

导航系统的电磁干扰途径和抗干扰的方法介绍
描述
1.引言
卫星导航系统由于具有覆盖范围广、传输质量好、部署迅速、组网方便、通信系统投资几乎与通信距离无关、通信可到达地点几乎不受地理环境条件限制等特点,在军事和民用上都具有特别重要的实用价值。但卫星导航通信受自身特点的限制和环境的影响,不可避免地存在各种干扰,尤其是其开放式的系统,使用透明转发器,更容易受到一些不可预见的恶意干扰。未来卫星导航系统面对越来越复杂的电磁环境如何抗干扰,提高系统自身的抗干扰能力和抗摧毁性,这个问题值得我们认真思考和研究。
2. 卫星导航系统的干扰途径
卫星导航系统的干扰平台包括地基、空基和天基干扰平台。地基干扰平台的特点是目标寻找较容易、成本低、对卫星干扰时高频段干扰受限;空基干扰平台的特点是机动性好、寻找容易、对卫星干扰时高频段干扰也受限;天基干扰平台的特点是可通过备份卫星对主用卫星进行干扰、机动性差、成本高、对地面系统干扰时高频段受限。
从干扰的目标对象来说,干扰有以下几种:
(1)对遥测遥控信号的干扰
采用较大功率的干扰设备,对卫星的遥测遥控信号进行干扰,从而破坏卫星正常遥测遥控信号的传输(上、下行)。此外,还可干扰导航信号、数传信号以及通信转发信号。
(2)对透明式转发器的干扰
只要干扰信号的功率足够大(大于其工作门限)就可以将透明式转发器推入饱和,使信噪比严重下降,从而破坏卫星导航系统的正常工作。
(3)对硬限幅式转发器的干扰
如果卫星导航系统采用了硬限幅式转发器,则大信号对小信号有抑制作用,且存在互调,特别是在系统中尤为重要。利用这一特点,采用大幅度的干扰信号就可以使正常信号严重失真从而无法接收。
(4)对猝发信号的干扰
指干扰对系统正常信号的快速截获与及时干扰。
3.抗干扰技术
目前,针对卫星导航下行信号的抗干扰方法主要有以下三种:
(1)基于时频(时域、频域或时频结合)信号处理的抗干扰方法,通常称为时域抗干扰方法;
(2)基于空域信号处理的抗干扰方法,又称为自适应天线或智能天线抗干扰方法;
(3)基于空时信号处理的抗干扰方法,即将空域和时域抗干扰方法组合起来;
(4)GPS/INS组合导航抗干扰方法。
3.1 时域抗干扰方法
时域抗干扰方法中采用的干扰抑制算法主要有时域干扰抑制算法和变换域干扰抑制算法两种。时域干扰抑制算法通常采用自适应滤波技术来实现,自适应滤波技术在均方误差最小(MMSE)意义下估计出干扰信号并从输入信号中对消掉,可有效抑制相对带宽小于5%的干扰信号。时域抗干扰方法原理如图1所示。

在变换域干扰抑制算法中,较常用的是频域干扰抑制算法。利用DFT或FFT算法变换到频域上,再利用信号与干扰频谱特性的差异,将干扰信号谱成分从接收信号谱中剔除。这个过程中一般采用的是频域加权矢量法,根据输入信号的功率谱密度确定干扰频带所在的位置,并对被干扰的信号频谱进行加权处理,抑制掉干扰频谱。在频域干扰抑制算法中,为了减少数据截断所引起的频谱泄漏,需采用旁瓣电平较小的数据窗来减小频谱泄漏。但是,数据加窗又将会使信号产生失真,引起信噪比的下降。
从干扰抑制能力上看,频域干扰抑制技术可以抑制信号带宽(一般认为相对带宽小于10%)大于自适应滤波干扰抑制技术可抑制的带宽,但实现复杂性大于自适应滤波干扰抑制技术。
另外,时域干扰抑制算法会引入额外的算法时延,这种时延将作为导航信号的传输时延。对于无源定位体制而言,干扰抑制算法时延可视为用户接收机钟差的一部分,通过伪距观测和定位解算可以计算出用户机钟差,并得到精确的用户位置,也就是说这个时延不会影响用户的定位精度。相反,频域干扰抑制技术通常在频域上对信号进行实数处理,对应到时域上是相当于利用系数关于中心抽头共轭对称的复系数滤波器对信号处理,可以保证滤波器的线性相位特性,很容易消除算法时延的影响。
虽然频域干扰抑制算法比较容易消除算法时延的影响,但由于干扰抑制的同时改变了输入伪码信号特性,使得接收机伪码信号与本地伪码信号特性不一致,从而使得接收信号失配,导致相关峰畸变。
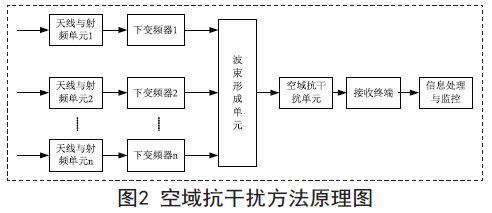
3.2 空域抗干扰方法
空域抗干扰方法即智能天线抗干扰方法,常见的有自适应调零技术和多波束天线两种。
适应调零技术的原理即采用多点布设干扰站的方法,当干扰站数量大于调零天线的调零个数或波束数量,并分布在波束内时,干扰就会奏效。另外,若采用多个干扰站相互配合实施间断闪烁干扰,使其无法形成指向干扰的天线方向图,从而起到破坏这种抗干扰方法的作用,实施有效干扰。目前比较成熟和应用广泛的抗宽带干扰技术是基于自适应调零技术,如美国雷声公司研制的抗干扰GPS接收机,它采用了5个阵元的自适应调零天线,用于下一代的“战斧”导弹BlockIV.而抗窄带或单频干扰的方法主要有空时联合或频域滤波,这种方法可以抑制多种干扰,它可以在不增加阵元的前提下,大大增加阵的自由度,在阵的设计上,也为最优准则的选取提供了更大的余地。然而,空时处理在提高抗干扰能力的同时也会使计算量显着增加。
多波束天线即用波束形成网络向阵列单元激励所需的信号振幅和相位,产生多个锐波束,然后通过波束的叠加来产生特定形状的成形波束覆盖特定区域,从而提高卫星导航系统的抗干扰能力。而且,多波束天线可以实现一对多的通信,地面控制系统可采用多波束天线实现多颗卫星星历的同时注入。
自适应调零天线利用敌我双方信号在振幅、频率和空间方位的不同,通过对天线各阵元进行自适应加权处理,自动控制和优化天线阵的方向图,在干扰源方向上产生深度调零,使信号收到的干扰最少,调零深度一般可以达到25dB~30dB.它能有效抑制宽带干扰、窄带干扰、同频干扰和邻道干扰等不同形式的干扰。
3.3 空时自适应抗干扰方法
空时自适应算法经历了4个阶段的演变:第一阶段(上世纪50年代中期到60年代末期),是基于梯度算法的空间一维处理;第二阶段(70年代初期到70年代中期),在多天线阵元上采用时间快拍,真正实现了空时二维自适应处理,可处理宽带信号,但算法仍基于梯度算法;第三阶段(70年代中期到80年代中期),采用采样矩阵求逆的算法,可达到更快的收敛速度;第四阶段(80年段中期至9 0年代中期),针对大维数系统,重点在于降低处理自由度(DOF),即降维处理,可同时降低运算量及提高收敛速度。其中最具有代表性的方法有Tufts等提出的主成分法,Goldstein和Reed提出的互谱度量法和多级维纳滤波。近年来提出的波束控制盒波束成形除了在干扰来向形成深陷以外,还在卫星信号方向形成高增益波束,在抑制干扰的同时增强卫星信号,可显着提高抗干扰能力。
空时抗干扰方法采用阵列天线(均匀圆阵或均匀线阵),利用卫星导航信号的特征完成干扰抵消,同时尽量保证信号的不失真。空时处理结构如图3所示。
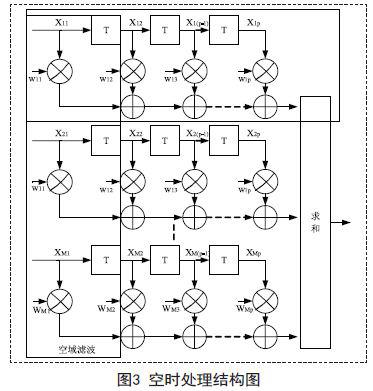
设系统空时维数M ? P,每个时间延迟单元的时间延迟为T ,W 为空时权矢量。联合空时处理的输入向量 X = S + n ( S 为信号, n 为噪声)。
在平稳条件下,联合空时处理的标量输出为:
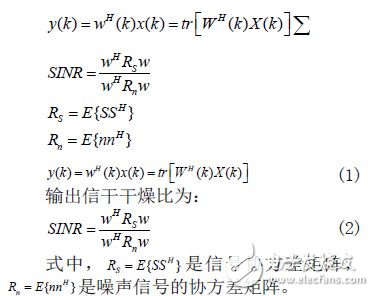
基于同一时间延迟节点,各阵元共同起到的作用相当于空域的自适应滤波,可以分辨空间干扰源,形成空域零陷抑制空域干扰。基于同一天线阵元,各级时延相当于时域FIR滤波,根据自适应滤波原理,在时域进行干扰抵消。空时联合处理能够在空域或频域的二维平面上抑制干扰。可以近似地认为联合空时处理是把空域滤波推广到了空时域,或把时域滤波推广到了空时二维滤波。
空时自适应抗干扰技术虽然在理论上有了一定的进展,但也存在许多不足的方面,未来我们研究的方向主要是一方面对空时处理抗干扰算法的研究,主要是寻找更好的降维算法或者在原有的降维算法的基础上进行改造,目的是为了使减少运算量和实时性同步的实现。改进算法的同时也要把握好降维性能和干扰抑制性能之间的平衡,使其在通过降维方法减少运算量的同时,尽量减小其对抑制干扰能力所造成的影响。另一方面是提高工业技术,使其做出能够实时处理大量运算的处理器,来达到运用空时处理技术实时的抑制多个干扰的目的。
3.4 GPS/INS组合导航
GPS/INS组合导航定位系统是GPS系统和惯性系统组合,是将陀螺、磁力计、加速度计和GPS等有机组合以提供更加丰富精确的导航信息。该系统一方面能够突破单一设备的使用限制,另一方面使之同时具备三维定位、三维测速和姿态、方位测量能力,并且具备较强的抗干扰能力,从而成为能够提供全面信息的低成本导航方法。
组合导航系统用于武器系统的定位导航,能充分发挥两者各自优势取长补短,利用GPS的长期稳定性和适中精度,来弥补INS的误差随时间传播或增大的缺点,利用INS的短期高精度来弥补GPS接收机受干扰时误差增大或遮挡时丢失信号等缺点,并借助惯导系统的姿态信息和角速度信息,提高GPS接收机天线的定向操纵性能,使之快速捕获或重新捕获GPS卫星信号,同时借助GPS连续提供的高精度位置信息和速度信息,估计并校正惯导系统的位置误差,速度误差和系统其它误差参数,实现对其空中传递对准和标定,从而可放宽对其精度提出的要求,使得整个组合制导系统达到最优化,具有很高的效费比。
4.结束语
通过上述分析得知已有的抗干扰方法各有其技术优势和缺陷,如何有效地将各种抗干扰措施结合起来,充分发挥各自的优越性,同时降低系统的复杂度,做到多功能、小型化是今后面临的关键问题。20世纪90年代以来,各国都非常重视卫星导航系统抗干扰技术的研究与应用,我国的抗干扰技术虽然起步较晚,但也已经取得了很大进步。
-
#硬声创作季 #电磁干扰 新方法抗干扰笑君愁 2022-09-12
-
变频器系统电磁干扰的传播途径2011-11-15 2976
-
微机系统软件抗干扰的方法2022-01-20 974
-
单片机控制系统的硬件抗干扰设计2009-07-09 514
-
PLC应用系统的抗电磁干扰研究2009-08-28 467
-
PLC控制系统的电磁干扰来源和抗干扰设计2009-06-13 716
-
开关电源的抗干扰问题2009-07-11 2327
-
基于混合扩频的导航卫星抗干扰技术2012-04-12 1165
-
幅相误差对卫星导航抗干扰性能影响2012-05-28 840
-
新型卫星导航系统在半盲信道中的抗干扰研究2018-03-20 1151
-
无人机导航/飞控系统的抗干扰解决方法2020-07-31 10471
-
电磁兼容与抗干扰的详解为什么接地可以抗干扰2020-11-24 2012
-
如何提高PLC系统的抗干扰能力?2021-05-06 5741
-
PLC控制系统的抗干扰如何设计2021-12-23 1730
-
南柯电子 汽车导航系统EMC整改:从0到1构建抗干扰系统的新挑战2025-07-09 422
全部0条评论

快来发表一下你的评论吧 !
