

基于TMS320LF2407A和CY09449芯片实现运动控制卡的设计
描述
引言
当今,开放式数控系统正在工业领域得到广泛应用。其中,工控机通过PCI总线连接专用运动控制卡的数控系统最为流行。在运动控制卡中,由于DSP采用多总线哈佛结构使得处理指令和数据可以同时进行,因此相比传统控制中的单片机具有更多的优势。同时,运动控制卡与PC机通过PCI局部总线通信,能够达到很高的数据传输速率,从而还保证了数控系统的实时性。
系统概述
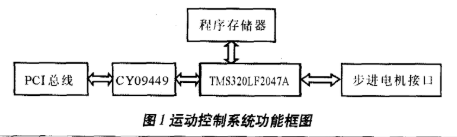
系统的功能框图如图1所示。该系统的核心是TI公司的16位定点DSP芯片TMS320LF2407A。DSP芯片负责接收PCI局部总线的命令和参数,然后经过特定的运动控制算法,如系统位置、速度调节、插补算法等,从而完成对步进电机的精确运动控制。同时DSP芯片还负责将反馈信息传输给PCI局部总线,并且控制系统外围I/O模块。DSP芯片与计算机的通信通过PCI桥接芯片CY09449实现。
DSP模块
DSP芯片TMS320LF2407A采用高性能静态CMOS工艺,供电电压仅3.3V;指令周期缩短到33ns。
作为系统的核心,TMS320LF 2407A主要完成复杂的运动控制算法,比如升降频控制、插入补偿等。本设计主要是完成双轴步进电机控制,故插入补偿采用经典的DDA算法。由于本设计对步进电机采用无反馈控制,这样对步进电机的升降频控制就显得格外重要,这也成了整个系统设计的一个难点。根据步进电机变速过程动力学特性,以指数曲线前段规律作为前后沿的近似梯形波,进而确定升降频特性,这样既能保证步进电机运行过程不会失步,又充分发挥了步进电机的固有性能,使升频过程达到时间最短的要求。下面讨论一下升降频控制的算法实现。
升降频控制
为实现所确定的运行频率—时间函数,通常是将其离散化,即将其转换为脉冲时间间隔对脉冲个数的函数。另一种方法是按升降频过程所走过的脉冲步数通过定步中断来变频。但是离散化方法既会引起频率突跳和失步,又要进行复杂的迭代运算,而定步法同样需要进行迭代。这两种方法在DSP上都不易实现且灵活性较差。为此本文研究了一种称为定时的方法。
设最高运行频率为fh(电机恒速段的速度),升频段总时间为ts。则根据步进电动机指数型升频过程的频率—时间关系:
f(t)=fM-(fM-fb)*exp(-t/T) (1)
式中fb为步进电动机起动频率;fM为极限运行频率;T为驱动系统时间常数
则有fh=f(ts)=fM-(fM-fb)*exp(-ts/T)
从而得到
ts=T*ln((fM-fb)/(fM-fh)) (2)
将ts等分为N段,得到各段时间为:ta=ts/N
则在第i个等分段ta内脉冲切换频率和要送出的脉冲数分别为:
f[i]=f(i*ta)=fM-(fM-fb)*exp(-i*ta/T)(3)
X[i]=ta*f[i] (4)
故升频段的总步数为:
P=X[0]+X[1]+…+X[N-1] (5)
将脉冲间隔1/f[i]转换为DSP内部16位定时器的时间常数K[i]。转换关系式为
K[i]=f_DSP/f[i], i=0,1,2…, N-1 (6)
由于降频段特性变化规律与升频段相反,可知降频序列是升频序列的逆序列。
电机在恒速步进阶段,以fh的换相频率步进。因此对应的定时器时间常数为:
K[N]=f_DSP/fh (7)
恒速段总步数为:
X_h=X_total-2*P (8)
式中X_total为步进电机运动的总步数。
电机运行前,由主程序计算出升频段和恒速段定时器时间常数序列K[i](i=0, …,N-1),存放于DSP的SARAM中,形成一个K-P升速表格。当电机运行时,在线查表,并取出K[i]用于设置DSP的PWM中周期寄存器的值,从而不断改变PWM波形的周期,实现对电机的速度调节。根据升速、降速或高频恒速,决定升速表地址指针增1、减1或不变。通过这种定时的方法,一方面提高了系统的灵活性,可根据输入的最高频率、起动频率等参数改变升降速表,另一方面升降速表的求取不占用运行时间,从而提高了运行效率。
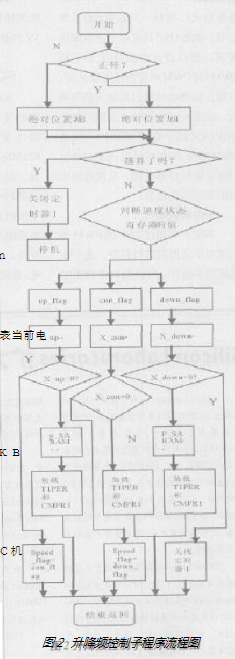
系统的部分软件流程
图2为升降频控制子程序流程图,其中:p_SARAM为指向电机升降速时间常数表的指针,采用DSP的内部SARAM来存放该表;X_up、X_con、X_down分别代表电机在升速段、恒速段、降速段要走的总步数;up_flag、con_flag、down_flag分别代表当前电机的运动状态(升速、恒速、降速)。
DSP与PC机的通信
DSP与PC机的通信通过CY09449连接,CY09449内部带有128KB双向静态SRAM,为了在工作中,使PC机和DSP对SRAM的访问不会发生冲突,本设计中把SRAM均分为两个单元A和B, PC机和DSP对这两部分的操作采用乒乓操作模式。由于DSP具有外部数据存储器扩展能力,所以该SRAM完全可以作为DSP的外扩数据存储器,这样在设计中便采用DSP的外部数据存储器有效信号/DS来作为CY09449的片选信号/SELECT。
DSP的编码接口
本设计也考虑到如果需要对电机进行高级精确控制时,就需要对电机进行闭环控制。一般情况下,会运用光电编码器作为系统的闭环反馈元件。由于本设计是针对双轴步进电机的运动,而单轴的光电编码器就输出两相相差为90°的脉冲信号A、B,以及归零信号Z(都是差分形式),这样一共就有6路反馈信号。但是DSP只有两个正交编码单元,所以设计中把DSP的引脚PWM9和PWM10设为通用输入脚。这样,反馈信号经过高速光耦隔离后,就送入到DSP的正交编码接口QEP1/QEP2、QEP3/QEP4,以及PWM9/PWM10,然后由DSP对该反馈信号进行计算处理,从而得出电机的实际运动信息。
步进电机接口
本设计中通过DSP的PWM单元来对步进电机进行控制。由于电机是功率器件,所以由DSP输出的PWM波形不能直接输入到驱动器中,而是必须采用光耦进行隔离,这样才能避免电机的大电压信号把DSP烧坏。此外由于DSP输出的PWM信号很弱,如果直接加在电机驱动器上,驱动器将检测不到该信号,所以在DSP的PWM信号输出级需加长线驱动。本设计中采用了5V的差分长线驱动器AM26LS31。
PCI模块
本系统选择PCI局部总线作为DSP与上位机的通信方式,主要是因为PCI总线速率最高可达528Mbps,实时性强。PCI总线的开发一般可以有两种方案实现:一种是用FPGA实现;另一种则是使用专用的PCI接口芯片。为节省时间本系统选择专用芯片CY09449进行开发。该芯片采用3.3 V 单电源供电,兼容3V和5V 的PCI信号环境。CY09449的电源可由PCI槽引出,PCI槽可以提供3.3V、5V、12V电压,在PCI槽有两个引脚需特别注意:PRSNT1和PRSNT2,这两个引脚接地和悬空的4种组合直接决定PCI卡的功率。CY 09449在使用时,某些引脚要加阻值为1k?~1Ok?的下拉或上拉电阻。根据本系统地具体情况在该设计中,SCL、SDA、ALE、/BE[2]、RDY_IN引脚加上拉电阻, TEST_MODE引脚加下拉电阻。
结语
基于PCI总线,配以数据处理能力强大的DSP设计的步进电机运动控制卡,在开放式数控系统中能够发挥出理想的运动控制性能。随着数控系统的普及和产品档次的提高,这种运动控制卡将会有广泛的应用前景。
责任编辑:gt
-
控制器TMS320LF2407A系列数据手册2021-07-20 1375
-
TMS320LF2407A为数字控制系统的设计提供了参考2021-04-14 1587
-
基于TMS320LF2407A的全数字单相变频器的设计及实现方法2021-04-02 1937
-
基于TMS320LF2407A和CY09449芯片设计的运动控制卡2020-12-21 1432
-
如何使用TMS320LF2407A的bootrom2016-07-13 6542
-
基于TMS320LF2407A的SVPWM变频系统的研究及实现2016-05-06 919
-
基于TMS320LF2407A的SVPWM变频系统的设计2016-04-19 822
-
基于TMS320LF2407A的SVPWM变频调速系统的应用2016-04-18 872
-
基于TMS320LF2407A的调音器设计2012-12-18 7318
-
TMS320LF2407和TMS320LF2407a 有什么区别啊。。。2012-02-27 4927
-
基于DSP芯片TMS320LF2407A的全数字单相变频器的2010-11-27 2859
-
基于TMS320LF2407A直流电机闭环调速控制系统的设计2010-02-11 886
-
TMS320LF2407A基于CAN总线技术的数字交流伺服系2009-10-12 1676
-
TMS320LF2407A 矢量控制变频器的开发经验2009-05-18 600
全部0条评论

快来发表一下你的评论吧 !
