

ABB工业机器人DSQC1030新I/O配置介绍
电子说
1.4w人已加入
描述
1)ABB新机器人逐渐开始使用DSQC1030(如下图)代替原有DSQC652IO版
2)该硬件使用Ethernetip协议。机器人不需要额外配置选项。如果机器人需要做主站连接其他Ethernetip从站或者机器人做Etherneti从站连接其他设备主站,仍需要购买选项841-1Ethernetip Scanner/Adapter
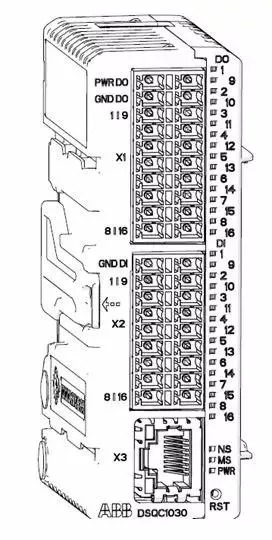
3)硬件连接:
出厂会默认把X5网口(设备底部)和控制器X4 LAN2口上
硬件最上端的x4为设备供电,默认已经从xt31引电过来
X1为输出,其中PWR DO和GND DO为DO的24v和0v,需要单独接电(也可从XT31引电),相当于之前DSQC652的9和10针脚
X2为输入,其中GND DI为DI的0v,需要单独接线(也可从XT31接线)
4)第一次开机后,系统会自动识别硬件,给出提示
5)根据提示配置,完成配置后就自动分配16di和16do
6)如果开机错过配置提示,也可进入控制面板-配置-Ethernetip Device,添加
模板选择ABB LOCAL I/O,地址192.168.125.100
7)后续添加signal,方法和之前类似,所属设备选Local IO
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ABB IRB5400-喷涂工业机器人2015-01-14 10132
-
零基础玩转工业机器人2018-10-29 5017
-
青岛ABB工业机器人无法正常进入系统故障维修2020-07-16 2048
-
ABB机器人维修保养指南2020-08-19 6019
-
ABB机器人驱动器相关故障维修型号有哪些?2020-10-10 2175
-
ABB机器人实训平台实验2021-07-01 2759
-
工业机器人仿真与编程2021-09-07 2415
-
ABB工业机器人的基础教课2015-12-23 1664
-
ABB机器人的CCLink配置详细资料说明2020-03-24 5565
-
ABB机器人线速度_青岛ABB机器人发生电源故障维修2022-01-11 2403
-
仿真技术入门与实训项目四ABB机器人I/O配置2022-08-24 829
-
基于DSQC652信号板的机器人信号配置2023-05-11 3470
-
ABB机器人I/O板信号设定步骤简析2023-08-12 5119
-
abb工业机器人的编程语言是什么2024-06-16 7455
-
abb机器人的基本配置包括哪些2024-06-17 3695
全部0条评论

快来发表一下你的评论吧 !
