

在电路设计中驱动器与接收器的选择解决方案
描述
大多数电子系统的核心是一个用于处理数字输入以产生增值输出的处理器。选择合适的处理解决方案常常是系统决策的第一步。
紧随处理器选择之后的是选择正确的驱动器与接收器。本文着重介绍选择这些器件时的考虑因素。
要求规范
在选择一种处理器时,人们常常关心的是时钟速度、存储器及MIPS。但对于驱动器与接收器来说,还必须规定拓扑、信号传输速率与距离、以及功耗与互换性。
拓扑是指互连的节点数量。大多数基本拓扑都是包括一个驱动器与一个接收器的点对点(单工)拓扑。由于驱动器与接收器之间的路径不复杂,因此单工可提供最高的信号质量。设计者常常用带单工接口的时钟分配树来提高信号完整性。当接口速率高于数百Mbps时,单工架构也是一种较好的选择。RS-232及 LVDS (TIA/EIA-644) 即为单工标准。
多路及多点为复杂程度更高的驱动器/接收器拓扑。多路是指一个驱动器与多个接收器通信。超过一个接收器时需采用主总线分出的抽头。这些抽头会产生不连续,从而使信号质量下降。LVDS (TIA/EIA-644-A) 最近经过改进后可支持多路工作。
多点架构拥有多个与一个(或多个)接收器相连的驱动器。当总线上有多个节点需要成为活动发射器时,即选择多点架构。工控应用可能拥有互连的多个电机、传感器与处理器,需要共享速度、位置及温度信息以便处理器发出正确的扭矩与位置命令。RS-485及M-LVDS即为两项多点工业标准。
规定拓扑后,即必须规定信号传输速度。时钟信号以MHz表示,而数据传输则以Mbps表示。乘以2即可将以MHz表示的时钟速度转换成以Mbps表示的数据传输速率。
传输距离是另一项重要参数。很多驱动器与接收器都专门针对短距离应用而设计。这些限制源自于所采用的信号传输(单端比差分)、电压电平与接收器的共模电压范围。
信号传输速率与传输距离之间存在着倒数关系。对于大多数器件来说,信号传输速率会随距离增加而减小。这种倒数关系是由于存在符号间干扰 (ISI)。电缆及其腐蚀会滤掉从驱动器出来的信号的陡峭边缘,从而导致在线的另一端引起干扰的单独位脉冲。这种ISI可量化为抖动。抖动幅度随距离增加而增加。假设可接受抖动的幅度恒定(以位周期的百分比表示),则很容易了解这种倒数关系。
其他需考虑的参数包括功耗与互换性。需要规定器件在加载条件下所消耗的电流。当有替代解决方案时,通常选择功耗较低的解决方案。互换性是指标准器件以及公共占板面积或引脚。标准器件通常优于专用解决方案。标准接口允许设计不同的子系统,并能进行平滑集成。标准器件与公共占板面积可确保原有器件与替代器件的互换性。
器件选择
可用驱动器与接收器的选择相当困难。但幸运的是,可迅速缩小可行解决方案的范围。首先采用拓扑,必须了解,单工、多路及多点器件代表着更高的可用性,故可在单工或多路应用中使用多路器件。反之未必正确,虽然也可用多点器件来解决单工、多路及多点问题,但此时须考虑最大信号传输速率。试图实现一种Gbps的多路系统将很可能失败。多路与多点设计通常会限制在数百Mbps数据速率上。
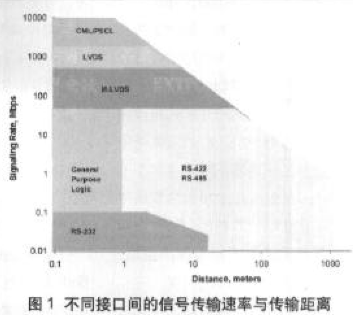
在多种替代器件间进行选择时,必须同时最佳地考虑信号传输速率与传输距离。图1显示不同器件的信号传输速率与传输距离。如图1所示,信号传输速率随距离增加而减小。从左下角开始,通用、单端逻辑(BTL、GTL及GTLP)可以高达50 Mbps的速率提供小于1米的覆盖距离。当传输距离较长时,则需要使用更为稳健的驱动器。对于速率小于100 Kbps及距离长达20米的数据传输,可采用RS-232器件。RS-232器件为单端输入并采用大电压摆幅,因而可获得更高的传输功率。
当设计要求传输距离大于1米及传输速率高于100 Kbps时,需采用差分信号。要想使单端信号速率大于100 Kbps,则需要有很陡的驱动器斜率。差分信号具有内在的噪声抑制(由于接收器共模噪声抑制),因此允许有更小的电压摆幅。RS-422(多路)及RS-485(多点)可以50 Mbps的速率工作,并能在更低的速率上达到大于1公里的传输距离。如果要求有更高的传输速率,可使LVDS器件在数Gbps速率上工作。LVDS采用小差分信号,这种信号允许进行更快的开关,但将传输距离限制在数十米以内。LVDS的变体——M-LVDS,可提供高达500 Mbps的数据速率,并将LVDS的适用范围扩展至多点及重负载背板。
随着传输速率超过2 Gbps,可用解决方案包括PECL及CML器件。这些器件继续确立了高速信号传输的标准,但要求有更高的负载电流。
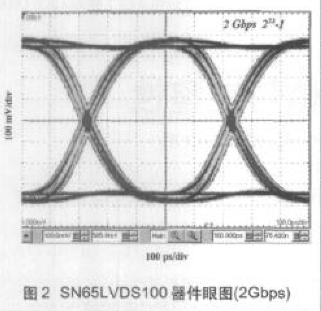
最后请注意图1中的几点。首先,可使用速度较高及传输距离较远的器件来解决低速率及短距离问题。可将LVDS解决方案用于在背板4英寸范围内分配1 MHz的时钟——正如RS-422或RS-485一样。LVDS解决方案较低的电磁辐射常使其成为解决这种问题的首选方案。在考虑器件信号传输速率时,重要的是须注意,最大信号传输速率可能需要根据最小可接受参数质量(如输出电压、过渡时间及抖动等)来确定。标准虽未给出这些参数间的关系,但可运用经验。为保证最佳工作,当用随机数来测试时,过渡时间应限制为小于位时间的50(,器件抖动则应限制为位时间的10-20(。这些经验有助于在系统级保证有充分的信号电压与时序余量。图2为遵循这些建议的SN65LVDS100 (2 Gbps LVDS转发器)器件眼图,其中输入为2 Gbps随机数,输出抖动为55 ps(源抖动为25 ps),而过渡时间则为160 ps。
驱动器功耗与信号电压有关。RS-485拥有+/- 2V的摆幅,而M-LVDS则拥有+/- 0.6 V的摆幅。例如,在一个要求以10 Mbps速度及10米距离进行多点传输的设计中,采用M-LVDS及 RS-485均可。对于单通道工作,较好的选择是SN65MLVD201 及 SN65HVD20。这两种器件可提供同样的占板面积、遵循标准并满足指标要求。在使用SN65HVD20时,所需功率为使用SN65MLVD201时功率的四倍。SN65HVD20中的额外功率用来产生一个电压更高的信号。尽管这种应用可能不需要这么大的功率,但当传输距离超过10米时会很有用。事实上,SN65HVD20允许以高于1 Mbps的速率进行信号传输,且传输距离可增加至500米。
结语
选择最佳驱动器与接收器是一项关键决策。通过明确地确定系统要求,设计者可在各种选择之间进行挑选。而像通道数、电源电压及ESD保护等其他规范,则使设计者能获得一组足以解决问题的器件。
责任编辑:gt
-
Micrel SY58016L:高速CML驱动器与接收器的理想之选2026-04-08 289
-
德州仪器高速差分线路驱动器与接收器解析2026-03-16 313
-
SN65LVDSxxx 高速差分线驱动器和接收器详解2025-12-31 3083
-
MAX207:5V多通道RS - 232线路驱动器/接收器的全面解析2025-12-30 498
-
探索TRSF3223E:高性能RS - 232线驱动器与接收器的卓越之选2025-12-27 1083
-
RS-232线路驱动器和接收器MAX3232EI资料2021-12-27 1223
-
电机驱动器解决方案以及从分立元件构建驱动器2021-12-22 2344
-
LTC490:差分驱动器和接收器对数据表2021-05-26 1059
-
LTC1690:差分驱动器和接收器对,带故障安全接收器输出数据表2021-04-19 996
-
双通道微型模块接收器子系统在紧凑型封装中兼有高速 ADC 和驱动器2021-03-21 817
-
isoPower解决方案在电路设计中的应用2019-07-12 3496
-
微型双模无线接收器解决方案含设计文件2018-12-03 2781
-
差分驱动器和接收器兼容问题2018-10-21 2998
-
驱动器/接收器,驱动器/接收器原理是什么?2010-03-08 2269
全部0条评论

快来发表一下你的评论吧 !
