

基于PC104的高集成度和模块化de设计及在温度控制系统中的应用
描述
1、引言
温度在工业控制中是个很重要的参量,一个温控系统可以纯粹是个小型的控制温度的系统 ,也可以是整个大系统中的一个部分,但都需要用相应的硬件装置、机械设备和控制这些设备运行的软件来实现,而影响温度参量控制的主要因素也是来自这3个方面。但在具体设计时,这3个方面是相互约束又相互补充的,尤其是需要对温度瞬间的变化作出相应控制的系统,比如在某个温度区间里需要有什么样的控制精度、温度斜坡时间和温度均匀性等要求, 在机械设备已经限制的情况下,可以通过对硬件电路和软件的设计来弥补。
很多温度控制系统中,一般选用单片机来实现,由于每种单片机一般都有各自的一套开发 工具,需要花费一定时间和精力去学习研究才能掌握,并且相关的硬件接口设计也比较复杂 ,而采用PC104作为核心中央处理器,则可将主要精力放在软件和接口的设计上,而且PC104 的开发、维护和扩展都非常方便。PC104与通用的PC和PC/AT标准(IEEEP996)完全兼容,可以很快掌握其软、硬件的使用,而且他具备嵌入式控制的特殊要求:体积小、成本低 、可靠性高、寿命长、编程调试方便,配以不同功能的板卡,为嵌入式应用提供了标准的系 统平台。本文主要介绍了当前工控产品中比较广泛的PC104总线的硬件接口电路的设计以及软件设计,并把他作为一个嵌入式平台,运用到温度控制系统中,实现对温度参量的控制。
2、PC104总线简介
由于普通PC机在工业现场控制中存在着体积庞大、功耗高、可靠性差等缺点,美国Ampro 公司、德国Jeptec公司、瑞士的DigitalLogic公司等在1987年推出了PC104嵌入式模块,而严格意义的规范说明在1992年才公布,IEEE协会将IEEEP996作为PC和PC/A T工业总线规范,而把PC104定义为IEEEP9961,所以实质上PC104就是一种紧凑型 的IEEEP996。
PC104总线是专门为嵌入式控制而定义的工业控制总线,其信号定义和ISA总线一致,但电气规范和机械规范却完全不同,是一种优化的小型、堆栈式结构的嵌入式总线标准。PC104 与ISA相比具有的一些独特的功能主要有:
(1)小尺寸结构标准PC104模块的机械尺寸是3.6英寸×3.8英寸 ,即96 mm×90 mm。
(2)堆栈式连接去掉总线底板和插板滑道,总线以“针”和“孔”形式 层叠连接,即PC104总线模块之间总线的连接是通过上层的针和下层的孔相互咬合相连,这 种层叠封装有极好的抗震性。
(3)降低总线驱动电流减少元件数量和电源消耗,4 mA总线驱动 即可使模块正常工作,每个模块的功耗大约1~2 W。
3、系统总体设计
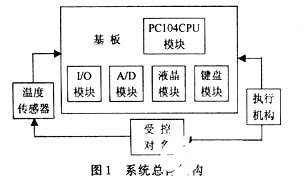
系统总体结构设计如图1所示。
3.1硬件电路设计部分
此部分包括PC104CPU模块,该模块上主要有CPU芯片、DRAM内存、并口、串口、在板支持可读写的固态盘、看门狗和实时时钟等,另外还有I/O模块、A/D模块、液晶显示模块、键盘输入模块和打印输出模块等。系统设计了一块基板,在其上面布上PC104总线,然后把PC104CPU模块、I/O模块、A/D模块等模块通过堆栈式连接方法构成一个完整的硬件系统。此方法的特点:他是在特定的I/O中插入嵌入式计算机而代替以往将I/O扩展板插入到计算机中的办法,他体现了嵌入式系统的设计方法。
在进行PC104接口模板设计时,为了实现与系统总线的连接,模块应具备地址译码功能和数据总线缓冲功能。
3.1.1地址译码电路设计
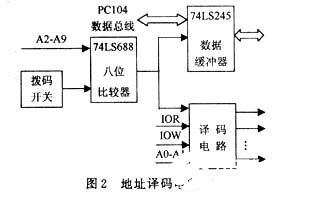
由于在此系统总线上插入了多块功能电路板,因此必须对每一块功能电路板设定不同的地 址,为了方便系统的灵活配置,采用拨码开关的方式。如图2所示。其中A0~A9为PC104总线的10 b外部端口地址线;IOR,IOW分别为系统总线的读、写选择信号线;数据比较器的输出用来控制数据总线缓冲器和译码电路的片选信号;译码电路的输出用来控制具体电路板中的不同功能操作。根据每种功能电路板的设计特点,译码电路选择了不同的器件,在A/D 板中用的是74LS138译码器,在I/O板中用的是可编程逻辑器件。
3.1.2数据总线缓冲器设计
为实现各个功能电路板与PC104数据总线的接口,需要进行数据总线的缓冲器设计。在设计中,采用PC104的D0~D7作为系统的8 b数据总线,采用带三态输出的74LS245作为数据总线缓冲器。每个功能电路板上只用1片74LS245作为数据接口,对于多路开关量输出的I/O板, 采用74LS244并接在74LS245上,通过译码电路的输出控制信号来对74LS244进行片选;而对于 具有多路模拟量输入的A/D板,采用了74LS273与74LS245并接在数据总线上,通过译码电路的 控制信号控制74LS273的脉冲端,从而实现数据的缓冲和传输。
3.2软件设计部分
由于PC104 CPU模块支持可读写的固态盘,这种以半导体存储设备来代替通常使用的磁盘驱 动器,可以大大提高系统的可靠性,降低系统的功耗和成本。本系统中,根据固态盘的特点 ,操作系统软件采用DOS 6.22,以TuborC 2.0作为开发环境,应用程序采用C语言和汇编语言相结合来实现。
在编写软件时,首先要设置好I/O板卡的基地址,再根据基地址来确认其他外围寄存器端口地址,包括读写端口、控制字和通道选择等地址。
4、在温度控制系统中的应用
PCR温度控制仪中采用了PC104系统, PCR温度控制仪的总体结构如图3所示。
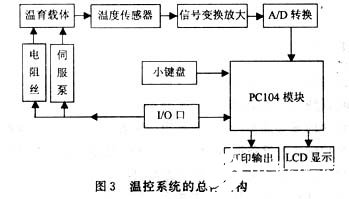
图3的机械装置主要由温育载体、冷却装置和加热装置构成。温育载体是控制对象,冷却装置为小型压缩机制冷系统和二次冷媒循环系统构成,以实现温控系统的快速降温。制冷系统处于常开状态,不断冷却二次冷媒介质,当温育载体需要降温时,低温的冷媒介质被伺服泵送入温育载体的冷却盘管,实现降温。用二次冷媒作为冷却方式是为了冷却量稳定,对制冷系统影响小;加热装置采用电阻丝作为加热元件,受执行元件(固态继电器)的开关控制 ,通过开和关次数的变化以及每次开和关的时间来控制加热量,调节温育温度。
对于该温控系统,由于制冷系统一直打开,只要对继电器的开关进行控制就可以实现对温育载体的温度控制,现控制目标是将温度稳定在某个值附近;另外,温育载体是暴露在周围环境中的,其热量散失很难计算,而且温育载体的温度场分布也不均匀,这就给控制带来了难度,故采用了模糊控制技术。系统设计了二维模糊控制器,以温度的偏差E和E的变化EC 作为控制器的输入变量,电阻丝的加热时间即继电器的打开时间T作为输出变量,并通过C 语言来实现编程。
该程序可分为2个部分,一个是计算机离线计算查询表的程序,属于模糊矩阵运算;另一个是计算机在模糊控制过程中在线计算输入变量(温度偏差和其偏差变化),并将他们模糊化处理,查找查询表后再做输出处理的程序。
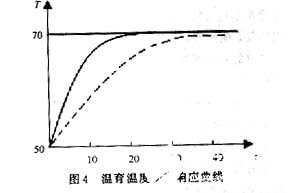
从实验的结果来看,模糊控制技术对系统的控制有良好效果。图4虚线是仅采用PID算法获得的温育载体温度的动态响应曲线,而实线是采用模糊算法的动态响应曲线。从图中可看出,温育温度的斜坡时间、控制精度和稳态误差等指标有较大的提高,获得了较好的效果。
5、结语
由于PC104的高集成度和模块化的特点,使得在开发周期和开发工具上比其他的开发模式有一定的优势,也为温控系统提供了一个方便的嵌入式平台。针对不同的控制系统和控制要求,用户只要编写不同的控制算法就可以实现。
责任编辑:gt
-
探究PC104的某型航空发动机排气温度测试系统2021-06-12 4053
-
基于PC104总线实现的ADT-834运动卡控制卡的特性分析2020-03-20 2679
-
怎么设计基于PC104总线的实时信号采集处理系统?2019-09-27 4164
-
使用VHDL语言和FPGA的DSP HPI口与PC104总线接口设计2019-05-07 2449
-
一文带您熟悉pc104故障监控平台2017-11-06 11314
-
CPLD控制PC104总线时序问题2013-07-22 3606
-
想用labview控制pc104采集卡,调用dll无法对端口进行初始化2012-09-13 3863
-
基于PC104总线的故障诊断装置的设计2011-08-30 9366
-
基于PC104的导弹随动装置检测系统设计2011-07-12 998
-
PC104串口通信在工程中的应用2011-04-15 1292
-
单片机温度采集器与PC104分站的串行通信2009-12-03 911
-
Windows CE下PC104模块与MCS51单片机串行通2009-11-28 706
-
PC104 模块与通用并行接口(GPIB)通讯的实现2009-08-13 1158
-
一种基于PC104 的弹簧分选控制系统设计Design of2009-06-01 651
全部0条评论

快来发表一下你的评论吧 !
