

三电平变换器拓扑中点电压平衡控制策略与工程实现
电子说
描述
三电平变换器拓扑中点电压平衡控制策略与工程实现
BASiC Semiconductor基本半导体一级代理商倾佳电子(Changer Tech)是一家专注于功率半导体和新能源汽车连接器的分销商。主要服务于中国工业电源、电力电子设备和新能源汽车产业链。倾佳电子聚焦于新能源、交通电动化和数字化转型三大方向,代理并力推BASiC基本半导体SiC碳化硅MOSFET单管,SiC碳化硅MOSFET功率模块,SiC模块驱动板等功率半导体器件以及新能源汽车连接器。
倾佳电子杨茜致力于推动国产SiC碳化硅模块在电力电子应用中全面取代进口IGBT模块,助力电力电子行业自主可控和产业升级!
倾佳电子杨茜咬住SiC碳化硅MOSFET功率器件三个必然,勇立功率半导体器件变革潮头:
倾佳电子杨茜咬住SiC碳化硅MOSFET模块全面取代IGBT模块和IPM模块的必然趋势!
倾佳电子杨茜咬住SiC碳化硅MOSFET单管全面取代IGBT单管和大于650V的高压硅MOSFET的必然趋势!
倾佳电子杨茜咬住650V SiC碳化硅MOSFET单管全面取代SJ超结MOSFET和高压GaN 器件的必然趋势!
1. 引言
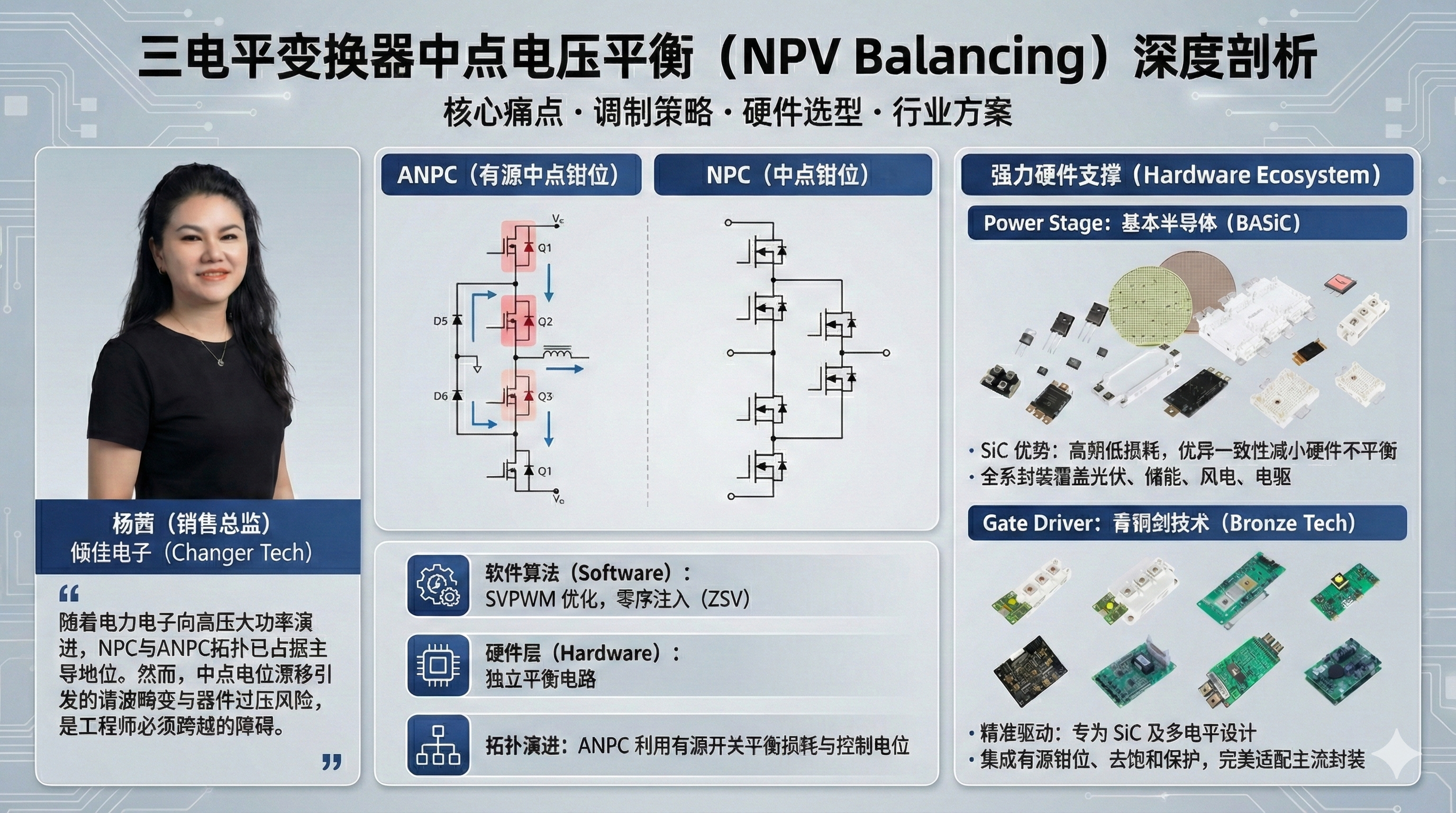
随着电力电子技术向高压、大功率和高效率方向的演进,多电平变换器拓扑已成为SST固态变压器、中高压变频调速、新能源并网发电、柔性直流输电以及电动汽车牵引驱动等领域的核心技术方案。在众多多电平拓扑中,三电平中点钳位型(Neutral Point Clamped, NPC)逆变器及其衍生拓扑——有源中点钳位型(Active NPC, ANPC)逆变器,凭借其输出电压谐波含量低、功率器件电压应力减半(相对于两电平)、电磁干扰(EMI)小以及等效开关频率高等显著优势,占据了工业应用的主导地位。
然而,三电平拓扑在带来性能提升的同时,也引入了固有的技术挑战,其中最为关键且棘手的问题便是直流侧中点电压(Neutral Point Voltage, NPV)的平衡问题。理想状态下,三电平逆变器的直流母线由两个串联的电容支撑,中点电位应严格保持在直流母线电压的一半。但在实际工程应用中,受负载工况变化、功率器件参数离散性、调制策略固有的不平衡性以及死区效应等因素影响,流入和流出中点的电流往往不为零,导致上下分压电容上的电压发生偏移。
中点电压的失衡将引发一系列连锁的恶劣后果:首先,它会导致输出电压波形畸变,增加低次谐波含量,恶化电能质量;其次,严重的电压偏移会使得部分功率开关管承受超过其额定值的阻断电压,直接威胁器件安全,甚至导致炸机事故;此外,直流侧的低频电压纹波会耦合至交流侧,引发系统振荡。因此,如何高效、可靠地实现中点电压平衡,已成为三电平变换器控制技术研究的核心课题。
倾佳电子将对三电平拓扑中点电压平衡的解决办法进行详尽的深度剖析。分析维度涵盖中点电压波动的物理机理、基于软件算法的调制策略(SVPWM、CBPWM、ZSV注入)、基于硬件电路的平衡方案(无源/有源平衡电路)、以及基于拓扑结构创新的解决方案(ANPC拓扑优势)。同时,结合基本半导体子公司青铜剑技术(Bronze Technologies)的先进驱动方案与基本半导体(BASiC Semiconductor)的碳化硅(SiC)功率模块技术,探讨工程实现中的关键硬件支撑与系统级优化策略,旨在为电力电子领域的专业技术人员提供一份兼具理论深度与工程实用价值的参考指南。
2. 三电平拓扑中点电压波动的物理机理与数学模型
要从根本上解决中点电压不平衡问题,必须首先深入理解其产生的物理机制。对于标准的三电平NPC拓扑,其直流侧由两个串联电容C1和C2构成,总直流电压为Vdc,中点O为两个电容的连接点。
2.1 中点电流的形成机制
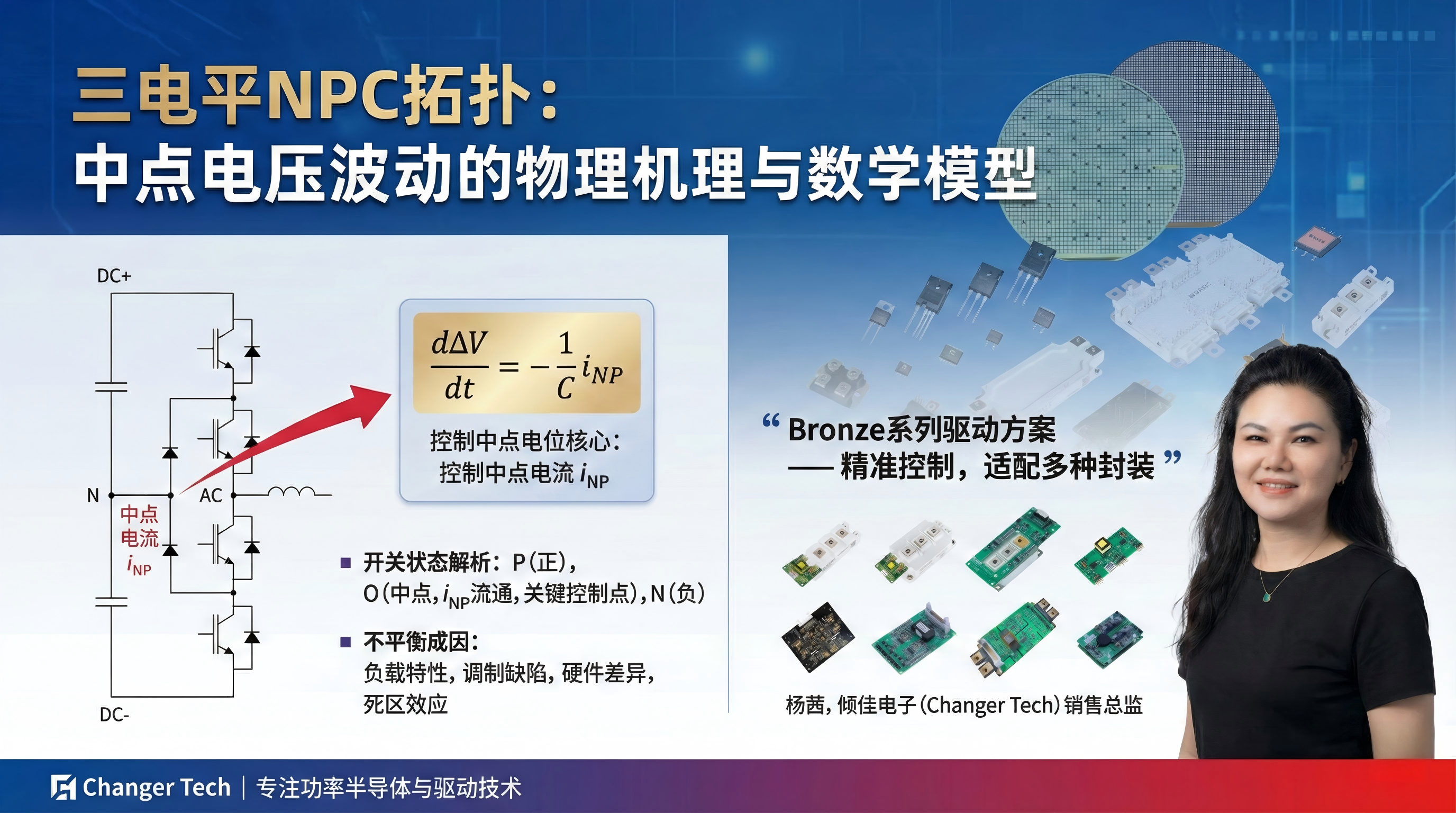
中点电位的波动本质上是由流经中点的电流iNP引起的。根据基尔霍夫电流定律(KCL),中点电流决定了上下电容电压差的变化率。假设两个电容参数一致(C1=C2=C),则上下电容电压差ΔV=VC1−VC2的动态方程可描述为:
dtdΔV=dtd(VC1−VC2)=−C1iNP
该式表明,控制中点电位的核心在于控制中点电流iNP。在三相三线制系统中,中点电流iNP是三相负载电流与开关状态的函数。三电平逆变器的每一相有三种开关状态:
- P状态(Positive):上桥臂两个开关管导通,输出端接正母线,电流不流经中点。
- O状态(Zero):中间两个开关管导通,输出端接中点,负载电流直接流经中点。
- N状态(Negative):下桥臂两个开关管导通,输出端接负母线,电流不流经中点。
因此,瞬时中点电流iNP可以表示为三相处于“O”状态时的相电流之和 [1]。如果三相开关函数定义为Sx(x=a,b,c),当Sx=0时表示O状态,则:
iNP=∑x=a,b,cδ(Sx)⋅ix
其中δ(Sx)为指示函数,当且仅当相x处于O状态时为1,否则为0。这揭示了一个关键结论:中点电位只能在逆变器输出零电平(O状态)时被控制或受影响。
2.2 造成不平衡的内外部因素
导致iNP非零均值的因素复杂多样,主要包括:
负载特性与功率因数:当负载功率因数较低时,电流与电压相位差较大,导致在某些扇区内,流出中点的电流与流入中点的电流在时间积分上无法自然抵消。特别是在长矢量作用期间,中点无电流;而在小矢量作用期间,中点电流极其显著。
调制策略的固有缺陷:传统的正弦脉宽调制(SPWM)或未加修正的空间矢量调制(SVPWM)在某些调制比下,对小矢量的分配由于对称性原因可能导致中点电荷积累。
硬件参数不对称:
- 电容参数离散性:即使标称值相同,电容C1和C2的实际容值和漏电流(Leakage Current)也会存在差异,导致静态电压漂移 。
- 器件开关特性差异:IGBT或SiC MOSFET的开通/关断延迟时间(Turn-on/off delay)以及死区时间(Dead-time)的不一致,会导致实际施加在电容上的伏秒积不对称 。
死区效应:为了防止桥臂直通设置的死区时间,会根据电流方向切削脉冲波形,这种非线性的电压误差积累也是造成中点电位低频振荡的重要原因。
3. 软件级解决办法:先进调制策略
软件平衡策略是通过改进PWM算法,主动调节中点电流的方向和大小,以补偿电容电压的偏差。这是目前工业界最主流的方案,因为它无需增加昂贵的功率硬件,仅需在控制器(DSP/FPGA)中优化代码即可实现。
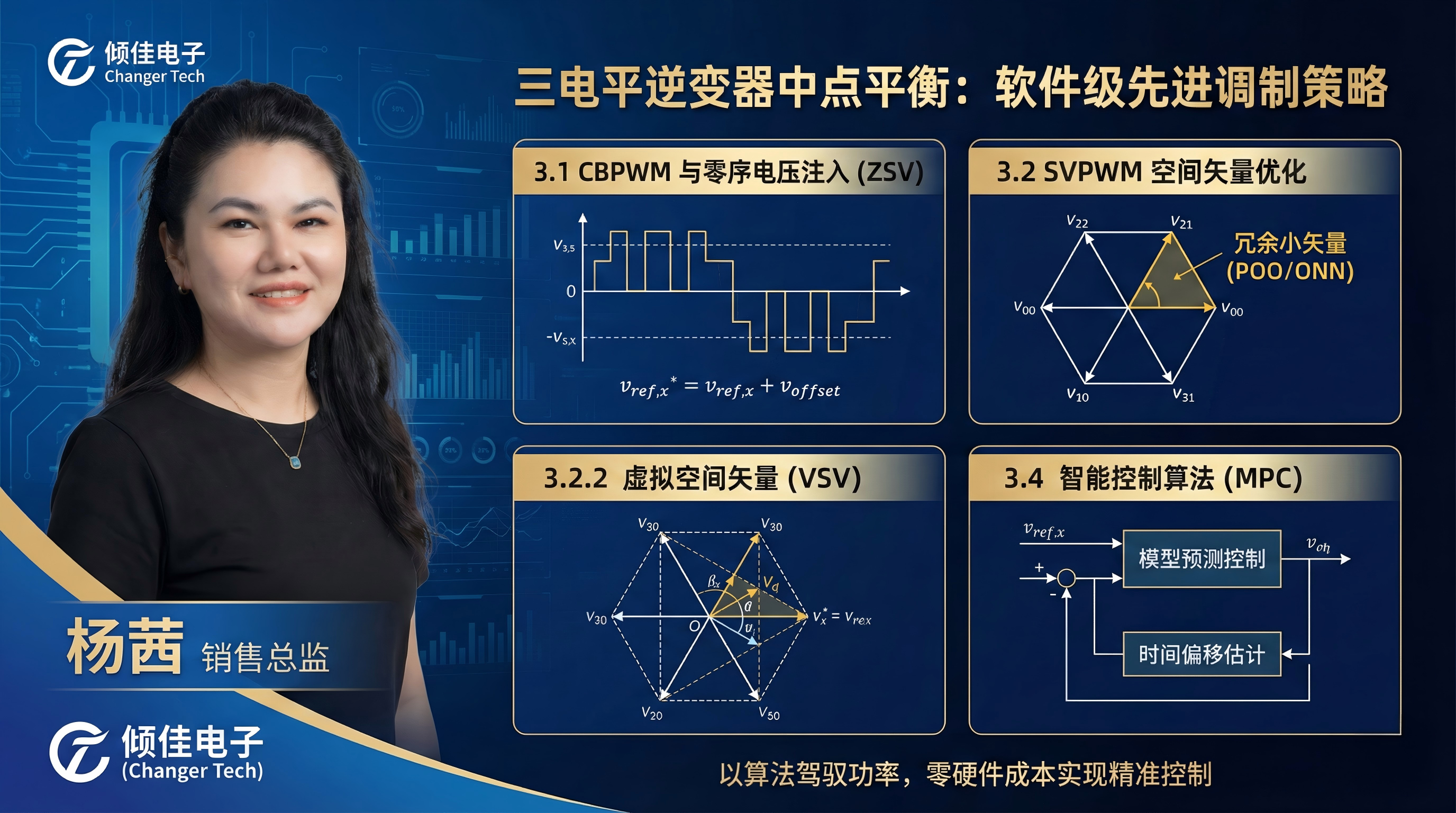
3.1 基于载波的PWM(CBPWM)与零序电压注入
基于载波的调制策略(CBPWM)因其实现简单、计算量小而被广泛采用。其核心思想是利用零序电压(Zero-Sequence Voltage, ZSV)注入技术 。
3.1.1 零序电压注入原理
在三相三线制系统中,向三相调制波中同时注入一个相同的零序分量v0,不会改变线电压输出,但会改变各相的开关状态占空比,从而改变各相接入中点的时间。
例如,若检测到上电容电压VC1偏高(即VC1>VC2),控制器需要构造一个中点电流iNP使其为正(流出中点,对C2充电或C1放电,视电流方向定义而定),从而降低VC1。
注入的零序电压voffset通常通过以下逻辑计算:vref,x∗=vref,x+voffset通过调节voffset的大小和极性,可以平移三相调制波相对于三角载波的位置,进而改变“P”状态和“N”状态的比例,间接调整“O”状态的作用时间。
3.1.2 改进型ZSV策略与重叠载波法
文献指出,传统的ZSV方法在高调制度下可能失效。改进的方法包括建立中点电压闭环控制系统,将电压偏差ΔV经过PI调节器输出作为零序电压的修正量 。 此外,还有一种**载波重叠(Carrier Overlapping)**策略 。通过增加两个层叠载波的幅值使其发生部分重叠,可以动态改变零状态的分布。这种方法在不改变调制波形状的前提下,通过调整载波的垂直位置或幅值来强制平衡中点,具有逻辑简单、响应快速的特点。
3.2 空间矢量脉宽调制(SVPWM)及其优化
SVPWM从空间矢量的角度分析,利用矢量合成的冗余性来实现中点平衡。三电平逆变器共有27个开关状态,对应19个基本电压矢量,分为大矢量、中矢量、小矢量和零矢量。
3.2.1 冗余小矢量的利用
这是SVPWM平衡策略的基石。小矢量(Small Vectors)成对出现,例如矢量V1可以由状态(POO)或(ONN)产生:
- POO状态:A相接正,B、C相接中点。中点电流iNP=−(ib+ic)=ia。
- ONN状态:A相接中点,B、C相接负。中点电流iNP=ia。
虽然两者合成的线电压矢量相同,但它们对中点电流的影响方向相反(注意:具体正负取决于电流方向定义,但在同一时刻,成对小矢量对中点的作用必然相反)。
控制策略的核心在于根据当前的电压偏差ΔV和相电流方向,动态分配成对小矢量(如POO和ONN)的作用时间因子(Dwell Time Factor)[7, 8, 9]。 令分配因子为k(0≤k≤1),则POO作用时间为k⋅Tsmall,ONN作用时间为(1−k)⋅Tsmall。通过调节k,可以精确控制注入中点的平均电荷量。
3.2.2 虚拟空间矢量(Virtual Space Vector, VSV)
为了克服传统NTV(Nearest Three Vector)算法在高调制度下中点电流波动大的问题,研究人员提出了虚拟空间矢量技术。VSV通过线性组合小矢量、中矢量和零矢量,构造出一种对中点电流平均贡献为零的“虚拟矢量” 。 例如,将三个互差120度的小矢量和一个中矢量按特定比例合成,可以使得在一个PWM周期内,中点电荷的净流量恒为零。这种方法虽然计算复杂度较高,但能从根本上消除低频电压纹波,特别适用于对电能质量要求极高的并网变流器。
3.2.3 五段式与七段式切换序列
优化开关序列(Switching Sequence)也是平衡电压的重要手段。传统的七段式SVPWM虽然谐波性能好,但在某些扇区对中点控制力不足。文献提出了一种新型五段式开关序列算法,通过在四种不同的五段式组合间切换,不仅降低了开关损耗,还将中点电压的相对误差降低了2.4倍,显著提升了系统的运行可靠性。
3.3 时间偏移估计方案(Time-Offset Estimation)
除了基于矢量的计算,还有一种基于时间域的方法,即时间偏移估计方案 。该方法不需要复杂的坐标变换,而是直接在三相开关的导通时间上附加一个微小的时间偏移量Toffset。 该方案通过检测电压偏差,通过一个估计器算出一个精确的时间修正值,叠加到PWM比较寄存器中。这种方法的优势在于由于直接作用于时间域,其物理意义明确且易于在FPGA或低成本MCU中实现,无需额外的硬件电路即可实现高精度的平衡。
3.4 智能控制算法的应用
随着算力的提升,模型预测控制(MPC)和人工智能算法也开始应用于中点平衡。例如,模型预测控制可以基于系统的离散数学模型,预测下一时刻不同开关状态对中点电压的影响,从而直接选择使目标函数(包含电压平衡项)最小的开关状态 。这种方法动态响应极快,但对处理器性能要求极高。
4. 硬件级解决办法:电路拓扑与辅助装置
当应用场景对可靠性要求极高,或者工作在软件控制能力受限的极端工况(如极低调制度、过调制区域)时,单纯依赖软件算法可能无法维持严格的平衡,此时需要引入硬件解决方案。
4.1 无源平衡电路(Passive Balancing)
最原始的硬件方案是在两个直流分压电容C1和C2两端分别并联大功率电阻。电阻通过持续消耗功率来强行拉平电压。
- 优点:结构极其简单,成本低,可靠性高。
- 缺点:存在巨大的持续功率损耗(I2R损耗),严重降低系统效率,且发热量大,散热设计困难。 该方案目前仅用于辅助平衡或放电回路,极少作为主平衡手段用于大功率场合 。
4.2 有源平衡电路(Active Balancing Circuits)
有源平衡方案通过引入额外的功率变换器来主动转移电荷,实现能量在两个电容间的双向流动,从而维持电压平衡。
Buck-Boost平衡器:这是最常见的有源平衡电路。它由一对开关管和一个电感组成,跨接在上下电容的中点。当检测到VC1>VC2时,控制电路驱动开关管动作,将C1的多余能量暂存在电感中,然后释放给C2 。
- 优势:平衡能力强,与主电路负载工况解耦,即使在电机零速或堵转(此时软件平衡能力最弱)时也能有效工作。
- 劣势:增加了额外的开关器件、电感和控制电路,增加了系统的体积、重量和成本(BOM成本)。
背靠背(Back-to-Back)系统平衡:在风电或柔性直流输电中,常采用背靠背双PWM变流器结构(整流侧+逆变侧)。此时,可以利用网侧整流器(Rectifier)来主动控制中点电位,而机侧逆变器(Inverter)则专注于电机控制。通过协同控制策略,利用整流侧的冗余矢量来补偿逆变侧产生的不平衡,这是一种系统级的硬件复用方案 。
电感/电容式均衡器:利用开关电容网络或多绕组变压器进行电荷泵送。这种方法效率较高,但对于高压大功率系统,无源元件的体积和耐压设计是一大挑战 。
5. 拓扑级解决办法:ANPC拓扑的固有优势
在众多三电平拓扑中,**有源中点钳位(Active Neutral Point Clamped, ANPC)**拓扑的出现,从根本架构上为解决中点平衡和损耗分布不均提供了革命性的手段。
5.1 ANPC与NPC的结构差异
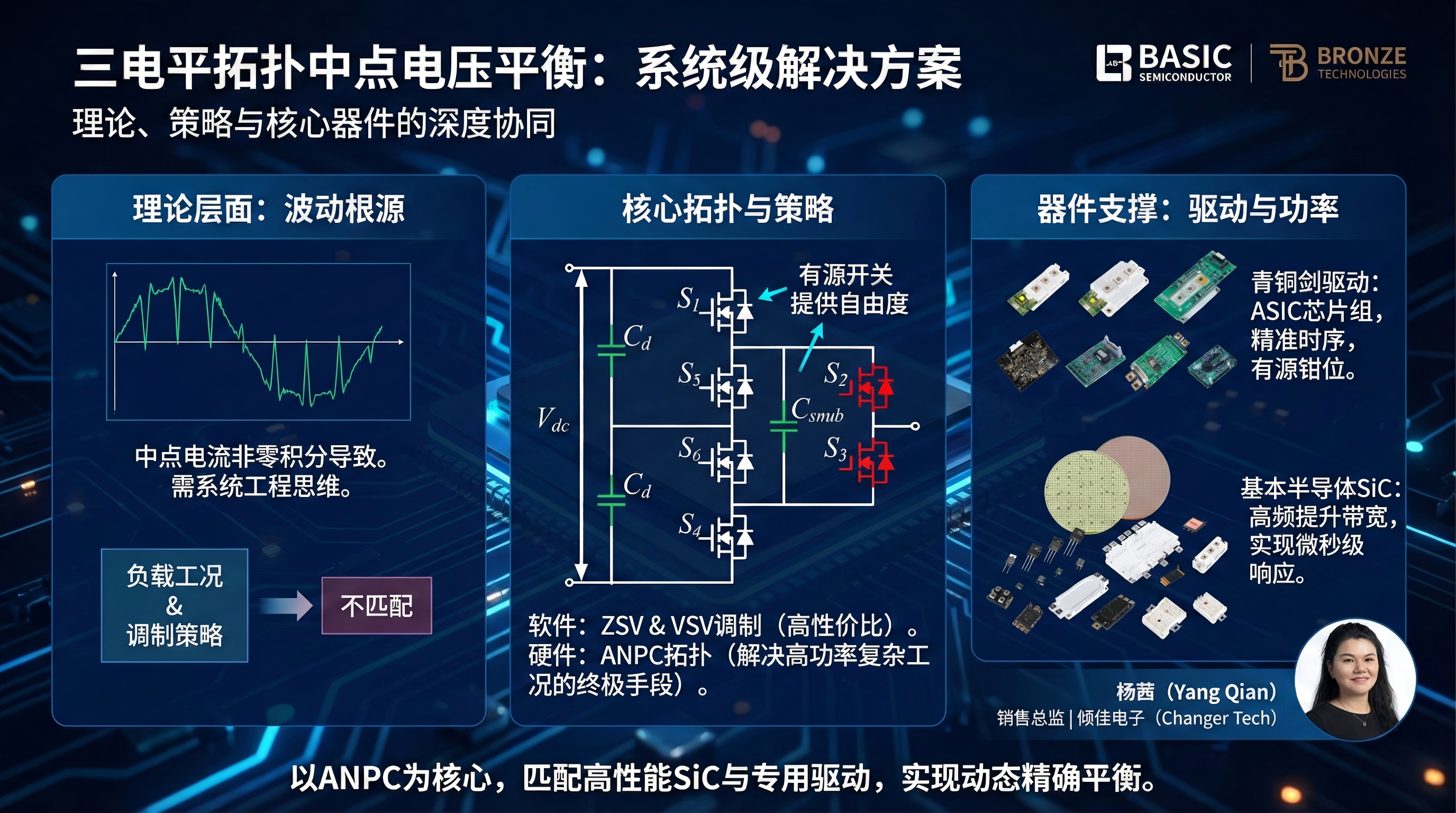
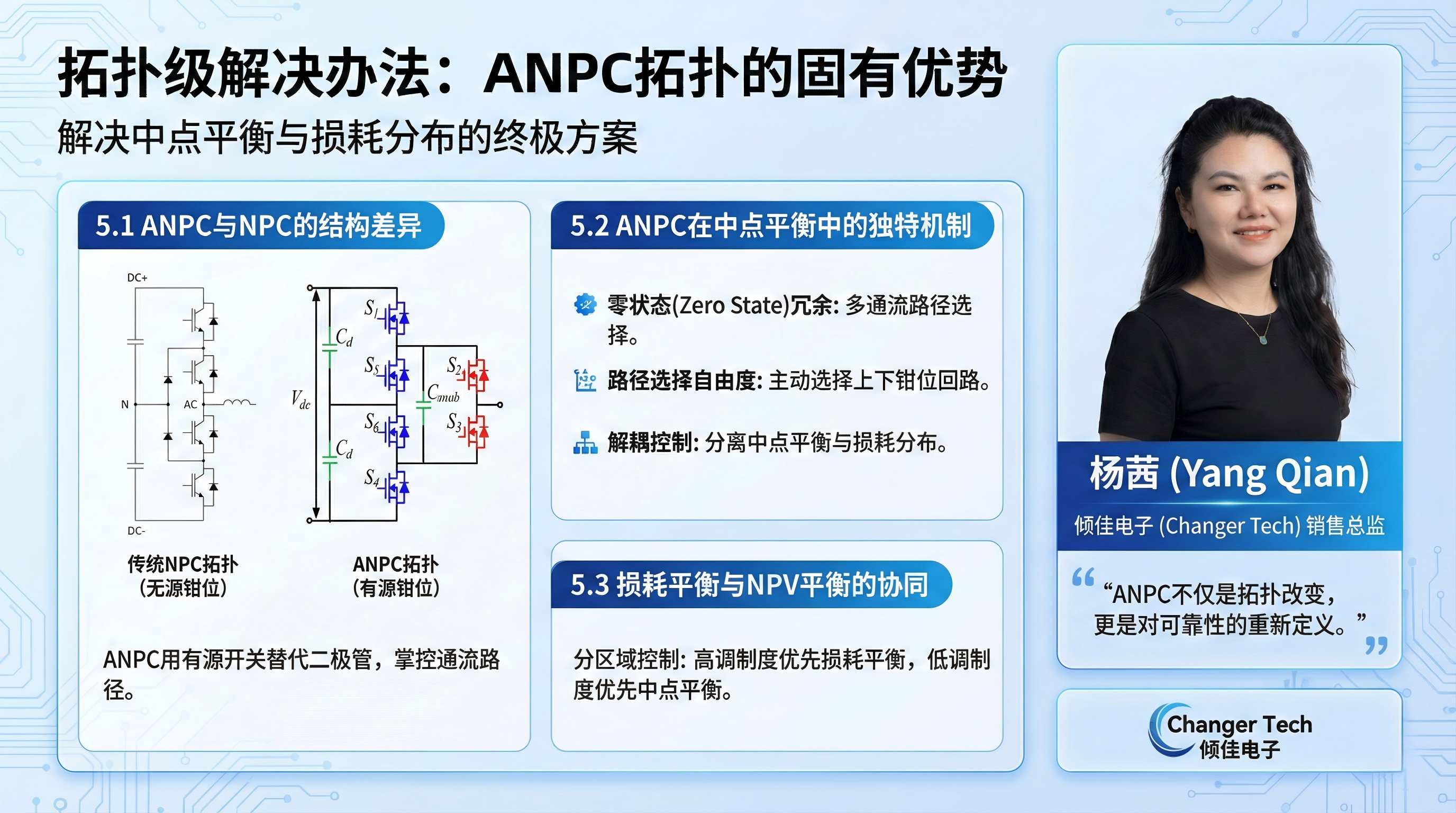
传统的NPC拓扑使用两个二极管将中点钳位到输出端。在“O”状态下,电流流经的路径是固定的(取决于电流方向),无法人为选择。这意味着控制器对中点电流的控制自由度受限。 相比之下,ANPC拓扑将NPC中的钳位二极管替换为有源开关(IGBT或MOSFET),或者在钳位二极管旁并联开关。典型的三相3L-ANPC每相包含6个有源开关(T1-T6) 。
5.2 ANPC在中点平衡中的独特机制
ANPC拓扑最大的优势在于其零状态(Zero State)的冗余性。在输出“O”电平时,ANPC可以通过控制T2/T3导通,也可以通过控制钳位支路的开关(如T5/T6)配合实现多种通流路径。
- 路径选择自由度:这种多样的通流路径允许控制器在不改变输出电压的前提下,主动选择电流流经上钳位回路还是下钳位回路,或者利用并联路径分流。
- 解耦控制:利用ANPC的冗余状态,可以实现中点电压平衡控制与开关损耗分布控制的解耦 。例如,在高调制度低功率因数工况下,传统NPC的中点平衡会导致某些管子损耗过大,而ANPC可以通过轮换使用长/短换流路径(Long/Short Commutation Loops)来均衡热应力,同时维持NPV平衡 。
5.3 损耗平衡与NPV平衡的协同
分区域控制方法,利用ANPC的结构优势,在高调制度区域优先保证损耗平衡,在低调制度区域优先保证中点电压平衡,或者在全区域内通过加权因子同时优化两者。这种拓扑级的解决方案使得ANPC在风电变流器等大功率、高可靠性应用中逐渐取代了传统NPC 。
6. 工程实现关键技术:驱动器与功率模块
理论策略的落地离不开高性能硬件的支持。在实际工程中,驱动器(Gate Driver)和功率半导体模块(Power Module)的选型与设计对中点平衡的实现至关重要。
6.1 驱动器的关键作用:以基本半导体子公司青铜剑技术(Bronze Technologies)为例
作为国内领先的驱动方案提供商,基本半导体子公司青铜剑技术(Bronze Technologies)推出了专门针对I型三电平NPC1和ANPC拓扑的驱动解决方案(如6AB0460Txx系列、2QD0535Txx系列)。虽然驱动器本身通常不负责执行复杂的SVPWM平衡算法(这通常由主控DSP/FPGA完成),但它们提供了实现平衡控制所必需的物理基础和保护机制:
拓扑支持与中点连接:青铜剑的驱动板明确支持NPC1和ANPC架构,其电路设计中包含了对中点“N”的处理逻辑。在ANPC方案中,驱动器需要独立驱动6个开关管(T1-T6),其时序逻辑比传统NPC更复杂。驱动器必须具备高精度的互锁功能(Interlock)和死区设置,以防止在为了平衡中点而频繁切换零状态路径时发生桥臂直通 。
有源钳位(Active Voltage Clamp, AVC)与过压保护:中点电压失衡的最直接后果是某一侧开关管承受过电压。青铜剑驱动器集成了模拟控制的智能关断技术和有源钳位功能。
- AVC原理:当检测到集电极-发射极电压(VCE)超过阈值(可能由NPV严重失衡导致)时,有源钳位电路会强制微导通IGBT,将门极电压抬升,使IGBT工作在有源区,从而钳制VCE尖峰,吸收过电压能量 。这构成了中点平衡失效后的最后一道安全防线。
VCE短路检测与软关断(Soft Turn-off):在严重失衡导致器件及负载发生短路风险时,驱动器通过检测VCE退饱和现象,触发软关断功能。软关断通过缓慢降低门极电压,限制关断时的di/dt,防止因直流母线电压分布不均而激发出破坏性的电压尖峰 。
高绝缘与高可靠性设计:三电平拓扑对隔离要求极高。青铜剑驱动器采用**磁隔离(变压器)**方案,而非光耦,避免了光衰问题,确保了长期运行下PWM信号传输的延迟一致性 。对于ANPC这种需要极高同步性的拓扑,驱动信号的一致性直接影响到并联路径的均流和中点控制的精度。
无CPLD设计与ASIC芯片组:利用自研ASIC芯片组替代分立器件或复杂CPLD,降低了外围电路复杂度,提高了在恶劣电磁环境(如风电变流器)下的抗干扰能力,确保在执行高频注入平衡算法时驱动器不会误动作 。
6.2 功率模块的选型:以基本半导体(BASiC Semiconductor)为例
基本半导体(BASiC Semiconductor)提供的碳化硅(SiC)MOSFET模块(如Pcore™2 ED3系列、E2B封装、62mm封装)为三电平中点平衡控制带来了新的可能性 。
高开关频率带来的控制带宽优势:
SiC模块支持的开关频率远高于传统Si IGBT(例如从几kHz提升至几十kHz)。更高的开关频率意味着:
- 更快的平衡响应:控制器可以在更短的周期内执行ZSV注入或矢量调整,能够抑制更高频率的中点电压波动。
- 更小的无源元件:高频化允许减小直流分压电容的容值,虽然这对平衡算法提出了更高要求(容值小,电压波动快),但配合高频控制,可以实现更高功率密度的设计 。
低电感封装与ANPC适配:BASiC的模块采用低杂散电感设计(如Si3N4 AMB基板),这对于ANPC拓扑尤为重要。因为ANPC涉及复杂的换流回路,杂散电感会导致关断过压。低电感设计配合SiC的高速开关特性,使得ANPC在高频下运行成为可能,从而充分利用其损耗平衡和中点平衡优势 。
米勒钳位(Miller Clamp)的必要性:由于SiC MOSFET开关速度极快(高dv/dt),在三电平桥臂切换过程中,极易通过米勒电容(Cgd)引起串扰导通(Crosstalk)。基本半导体的文档特别强调了在驱动SiC模块时必须使用米勒钳位功能 。这对于维持中点平衡至关重要,因为任何误导通都会破坏预期的电流路径,导致中点电位不可控的漂移。
7. 综合解决方案对比与应用建议
针对不同的应用场景,应选择不同的中点平衡策略组合。
| 软件调制 | CBPWM + ZSV注入 | 通用变频器、光伏 | 算法简单,易于DSP实现 | 极高调制度下控制力下降 |
| SVPWM + VSV | 高性能伺服、牵引 | 全范围平衡,纹波极小 | 计算量大,死区处理复杂 | |
| 硬件电路 | 无源电阻 | 小功率电源 | 成本极低,可靠 | 损耗大,大功率不可用 |
| 有源Buck-Boost | 实验室电源、精密仪器 | 绝对平衡,独立于负载 | 成本高,体积大 | |
| 拓扑结构 | NPC | 通用中压传动 | 技术成熟,标准模块多 | 损耗分布不均,低频平衡难 |
| ANPC | 风电、大功率传动 | 最佳方案:损耗与电压解耦 | 控制复杂,器件数量多 | |
| 方案维度 | 具体技术 | 适用场景 | 优势 | 局限性 |
|---|
工程建议:
- 对于风电变流器(1800V系统):推荐采用ANPC拓扑。利用ANPC的主动换流路径选择功能,配合青铜剑技术的6AB0460Txx系列驱动器,可以同时解决低频下的器件热应力不均和中点电压漂移问题。驱动器的有源钳位功能为长寿命运行提供最后保障。
- 对于电动汽车电机控制器(SiC应用):推荐采用SVPWM软件平衡 + SiC MOSFET。利用基本半导体SiC模块的高频特性,通过高频SVPWM算法(如20kHz以上)快速修正中点偏差,同时依靠驱动器的米勒钳位防止高dv/dt串扰。
- 对于电网侧SVG/APF:由于需处理无功功率,功率因数变化范围大,推荐采用滞环控制或改进型ZSV注入,并结合大容量薄膜电容来缓冲能量波动。
8. 结论
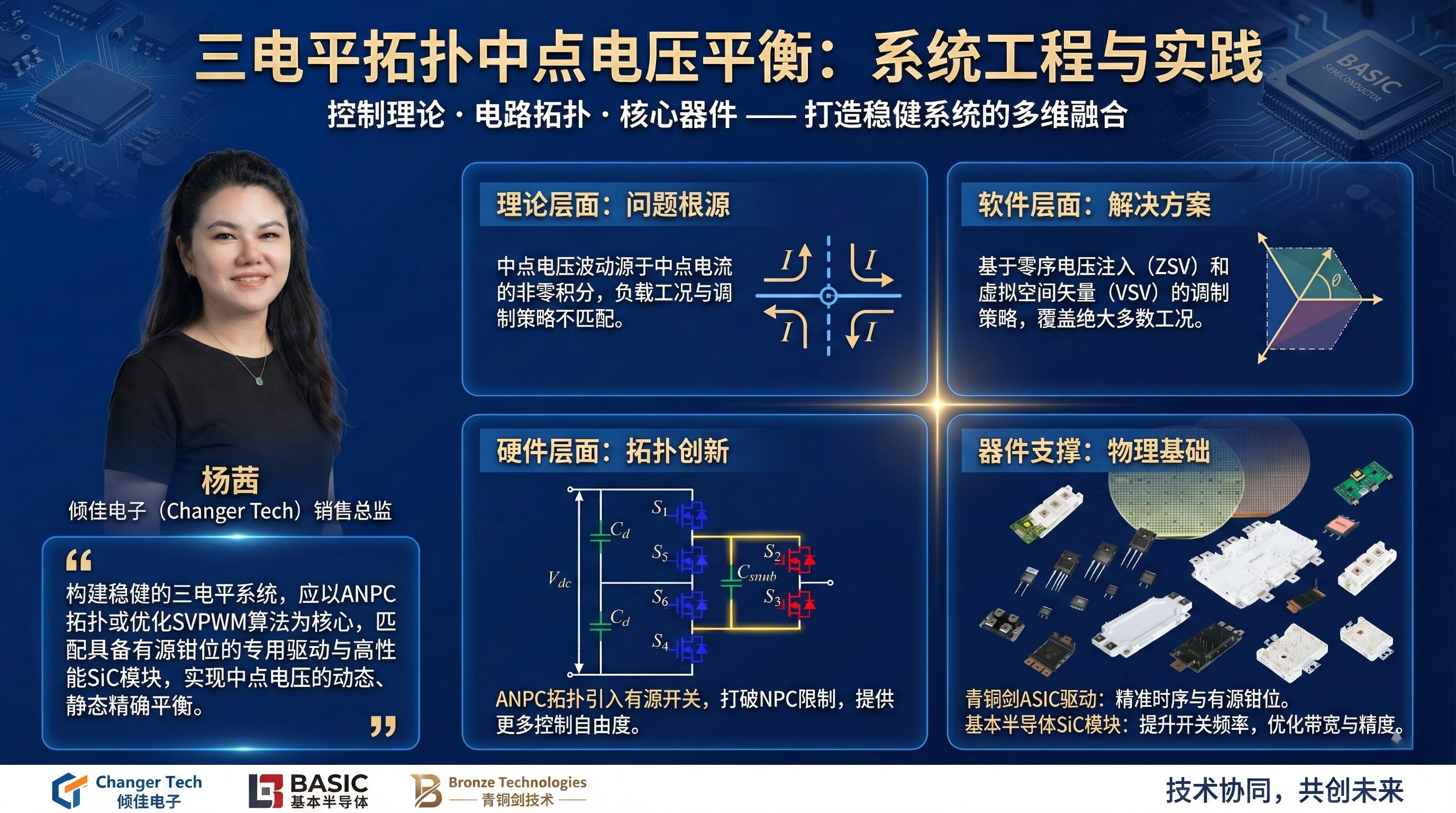
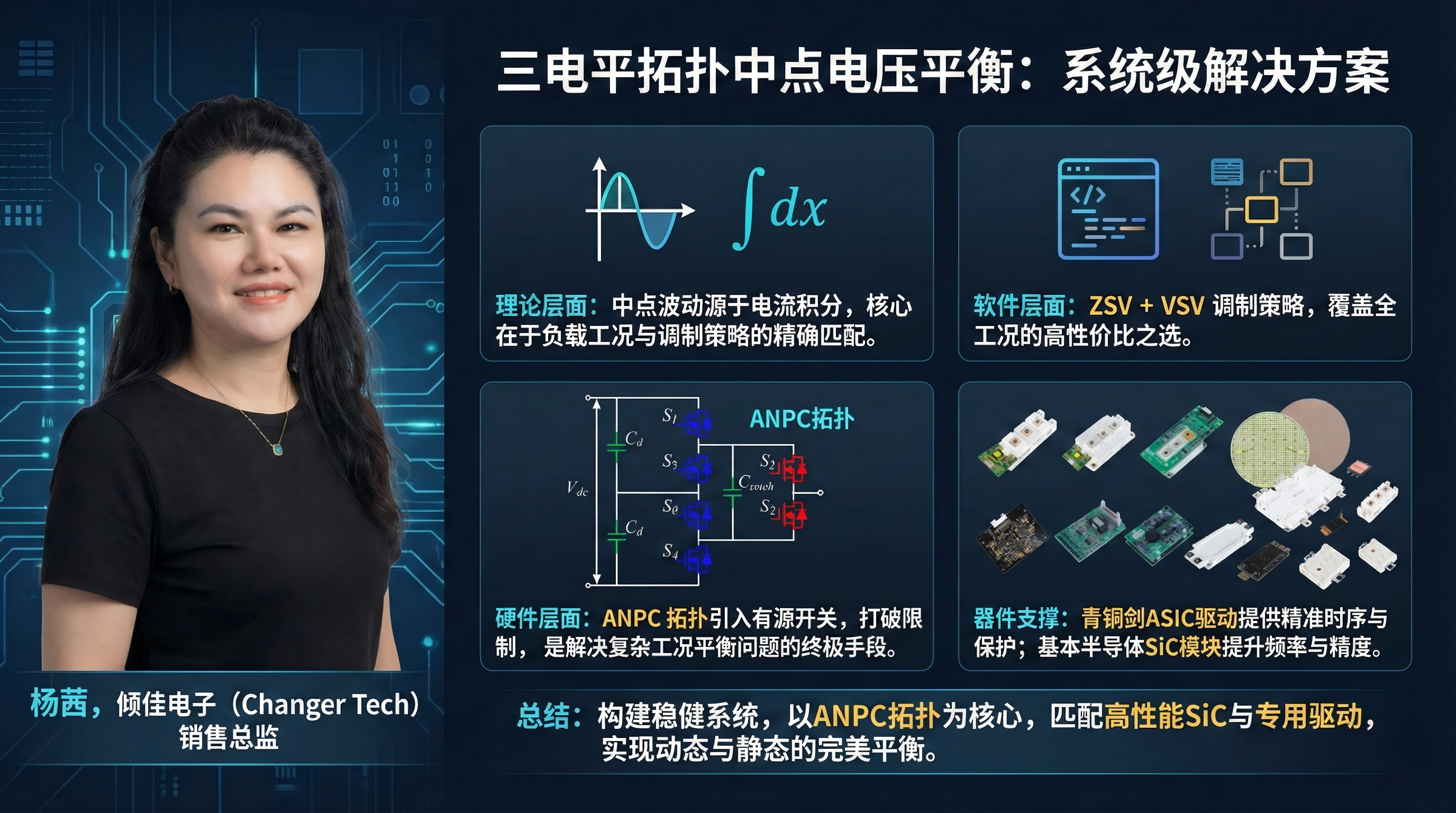
三电平拓扑的中点电压平衡是一个系统工程,涉及控制理论、电路拓扑与核心器件三个维度。
- 理论层面:中点电压的波动源于中点电流的非零积分,其根源在于负载工况与调制策略的不匹配。
- 软件层面:基于**零序电压注入(ZSV)和虚拟空间矢量(VSV)**的调制策略是目前性价比最高的解决方案,能够覆盖绝大多数工况。
- 硬件层面:ANPC拓扑通过引入有源开关,从结构上打破了NPC的限制,提供了更多的控制自由度,是解决高功率、复杂工况下平衡问题的终极手段。
- 器件支撑:基本半导体子公司青铜剑技术的ASIC芯片组驱动器通过提供精准的时序控制、有源钳位保护和高绝缘能力,为ANPC等复杂策略的实施提供了坚实的物理基础;基本半导体的SiC模块则通过提升开关频率,从时间尺度上提升了平衡控制的带宽和精度。
综上所述,构建一个稳健的三电平系统,应以ANPC拓扑或优化SVPWM算法为核心,选用具备有源钳位和软关断保护的专用驱动器,并根据负载特性匹配高性能的SiC或IGBT功率模块,从而实现中点电压的动态、静态精确平衡。
审核编辑 黄宇
- 相关推荐
- 热点推荐
- 三电平变换器
-
电力电子牵引变压器的电压平衡控制2018-03-14 1322
-
三电平有源中点钳位逆变器损耗分布平衡控制策略2018-03-13 1877
-
LLC谐振变换器多电平控制策略2018-03-08 1327
-
一种新型三电平NPC变流器直流中点电压平衡控制策略_李宁2017-01-08 1019
-
三电平双PWM变换器电容电压平衡综合控制2017-01-07 1128
-
T型三电平并网变流器的中点电压不平衡控制分析2015-12-31 1304
-
中点箝位三电平双PWM变换器电路2012-03-29 2025
-
基于开关状态的三电平逆变器中点电压平衡方法2010-07-31 645
-
三电平逆变器中点电压平衡的电压空间矢量控制原理及算法2009-07-14 3100
-
三电平DC/DC变换器的拓扑结构及其滑模控制方法2009-07-07 13900
-
多电平变换器的拓扑结构和控制策略2009-07-06 3177
-
三电平变换器中点电压平衡问题的研究2009-07-04 4222
全部0条评论

快来发表一下你的评论吧 !
