

安徽京准:PTP时钟同步精准赋能AI机器人
描述
安徽京准:PTP时钟同步精准赋能AI机器人
核心概念:什么是PTP?
PTP 的全称是 精确时间协议 ,其标准是 IEEE 1588 。它的设计目标是在局域网内,使分布式系统中的所有时钟达到亚微秒级的高精度同步。
- 类比 :你可以把它想象成一个高度精确、数字化的“对表”系统。所有设备(主机器人、从属关节、传感器、相机等)都遵循同一个“心跳”,而不是各自为政。
- 与NTP的区别 :常见的网络时间协议(NTP)通常在互联网上提供毫秒级同步。PTP则为工业以太网设计,通过硬件时间戳和精密算法,能达到纳秒到微秒级的同步精度,这对于需要严格时序控制的运动至关重要。
为什么人形机器人需要PTP时钟同步?
人形机器人是一个极其复杂的 多轴、多传感器实时系统 。想象一下它有:
- 数十个关节伺服驱动器 (电机+编码器+控制器)。
- 多个视觉传感器 (双目相机、深度相机、事件相机)。
- 力/力矩传感器 。
- IMU 。
- 主控大脑 (通常是一台或多台计算机)。
PTP时钟同步对这些组件至关重要,原因如下:
- 协同运动与全身控制 :
当机器人执行一个连贯动作(如行走、抓取)时,所有关节电机需要在完全相同的时刻接收到新的位置/扭矩指令。
如果各关节时钟不同步,指令到达时间有微小差异,会导致动作“卡顿”、不流畅,甚至失去平衡。PTP确保所有驱动器在同一个控制周期内动作。
多传感器数据融合 :
视觉-惯性融合 :为了准确定位和建图,来自相机(视觉)和IMU(惯性)的数据必须在时间上严格对齐。如果时间戳不同步,融合算法会产生严重误差。
多相机立体视觉 :双目或多目相机的图像必须在同一瞬间捕获,才能进行精确的立体匹配和深度计算。
力控与视觉结合 :例如“眼看手抓”,需要知道“看到物体”的瞬间和“施加力”的瞬间之间的精确关系。
事件驱动系统的基石 :
人形机器人越来越多地使用 事件相机 。这种相机不是按固定帧率输出,而是当像素亮度变化时才异步输出“事件”。要理解这些来自不同传感器的异步事件流,一个全局、统一、高精度的时间基准(由PTP提供)是必不可少的。
分布式控制系统架构 :
现代机器人常采用分布式控制,计算任务分布在主控计算机和关节级的智能驱动器上。PTP确保这些分布式计算单元在相同的时间参考下运行,使预测、规划和控制的闭环稳定。
AI机器人
PTP在人形机器人系统中的工作原理
- 网络架构 :
- 所有设备通过支持PTP的以太网交换机连接。
- 网络中选举出一个 “最佳主时钟” 。通常,主控计算机或专用的PTP grandmaster设备担任此角色。
- 同步过程 (简化版):
- Sync报文 :主时钟定期发送带有预估发送时间的Sync报文。
- Follow-Up报文 :主时钟随后发送Follow-Up报文,其中包含Sync报文的 精确发送时间戳 (硬件生成)。
- Delay_Req和Delay_Resp报文 :从设备向主时钟发送Delay_Req报文,并记录发送时间。主时钟回复Delay_Resp报文,包含收到Delay_Req的精确时间。
- 计算与校正 :通过这四次报文交换,从设备可以计算出:
- 与主时钟的偏移量 。
- 网络链路的传输延迟 。
- 从设备根据这些计算,持续调整自己的本地时钟,使其与主时钟保持同步。
- 硬件支持 :
- 要达到微秒级精度,需要网络接口卡、交换机和设备控制器支持 PTP硬件时间戳 。这意味着在物理层(PHY)或MAC层生成时间戳,绕过了操作系统和软件栈带来的不确定延迟。
典型人形机器人系统中的PTP部署
以特斯拉Optimus或波士顿动力Atlas为例(概念架构):
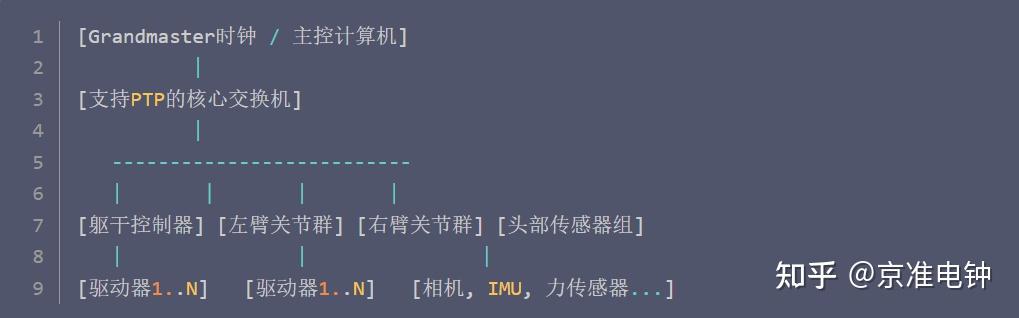
- 主时钟 :可能是机器人的主计算机或专用的时钟卡。
- 从时钟 :
- 每个关节的 伺服驱动器 。
- 每个相机的控制器。
- IMU模块。
- 力传感器接口。
- 所有设备都运行PTP协议客户端,从同一个主时钟同步。
技术挑战与考虑
- 网络拓扑与延迟 :交换机必须支持PTP透明时钟,以补偿报文在交换机内的驻留时间。菊花链或星型拓扑需精心设计。
- 时钟稳定性 :设备本地时钟(通常为OCXO或TCXO晶振)需要有良好的短期和长期稳定性,以减少同步抖动和频繁校正。
- 资源开销 :对于计算资源有限的关节控制器,运行PTP协议栈和进行时钟调整需要一定的CPU和内存资源。
- 启动与重同步 :系统上电时,所有设备需要快速收敛到同步状态。网络拓扑变化或主时钟切换时,需快速恢复同步。
总结
对于人形机器人而言, PTP时钟同步不是“锦上添花”,而是“神经系统”的基准心跳 。它:
- 确保了数十个关节像一个整体那样协同运动。
- 赋予了眼睛(相机)、小脑(IMU)和皮肤(力传感器)在时间上“说同一种语言”的能力。
- 是实现高速、高精度、动态平衡和复杂操作 的基础设施级技术 。
没有高精度的全局时间同步,构建一个能在动态环境中可靠工作的先进人形机器人几乎是不可能的。随着机器人向更复杂、更高速、更集成的方向发展,PTP的作用将愈发关键。
审核编辑 黄宇
-
安徽京准 | PLC时钟同步(NTP网络时间服务器)的重要性2024-06-19 1459
-
GPS北斗双系统:卫星时钟同步 卫星对时装置-安徽京准2024-07-15 2222
-
时间频率设备 时钟同步 赋能机场系统-安徽京准2024-08-06 1374
-
京准电钟解读:PTP时钟同步系统及应用是什么?2024-10-31 1791
-
子母钟系统,安徽京准助力高考精准时钟2025-03-14 1052
-
安徽京准GPS北斗时钟服务器的应用及分析2025-03-26 1146
-
安徽京准:NTP校时服务器精准同步的可靠选择2025-04-18 801
-
安徽京准:北斗卫星同步时钟的安装与调试详解2025-06-05 1928
-
北斗时间同步系统:安徽京准提升数据网络精准度2025-06-12 1736
-
双北斗卫星时钟同步装置:安徽京准自主可控的“时序”守护者2025-09-05 1476
-
数据堡垒:京准1588PTP主从时钟系统构建精准世界2025-10-29 729
-
安徽京准:NTP校时服务器赋能智慧水务监管优化2025-11-26 606
-
医院NTP子母钟系统:安徽京准赋能医疗行业精准时序2026-01-06 567
-
安徽京准:1588PTP授时服务器助力工业信息化建设2026-01-26 419
-
双北斗卫星时间同步系统升级改造,安徽京准赋能智慧电力2026-05-25 146
全部0条评论

快来发表一下你的评论吧 !
