,降低了效率。
3.防喘振控制算法
由于固有的稳定性限制,比例积分控制器不能很快的响应工作点向控制线的移动,不足以防止喘振,除非安全裕量非常大。为了满足生产需要,就必须对其进行改进以满足实时的变化情况。
模糊自适应整定PID控制。为了克服传统PID的控制缺陷,将模糊控制与PID控制相结合会大大提高控制系统的性能。运用模糊数学的基本理论和方法,把规则的条件、操作用模糊集表示,并把这些模糊控制规则及有关信息(如评价指标、初始PID参数等)作为知识存入计算机知识库中,然后计算机根据控制系统的实际响应情况(专家系统的输入条件),运用模糊推理,即可自动实现对PID参数的最佳调整,这就是模糊自适应PID控制。
自适应模糊PID控制器以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对PID参数自整定的要求。利用模糊控制规则在线对PID参数进行修改,便构成了自适应模糊PID控制器,其结构如图2所示。
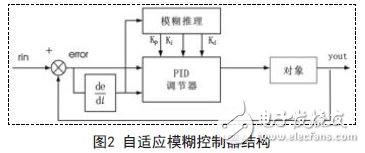
PID参数模糊自整定是找出PID三个参数与e和ec之间的模糊关系,在运行中通过不断检测e和ec,根据模糊控制原理来对三个参数进行在线修改,以满足不同e和ec时对控制参数的不同要求,而使被控对象有良好的动、静态性能。模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表。
Kp,ki,kd的模糊控制规则表建立好后,可根据如下方法进行Kp,ki,kd的自适校正。
将系统误差e和误差变化率ec变化范围定义为模糊集上的论域。其模糊子集为e , e c ={NB,NM,NS,O,PS,PM,PB},子集中元素分别代表负大,负中,负小,零,正大,正中,正小。设e,ec和Kp,ki,kd均服从正态分布,因此可得出各模糊子集的隶属度,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数带入下列计算:

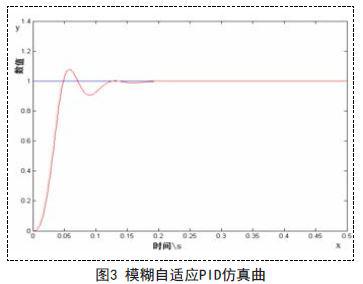
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正。如图3所示即为基于常规传递函数的模糊自适应PID仿真曲线。
4.结束语
本文介绍了当前现有的几种防喘振控制方法,指出了个别方案存在的问题,并提出了一种全新的防喘振控制算法-基于模糊自适应PID控制。从仿真图形看出其可以完成系统的实时控制,计算机可以根据现场的实际情况能自动的调整PID的参数,大大提高了系统的效率。由于喘振是压缩机本身所固有的特性,影响喘振的因素又较多,所以不能仅仅局限在某个控制层面上,必须根据整个工艺流程进行整体的衡量,同时应用先进的智能控制元件,这样才能保证压缩机的安全、平稳高效的运行。
-
压力传感器在工业空气压缩机中的应用2018-10-11 0
-
一个可以控制空气压缩机开关的板2022-09-08 0
-
空气压缩机站远程监控系统的研究与实现2008-12-18 607
-
SLPC在压缩机防喘振控制系统中的应用2009-01-22 547
-
空气压缩机的维护2009-05-23 573
-
空气压缩机选购指南2009-05-25 558
-
基于PLC在矿山空气压缩机控制系统中的应用2010-07-17 519
-
基于51单片机的空气压缩机控制器2010-09-13 1292
-
空气压缩机防喘振控制系统的控制方案分析2018-02-08 2130
-
空气压缩机主要结构说明2018-11-21 21156
-
可乐灌空气压缩机2019-01-16 4548
-
空气压缩机工作原理视频2019-02-25 31989
-
空气压缩机选型_空气压缩机参数2019-12-04 12464
-
空气压缩机会爆炸吗_空气压缩机爆炸原因及措施2019-12-04 33131
-
螺杆式空气压缩机与活塞式空气压缩机的区别2024-01-25 3627
全部0条评论

快来发表一下你的评论吧 !
