

利用SPMC75F2413A单片机设计直流变频洗衣机
描述
1 引言
洗衣机是一种在家庭中不可缺少的家用电器,发展非常快,全自动式洗衣机因使用方便得到大家的青睐,全自动即进水、洗涤、漂洗、摔干等一系列过程自动完成,控制器通常设有几种洗涤程序,对不同的衣物可供用户选择。变频控制依其高性能、节能等优点在洗衣机的控制中得到广泛应用,下面介绍采用凌阳科技公司的SPMC75F2413A和SPCE061A单片机来设计的直流变频洗衣机的控制系统。
2、芯片特性简介
SPMC75F2413A是凌阳科技公司开发的用于变频驱动的嵌入式16位微控制器,适用于变频电动机驱动、电源、家电和车内风扇控制系统等领域。
特性包括:
凌阳16位u‘nSP处理器(ISA 1.2)
工作电压:4.5V~5.5V
最高运行速度:24MHz
工作温度: -40 ℃~85 ℃
芯片内存储器:
32KW (32K×16) Flash
2KW (2K×16) SRAM
基于时钟发生模块的锁相环电路
看门狗定时器
10位模/数转换器
8通道输入
10us (100kHz)转换时间
串行通讯接口
通用异步串行通讯接口(UART)
标准外围接口(SPI)
64(QFP80)/53(QFP64、SDIP64)个通用输入输出管脚
电源管理
2种低功耗模式:Wait/Standby
每个外设都可以独立的供电
两个比较匹配定时器
5个16位通用定时器
2个用于驱动电机的脉宽调制输出(互补的3相6路脉宽调制输出)
2个用于速度捕获
1个用于速度反馈环
中心(center)或边沿(edge)脉宽调制输出
通过外部错误保护管脚进行脉宽调制输出保护
可编程的死区控制(Dead time control)
脉宽调制服务和错误中断发生
具备驱动交流感应电机和直流无刷电机的能力
内嵌在线仿真功能(ICE)
3 系统总体方案介绍
整个系统主要由两部分组成:由SPMC75F2413A控制的DMC控制板和由SPCE061A控制的PANEL板,两者之间的连接系统方块图如图3.1所示。

PANEL控制器采用16 位SPCE061A控制器,主要完成的功能有:按键扫瞄、状态显示与通讯。洗衣机的控制通过按键输入来选择操作模式,并可设定选择水量、预约时间,详细设定洗衣、洗净及脱水的参数;电源按键钮为起始与驱动控制电路板的连接,起动或暂停键为运转洗衣机或暂停。运转过程中的剩余时间透过7 段显示器来显示。
DMC 控制器采用16 位SPMC75F2413A 单芯片控制器,主要完成的功能有:侦测马达转子的位置讯号,以120 度方波驱动PWM 方式驱动直流无刷马达。
4 系统硬件设计
系统控制包括DMC控制板和PANEL控制板两部分,下面主要介绍DMC控制板硬件设计。
4.1 电源电路
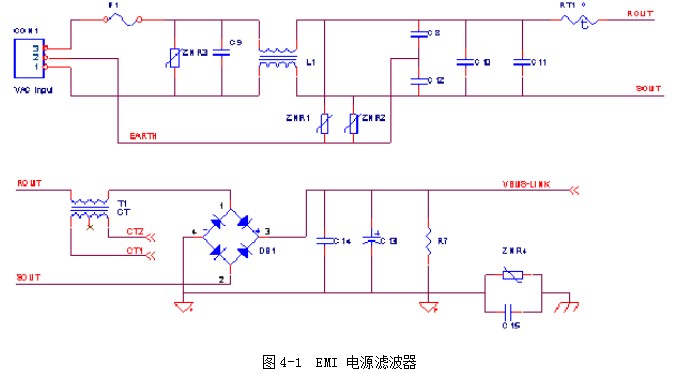
图4.1为EMI 电源滤波器与单相全桥整流器电路,AC 电源输入接头为CON1,电压为220VAC,电源输入端通过突波吸收器ZNR3以避免过大的电压突波损坏器件,C8 与C12 的Y2 电容串联后连接至接地点,通常也可以连接至机壳。透过全桥整流器DB1整流、C13 滤波后可得到输出直流电压。
4.2 MCU控制电路
图4.3为MCU控制电路,此部分的电路主要是以u’nSP SPMC75F2413A 微控制器为主,CON5连接在线调试、仿真器ICE。
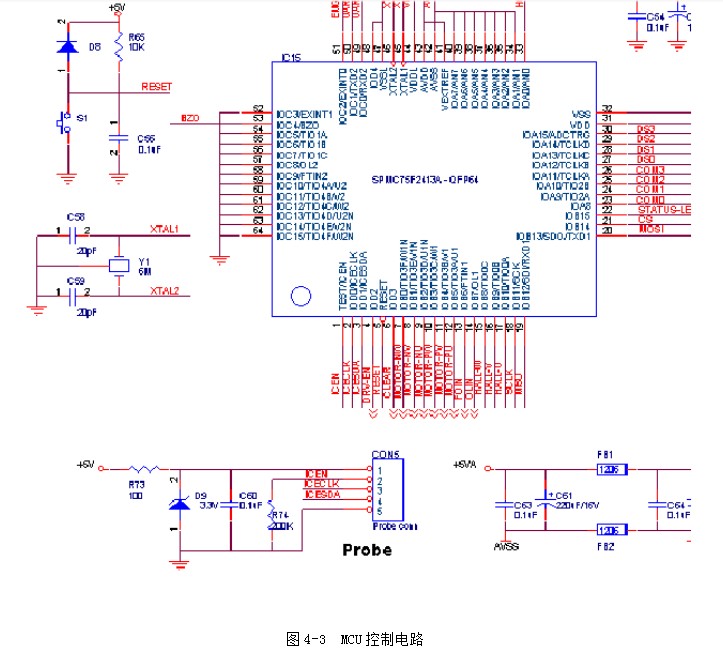
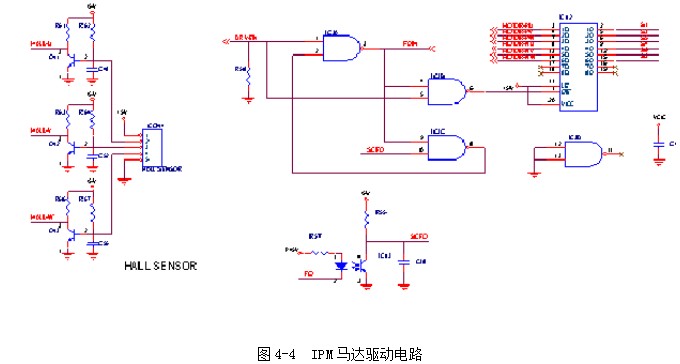
图4.4为IPM马达驱动电路,因为驱动的马达为三相变频,因此一般来说微控制器需具备能够输出6 个PWM 讯号的能力,SPMC75F2413A 在芯片硬件上可由MCP 与PDC 定时器模块完成此功能。IPM 模块内集成了动回路与过电流检测电路,MCU 的PWM 输出讯号通过光耦送到IPM 模块,但在实际应用上需考虑到对MCU 的保护与快速地对IPM 模块产生高阻抗讯号,因此在电路中加入了IC12 的缓冲电路;过电流回馈讯号经光耦合器后连接到FTINx 的输入脚,以求能够对IPM 模块快速地保护。D5、D6、D7、C37、C40 与C43 产生组成自举电路提供IPM上臂开关的驱动信号。
4.4 水位检测电路
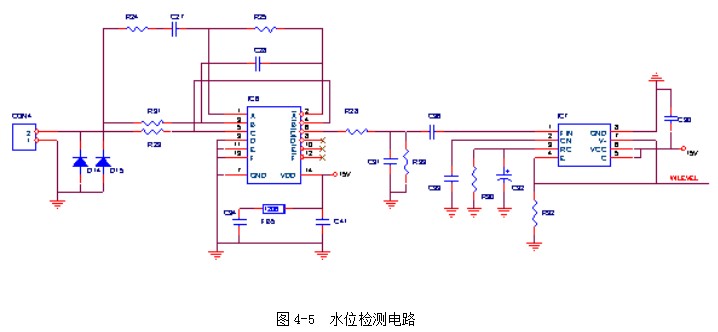
图4.5为洗衣机的水位检测电路,CON4连接水位传感器,水压大小产生LC 震荡,压力越小则频率越大,反之亦然。当接近零水位时,输出频率约在27.8KHz。此频率通过F/V 转换电路,转换为模拟电压输入至芯片内ADC 模块来计算水位高低。
F/V 转换电路由IC7所产生,电路组件R33 与C36 形成输入端高通滤波器以滤除直流电压,输出电压大小由R30、C33 与输入频率决定,电压计算式为: Vo = R30 x C33 x Vcc x Fin;其中Vcc 为+5V、Fin 为输入频率。
5 系统软件设计
变频洗衣机控制器主要以双MCU 设计,两控制器通过串行通讯交换讯息与系统控制,设定SPCE061A 面板控制器为主机,SPMC75F2413A 马达驱动控制器为从机。主机负责整个传输的过程;从机端负责接收主机端传送的命令并执行,且需响应相对应的ACK 讯号给主机,相对地。当使用者在面板控制器上下达对应的运转命令后,从机负责执行,当有异常状况发生时,从机实时回报或直接能够由主机检知,利用显示电路通知使用者。
因此本系统的软件开发包括针对马达驱动、通讯格式与通讯状态机切换、洗衣机状态机切换、按键扫瞄与状态显示等程序为主;以下将针对DMC 控制器与PANEL 控制器重要的程序给予说明。
5.1 直流无刷马达驱动程序
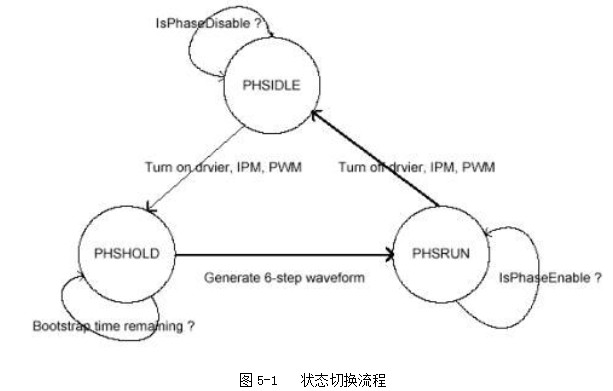
在DMC 控制器主要负责直流变频马达驱动,可区分为两大部分:内回路的电压控制与外回路的速度控制。内回路电压控制系针对侦测到的马达转子位置(由霍尔组件读取得到),由于马达转子为永久磁石结构,因此由微控制器所输出的电压讯号需对应于所读取到的霍尔组件讯号,在实际的设计例中是以定时器Timer3 产生4000Hz 的固定周期的中断时间,在每次中断程序中会对霍尔组件输入接口作读取的动作,并输出相应的电压H/L与PWM 讯号,此程序以有限状态机实现,共区分3 个状态为PHSIDLE、PHSHOLD 与PHSRUN,在PHSIDLE 主要工作在禁能DMC 驱动器并对调控参数进行初始化,PHSHOLD 状态在保证产生自举电压,而PHSRUN 则是真正产生120 度方波讯号,详细程序流程可参考如图5-1 所示。
5.2 马达转速计算与控制程序
洗衣机的直流无刷马达为同步马达,亦即马达的机械转速与磁场旋转频率为同步的。因此可根据马达的霍尔位置讯号计算脉波宽度的时间即可计算出马达的实际转速,达到闭回路的速度控制。利用SPMC75F2413A的PDC0中断做相位检测,TPM2定时器中断计时来完成位置检测和速度计算。图5-2为PDC0和TPM2中断流程。
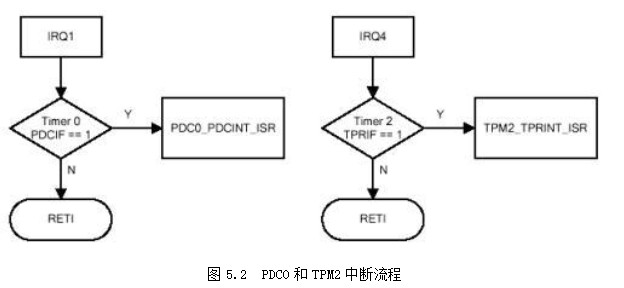
其中PDC0_PDCINT_ISR()负责检测霍尔组件的脉波宽度,TMR2_TPRINT_ISR()负责当马达转速变化时更新实际转速值并作控制。
5.3 串行通讯程序
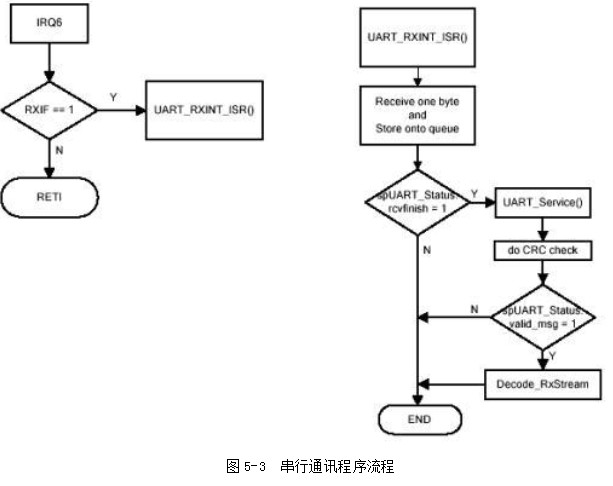
DMC控制器和PANEL 控制器通过UART交换讯息,采用CRC校验方式,所有的通讯动作的起始、中止与异常检出皆由PANEL 控制器所主导。
DMC 控制器以环形队列(circular queue)存储数据,串行字符是以中断接收并储存在的缓冲区中。DMC 控制器检查所收到的串行字符命令,若所收到的字符组正确无误,则对相应的命令回应给PANEL 控制器,若是接收为有效的命令,则执行Decode_RxStream()程序以译码出控制命令与数据,并对PANEL 控制器发出ACK讯号;反之,若接收为无效的命令,则对PANEL 控制器发出NACK 的讯息,以利PANEL 控制器作讯息的控制与再传送的动作。程序流程图如图5-3 所示。
5.4 PANEL控制器韧体说明
当按下『电源』按键时,PANEL 控制器将会开始通讯动作,尝试与DMC 控制器握手特定的讯息内容,当从回传的字符组被PANEL 控制器认可后,才可接受使用者对洗衣机的操作;否则,将判定为通讯异常情况发生。当使用者已经选择将洗衣模式与参数内容后,按下『启动/暂停』按键会使马达开始运转。系统预设有4 种运转程序,对应的洗衣参数见表5-1:
上表在P1 程序可单独调整个别参数,但P0、P2 与P3 程序则无法更改系统默认值。举例说明,当使用者只需要对作衣物脱水的动作,只需要将洗衣时间、洗衣次数对应的7 段显示器调整至不显示,再调整所需的脱水时间,按下启动按键,即进入脱水模式。
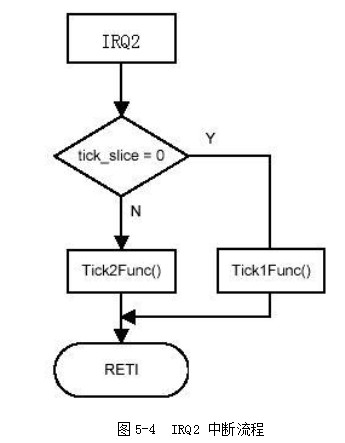
『预约时间』的设定则由3 小时至9 小时,每次调整间隔1 小时。上述功能在软件设计上是以定时器中断执行,时间的设定利用Timer B 定时器(IRQ2 中断),设定为8000Hz 频率中断,在此程序中分为2 个time slice,分别为Tick1Func 与Tick2Func,程序如图5-4 所示,因此Tick1Func 与Tick2Func 程序的执行频率为4000Hz。
在Tick1Func程序中,除了对按键输入作扫瞄的动作,另外依据按下的按键内容更改SystemT 与SystemF 结构的内容,其中SystemT 主要储存设定洗衣参数内容并更新SA7Wash 的结构(用于状态机切换), ystemF 为纪录运转的状态标志。当洗衣参数被更改后,将会改变预估洗衣完成时间,并于7 段显示器中显示。Tick2Func 程序负责扫瞄电路上的显示电路,采用高速的循序显示,以节省IO 接口的资源,此程序并包含依据水量的预估来提示使用者所需加入的洗剂量。
6 结语
该系统采用凌阳科技公司的SPMC75F2413A和SPCE061A单片机来完成直流变频洗衣机的控系统制,SPMC75F2413A为专用于变频马达控制的IC,其强大的PWM输出功能使得程序开发非常方便。SPCE061A除了具有普通单片机的功能以外,还具有语音识别、语音录放等功能,可以将洗衣机的一些使用状态、常识播报出来。
-
怎么实现基于SPMC75F2413A智能功率模组芯片的AC变频空调方案设计?2021-06-16 1217
-
基于SPMC75F2413A单片机的步进电机加减速控制2016-05-03 648
-
SPMC75F2413A设计的通用变频器2014-08-11 2277
-
单片机+IPM模块实现通用变频器2012-02-10 8903
-
基于单片机SPMC75的模拟全自动洗衣机的设计2010-07-28 918
-
介绍SPMC75F2413A 的中断系统2009-09-21 3120
-
用SPMC75F2413A单片机和IPM模块PS21865A2009-09-19 1977
-
SPMC75系列单片机的高性能三相变频电源设计2008-08-04 4833
全部0条评论

快来发表一下你的评论吧 !
