

Aumovio案例研究 | 软件即产品(SWaap)背景下的模型系统工程与闭环系统验证
描述
客户背景
Aumovio作为一家科技公司,致力于为当前及未来的移动出行挑战提供硬件、软件与服务的最佳融合方案。
挑战
在软件即产品(Software as a Product,SWaaP)的应用背景下,本案例需要基于Level1虚拟ECU,实现电动尾门的模型化系统工程和闭环系统验证。同时,需要确保虚拟系统行为与真实系统具有足够的一致性与准确性。
SWaaP方案的核心挑战在于:在没有真实硬件的情况下,需要实现足够精确的系统行为建模,以支撑系统与软件的开发、集成和验证。同时,需要推动开发与验证工作的生命周期前移。为此,需要构建一个可用于系统与软件开发,闭环系统验证的虚拟等效环境。
针对虚拟电动尾门系统的关键设计参数与挑战包括:
时间分辨率与仿真同步性
闭环系统行为的稳定性
虚拟与真实系统行为及验证的一致性(例如夹手检测的精度)
复用现有HIL模型的能力
将软件组件集成到虚拟系统/ECU的复杂度
执行自动化测试
解决方案
为系统中的每个组件创建虚拟模型,并将这些虚拟模型互相连接。
真实硬件系统由运行在目标板上的电机控制模型,以及用于控制车辆尾门的硬件组成(如电机、霍尔传感器、H桥等)。在虚拟系统中,电机控制模型以软件组件(MotCtrl)的形式运行在由vVIRTUALtarget生成的vECU中。基于Simulink开发的被控对象模型包含:H桥、电机、尾门的机械仿真模型以及整个传感器部分,由这些模型组成虚拟测试环境。vECU与被控对象模型通过CANoe仿真环境中的CAPL脚本互相关联,同时,CANoe作为vECU和被控对象模型的运行环境,能够确保仿真过程中各组件之间的时间同步性。
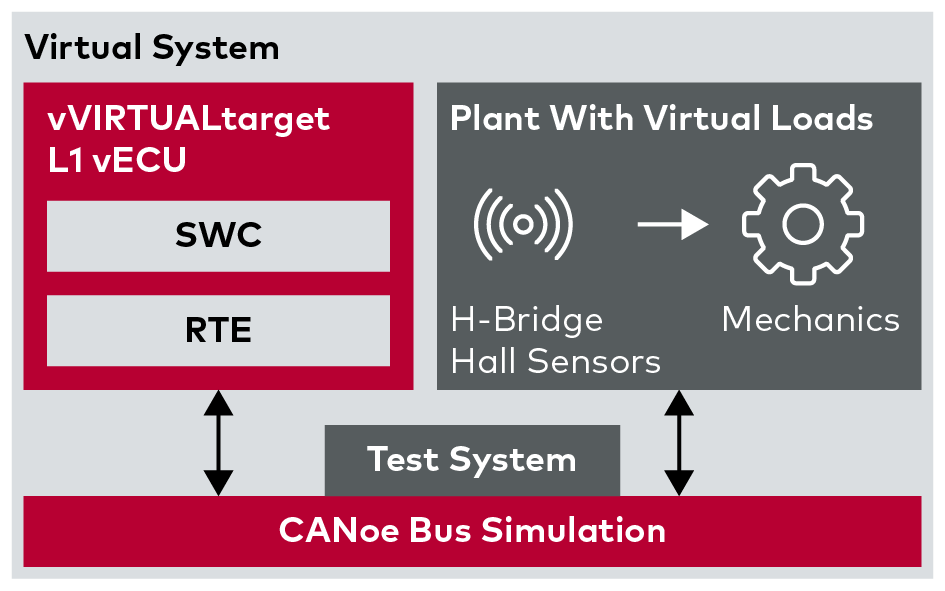
电动尾门闭环系统的虚拟测试架构
优势
借助虚拟模型,将软件和系统开发、集成与验证前移,从而提升质量,同时降低成本。
该方案的主要优势包括:
>
软件组件在vECU中的集成相对容易
>
被控对象模型在CANoe环境中的嵌入较为容易
>
软件组件与模型可复用于真实目标系统
>
为后续目标硬件集成做准备
>
无需真实硬件即可执行闭环测试和调试
>
可实现基础系统验证
-
请问数字电路的系统级设计验证工具及流程?2012-09-05 3811
-
GNSS系统工程师-深圳2015-03-11 2287
-
诚聘 资深电声系统工程师2016-09-27 1777
-
怎样去构建一种SoC系统验证平台?2021-04-28 2206
-
ETest_CPS工业信息物理系统验证测试平台的用途2021-12-24 1231
-
智能水资源系统工程探讨2010-01-03 599
-
食品安全/质量管理系统验证问卷2010-02-02 433
-
基于SystemC的系统验证研究和应用2010-02-24 956
-
自动驾驶系统验证需要考虑的因素2019-07-11 4174
-
可靠性系统工程中的测试性技术2020-12-25 2327
-
高压电气系统验证2022-10-13 2232
-
钢铁厂专用系统工程2022-11-10 1477
-
汽车SPICE与基于模型的系统工程2023-11-17 1432
-
基于架构设计的车载网联系统验证体系研究2024-01-24 1920
-
如何实现基于模型的系统工程2025-07-22 1235
全部0条评论

快来发表一下你的评论吧 !
