

使用极海APM32M3514无感FOC控制方式快速调转电机
描述
《APM32芯得》系列内容为用户使用APM32系列产品的经验总结,均转载自21ic论坛极海半导体专区,全文未作任何修改,未经原文作者授权禁止转载。
1. 概述
定义:FOC是一种通过解耦电机定子电流的磁场分量(d轴)和转矩分量(q轴),实现高性能电机控制的技术。
核心目标:模拟直流电机的控制特性,实现交流电机的高效、低噪、宽调速控制。
别名:矢量控制(Vector Control)。
2. 无感FOC核心原理
磁场定向:将三相电流(ABC坐标系)通过坐标变换分解为:
d轴电流(Id):产生磁场的分量(励磁分量)。
q轴电流(Iq):产生转矩的分量(转矩分量)。
坐标变换:
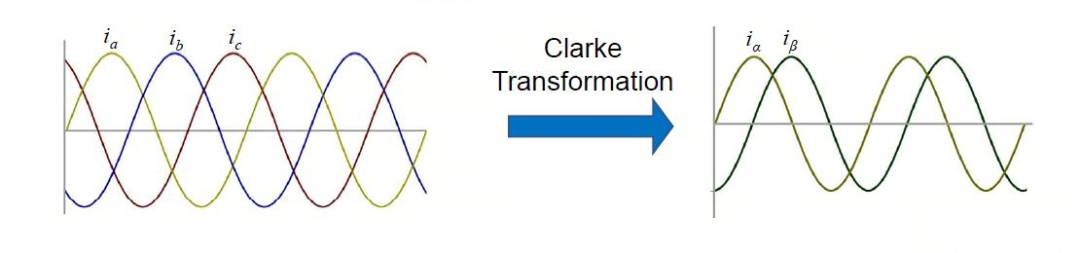
Clark变换:三相静止坐标系(ABC)→ 两相静止坐标系(αβ)。
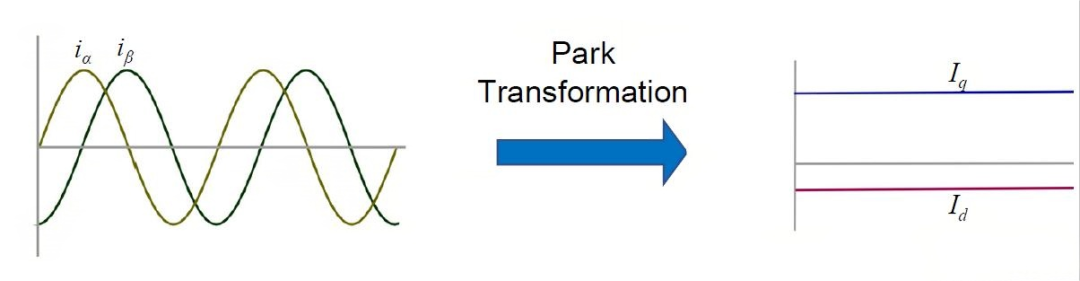
Park变换:两相静止坐标系(αβ)→ 旋转坐标系(dq,与转子磁场同步)。
逆变换:将控制后的dq轴信号还原为三相电压信号(逆变器驱动)。
3. 关键步骤
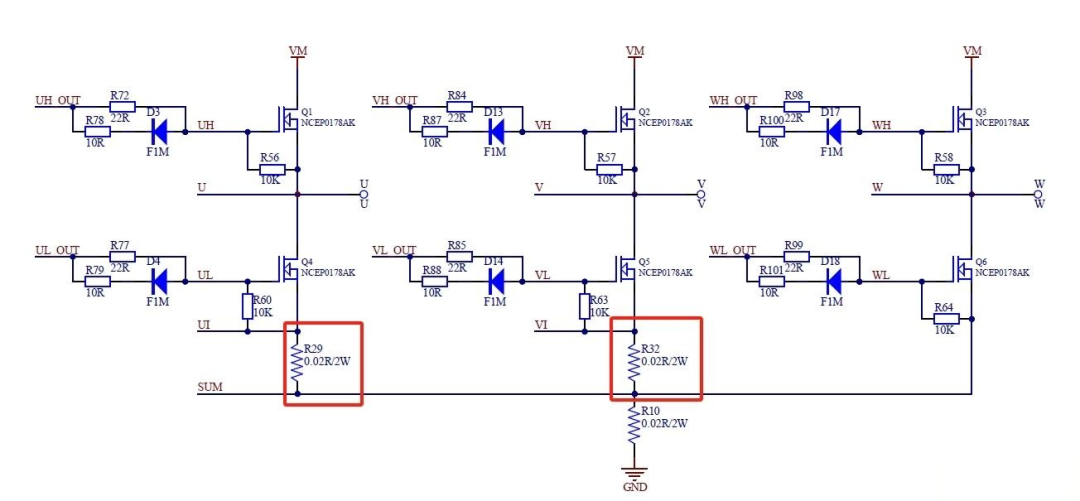
1. 电流采样:测量电机三相电流。一般有单电阻,双电阻和三电阻三种电流检测方式进行测量。APM32M3514_MOTOR EVAL使用R29、R32双电阻进行U、V两相电流采样,通过计算得到W相电流。
2. 坐标变换(Clark + Park):
依赖转子位置信息电角度(编码器、霍尔传感器或无传感器估算)。APM32M3514使用SMO+PLL方式获取转子位置。
Clark变换:通过Clarke变换将测得的电机相电流Ia,Ib,Ic转换为αβ参考坐标系中的两个正交分量Iα和Iβ。
Park 变换:使用估算的转子磁通角通过Park 变换将αβ转换为dq参考坐标系中的两个正交分量。
3. PI控制:
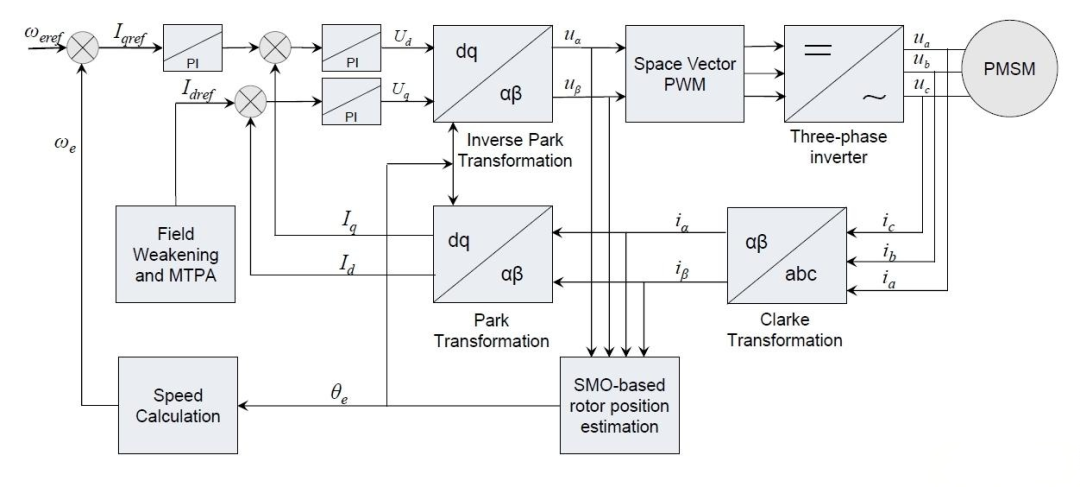
独立控制Id(通常设为0以实现最大转矩)和Iq(响应转矩需求)。由上图可以明显得到电流环目标Iqref是由速度环PI控制的到的结果,以滑膜观测得到的速度与设定的目标转速进行误差运算得到。Id一般在不考虑MTPA和弱磁算法时,一般输出给定为0。
4. 逆Park变换 + SVPWM:
将dq参考坐标系中的校正电压转换回abc参考坐标系中的电压。通过一些功率切换技术将这些电压施加到电机端子,生成逆变器开关信号。
空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)是驱动两级电压源逆变器的传统技术,具有以下优势:
• 改善相电压的谐波内容
• 将直流总线利用范围提高约15%
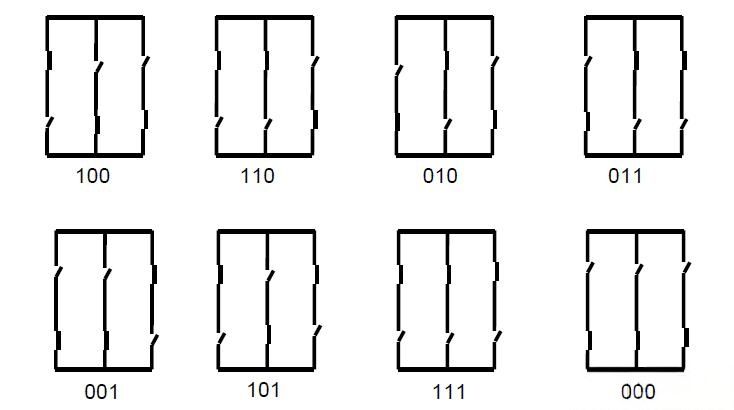
逆变器每相输出可以是两种状态中的任一种:连接到负电源轨时为0,连接到正电源轨时为1。因此,三相逆变器可以有23 = 8 种可能的状态,如下图所示:
5. 转子位置反馈:
有传感器:编码器、旋变。
无传感器:滑模观测器(SMO)、模型参考自适应(MRAS)、高频注入(HFI)。
滑模观测器(SMO)是一种非线性观测器,用于根据测得的输入和输出估算可观测系统的内部状态。在此应用中,SMO 用于估算PMSM 的反电动势。与传统线性反电动势转子位置和速度估算相比,使用SMO 的主要优势在于,当存在未知信号和不确定性时,SMO 的稳健性极高
想具体了解滑膜观测器如何实现,可参考这份博客:https://zhuanlan.zhihu.com/p/416224632
4. 优势
高性能:宽调速范围、快速动态响应(如零速满转矩启动)。
高效率:最小化铜损和铁损。
低振动/噪音:平滑转矩输出。
兼容性:适用于永磁同步电机(PMSM)、无刷直流电机(BLDC)等。
5. 挑战与解决方案
依赖转子位置:
传感器成本高 → 无传感器FOC。
低速精度差 → 高频注入法。
参数敏感性:电机参数(电阻、电感)变化影响性能 → 在线参数辨识。
计算复杂度:需实时处理坐标变换和PID → 高性能MCU(DSP)。
6. 对比其他控制方法

7. 总结
无传感器FOC:降低成本,提高可靠性。
AI优化:自适应PID参数整定。
集成化:SoC 简化开发。
原文地址:https://bbs.21ic.com/icview-3461244-1-1.html?_dsign=ac52e11b
或点击下方 阅读原文 跳转
-
CW32F030C8T7永磁同步电机无感FOC控制的方案2025-12-03 245
-
无感FOC控制原理2025-02-27 618
-
基于Geehy极海半导体APM32M3514电机通用评估板使用介绍2024-11-28 1712
-
极海APM32M3514斩获“2024年度电机控制器十大主控芯片”奖2024-11-23 1911
-
极海半导体推出APM32M3514系列电机控制专用SoC2024-10-12 1963
-
电机产品线上新 极海APM32M3514电机控制专用SoC2024-10-09 1172
-
正式发布丨极海首款电机控制专用微控制器APM32F035,助力用户产品快速迭代焕新2023-07-31 1613
-
无感FOC方案原理机器控制难点分析2023-07-13 7845
-
笙泉BLDC MCU: 应用于FOC无感控制2023-05-08 1141
-
无感FOC电机控制视频2022-04-06 19683
-
无感FOC的控制原理详细资料说明2020-08-25 6629
-
无感FOC 控制视频2020-06-02 2252
-
无感FOC 电机控制视频2020-04-27 3436
-
小米平衡车无感FOC控制?2016-01-13 13266
全部0条评论

快来发表一下你的评论吧 !
