

采用模糊控制控制器实现热风炉燃烧控制系统设计
描述
引言
作为热动力机械的热风炉于20世纪70年代末在我国开始广泛应用,它在许多行业已成为电热源和传统蒸汽动力热源的换代产品。通过长时间的生产实践,人们已经认识到,只有利用热风作为介质和载体才能更大地提高热利用率和热工作效果。传统电热源和蒸汽热动力在输送过程中往往配置多台循环风机,使之最终还是间接形成热风进行烘干或供暖操作。这种过程显然存在大量浪费能源及造成附属设备过多、工艺过程复杂等诸多缺点。而更大的问题是,这种热源对于那种需要较高温度干燥或烘烤作业的要求,则束手无策。针对这些实际问题经过多年潜心研究,终于研制出深受国内外用户欢迎的JDC系列螺旋翅片管换热间接式热风炉和JDC系列高净化直接式热风炉。
目前,我国绝大多数热风炉的燃烧控制主要还是采用手动控制,煤气流量和空气流量的大小由人工凭经验手动调节,因此,供热温度波动较大,对热风炉的寿命也有很大影响,并造成煤气的巨大浪费。传统控制方法主要有比例极值调节法和烟气氧含量串级比例控制法,但是由于不能及时改变空燃比,不易实现热风炉的最佳燃烧,且测氧仪器成本高、难以维护,因此,实际使用效果不太理想;数学模型法能将换炉、送风结合为一体,但由于检测点多,在生产条件不够稳定、装备水平较低的热风炉中不易实现;人工智能方法主要有神经网络和模糊控制,神经网络控制对热风炉燃烧过程有极强的自学习能力,但抗干扰能力较弱,而模糊控制不需数学模型,有较强的抗干扰能力且易于实现,因此尤其适用于热风炉这类难以确切描述的非线性系统。
1 热风炉燃烧控制系统
1.1 热风炉的燃烧过程
燃烧过程对应着蓄热室的蓄热过程,它分为加热期和拱顶温度管理期。当拱顶温度上升到一定值后,需要保持拱顶温度维持在这个定值,此时拱顶几乎不再吸收废气的热量,而废气的热量主要被蓄热室中下部所吸收。从废气管道排出的废气,它的温度比较低时,说明热风炉的热交换效率比较高,反之,热交换效率比较低。因此,在拱项温度达到一定值后,合理控制废气的温度上升速率对热风炉的燃烧显得尤其重要。
1.2 热风炉燃烧控制的基本思想
加热期拱顶温度的上升速率和进入拱顶温度管理期废气温度的上升速率,主要取决于燃烧过程的空燃比和煤气流量,同时还受煤气、空气质量和压力波动的影响。实现热风炉燃烧过程自动控制的关键是随着煤气、空气压力和质量的波动及热风炉燃烧状态的变化对煤气
流量和空气流量进行实时调整,空气流量的调整可以转化为对空燃比的调整。故在加热期,可以最大空气流量进行加热,据此来调整合适的煤气流量或者以最大煤气流量进行加热,并调整合适的空燃比,迅速提高拱顶温度;到达拱顶温度管理期,适当减小煤气流量,并调整合适的空燃比,保证拱顶温度不变的情况下,提高废气的升温速率。热风炉燃烧控制系统结构如图1所示。
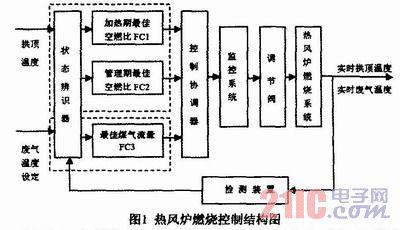
利用状态辨识器可以判断热风炉是处于加热期还是拱顶温度管理期,并且跟踪判断废气的温度是否达到设定值,以此选择不同燃烧阶段的模糊控制器(FC)。
1.3 加热期最佳空燃比模糊控制器
此阶段的最佳空燃比模糊控制器采用双输入单输出的模糊控制结构。选取加热期拱项温度的偏差e及其偏差变化率ec作为模糊控制器输入量,输出控制量为u,即空燃比调节增量。加热期模糊控制器结构如图2所示。

拱顶温度的偏差和拱顶温度的偏差变化率都分为7个等级:正大(PL)、正中(PM)、正小(PS)、零(ZO)、负小(NS)、负中(NM)、负大(NL)。空燃比调节增量划分为7级:快速加大(PL)、中速加大(PM)、低速加大(PS)、不变(ZO)、低速减小(NS)、中速减小(NM)、高速减小(NL)。模糊控制规则表如表1所示。

1.4 拱顶温度管理期最佳空燃比模糊控制器
此阶段模糊控制器的控制目的是使管理期拱顶温度达到拱顶目标温度,模糊控制器采用双输入单输出的模糊控制结构。将拱顶温度偏差和温升速率作为控制输入,拱顶温度偏差划分为7个等级,温度上升速率划分为7个等级,空燃比调节增量
分为7个等级。控制规则与加热期最佳空燃比模糊控制器的控制规则相同。当拱顶温度达到拱顶目标温度,转入到管理期最佳煤气流量模糊控制器。
1.5 拱顶温度管理期最佳煤气流量模糊控制器
在保证拱顶温度不变的情况下,管理期应尽量选择空气过剩系数大的条件进行燃烧,从而获得较多的烟气量,增加热风炉的蓄热量。以最快的时间达到拱顶管理温度,进入温度管理期,在达到废气管理温度之前,都采用温度管理期最佳空燃比模糊控制器,在达到废气管理温度之后,以废气温升速率作为控制量,最高废气温度作为限制终点。模糊控制器以废气升温速率偏差和偏差变化率作为控制输入,煤气流量调节增量作为控制输出量。
2 模糊控制器的热风炉燃烧系统的应用
模糊控制技术是近代控制理论中的一种高级策略和新颖技术。模糊控制技术基于模糊数学理论,通过模拟人的近似推理和综合决策过程,使控制算法的可控性、适应性和合理性提高,成为智能控制技术的一个重要分支。
模糊控制器实际应用于热风炉燃烧系统中,还需要确定模糊控制器输入输出量的论域范围,隶属函数的选取,模糊控制器参数的确定,解模糊化方法及在燃烧初期何时启动和停止模糊控制器的空燃比调节,即是拱顶温度发生变化到什么程度才启动模糊控制器的空燃比调节。故可以取0.6%作为控制目标,并把0.4%~0.8%作为稳态控制区间,在此区间内不进行控制调节。当烟气残氧的体积分数低于0.4%或大于0.8%时启动空燃比调节系统。
本模型嵌入到某钢厂的WinCC监控系统组态平台的运行环境和操作平台,利用可与之相兼容的Visual C++语言进行参数检测和燃烧模型程序的编写,从模型得到空燃比、煤气流量增量转化为对空气调节阀和煤气调节阀的控制,并下发到PLC,从而实现对现场设备的控制,完成集散系统和应用软件的无缝连接。
3 仿真结果
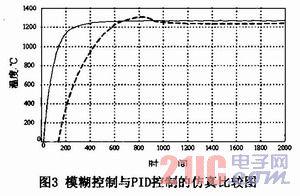
用滞后的一阶惯性环节的拉氏变换近似模拟热风炉的数学模型。确定k及T的值。如图3所示,图3中实线为模糊控制的仿真曲线,虚线为PID控制的仿真曲线。模糊控制算法作用时,其超调量为σp=1.5%,调节时间为ts=550s,PID控制算法作用时,其超调量为σp=4.1%,调节时间为900s.由图形曲线可以看出,模糊控制优于PID控制,模糊控制的响应速度比较快,超调现象明显减小。
4 结论
模糊控制在工业、农业、家用电器等各个方面已经获得许多成功的应用,本文将其运用于热风炉控制系统。根据热风炉自动化控制的要求及热风炉燃烧控制的特性,考虑了国内热风炉基础自动化的现状对热风炉燃烧控制系统进行了设计。在系统中应用了模糊控制理论,并应
用模糊控制技术设定最佳空燃比和煤气流量,以达到最佳燃烧控制的目的。
本文设计的最佳空燃比模糊控制器,涉及热工参量少,对煤气热值、残氧量的检测不作要求,绕开了控制中的建模困难的问题,通过仿真结果与现场实际比较,提高了燃料的利用率,节约能源,而且比采用传统控制方法的燃烧过程更加稳定,能安全平稳地给高炉提供尽可能高温的热风,不像基于热风炉数学模型的一些控制方法对软、硬件要求那样高,投入成本较低,适合热风炉自动控制的要求。
-
热风炉专用热电偶2013-07-05 3388
-
采用LabVIEW实现灰水模糊控制系统设计2019-05-09 1932
-
如何去设计一种基于STM32控制器的模糊PID温度控制系统呢2021-12-23 3160
-
基于可编程控制器的模糊自学习锅炉燃烧控制系统2008-10-18 1272
-
高炉热风炉可变周期运行策略的研究和实现2009-01-07 772
-
模糊遗传算法在热风炉优化燃烧控制中的应用2009-03-17 664
-
应用CBR技术对热风炉送风温度的预测2009-06-17 685
-
Quantum PLC在热风炉控制系统中的应用2009-06-15 983
-
热风炉燃烧控制系统设计与应用2011-09-20 1902
-
基于Matlab的网络控制系统模糊控制算法应用研究2013-09-25 826
-
基于神经网络遗传算法高炉热风炉空燃比寻优_李爱莲2017-01-18 861
-
基于ARM的热风炉自动控制系统的接口设计与实现2017-09-01 646
-
基于Matlab的工业锅炉燃烧系统模糊解耦控制设计的详细中文资料概述2018-06-19 1530
-
热风炉系统操作说明资料免费下载2018-09-03 1202
-
工业热风炉如何实现炉温及压力数据采集远程监控2023-06-02 1286
全部0条评论

快来发表一下你的评论吧 !
