

三指机器爪制作教程
电子说
描述
制作难度:★★★☆☆
GEEK指数:★★★★☆
以下是这次的制作……爪子。
“爪子”就是我发明的超酷三指机器人爪子。它通过一台伺服电机进行控制,并且可以通过安装另一台伺服电机,将其作为“手腕”来使用。
1 工具和材料
● 激光切割机
● 一台电钻
● 一台伺服电机
● 胶水
○ 3×3 毫米的螺栓
○ 3×3 毫米的尼龙防松螺母
○ 4×4 毫米的螺栓
○ 4×4 毫米的螺母
○ 一些多芯线
○ 一些 3mm 的榫钉
○ 3 个小的拉力弹簧
2 激光切割零件
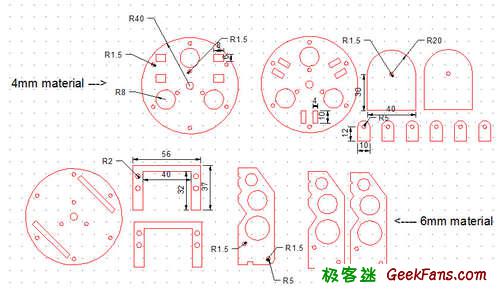
下面附上了用于激光切割的DXF格式图纸。这张图纸非常清晰明了。如果你无法使用激光切割机,那么下面还附上了设计方案。
3 组装底座
你手头应该有3块圆形的底板。其中一块的内部有两个长长的矩形槽,先把它放到一边。将另外两块底板用胶水粘起来,确保所有的孔都相互对准。我用螺栓来确保这些孔在一条线上。
4 添加钳夹支架
将6块最小的零件用胶水粘到底板上,确保它们都确确实实地站直了。
5 安装伺服电机支架
将伺服电机用4毫米的螺栓和螺母固定在两个伺服电机支架的其中一个上。接着,将底板翻过来,把两个支架用胶水粘上去。
6 添加榫钉
切割出6根50毫米长的直径3毫米的榫钉。将它们插入两块底板上的6个靠外的孔中,并且穿过去,让它们的顶端与伺服电机所在的反面相齐平。我发现用削铅笔的小刀来刮削榫钉的顶端可以很方便地保证它们与底板齐平。
7 添加第三块底板
每隔一根榫钉,将3个弹簧钩在榫钉上,确保它们正对着3对钳夹支架的当中。然后,将第三块底板压在榫钉上。
8 用胶水固定“腕部”支架
用胶水把两个“腕部”零件粘在第三块底板上。
(抱歉我没有合适的照片,我貌似忘记拍了。)
9 添加钳夹
水平地在最靠近中央的孔中钻一个小孔。并且将另一个孔的每一个面都锉一下,好让弹簧能自由伸缩。然后,把一根线伸到孔中,接着从另一侧拉出来。在线的末端打一个结,然后将它重新推回孔中。接着,将各个钳夹用螺栓和尼龙防松螺母固定在钳夹支架上。
10 大功告成
将弹簧的一头弯到足以贴合孔的边缘,然后再把它弯回到原来的位置。让3根钳夹线从中央的孔中穿过,然后穿过伺服电机顶部的孔,将它们系紧。
11 享受乐趣!
这个爪子可以安装在另一台伺服电机上,形成一个手腕。伺服电机应该能拖动那些线,从而将爪子收紧。当伺服电机朝反方向反旋转时,这些爪子应该会受到弹簧的弹力而张开。
12 健康与安全事项
警告,爪子有可能会活过来,把你的魂给吃了。还有,你可能会发现有什么小孩子或者宠物突然被抓走了。
- 相关推荐
- 热点推荐
- 机器人
-
iFunbot搬运机器人机械爪安装手册V1.12017-11-01 3308
-
大族机器人-夹爪2016-12-25 801
-
桁架机器人的卡爪怎么维护?2019-01-22 703
-
什么是工业机器人夹爪它有什么用2019-09-02 6336
-
dfrobot机器人机械爪介绍2019-11-26 2818
-
工业机器人搭配伺服电动夹爪的五大优势2020-07-27 3341
-
金器工业:打造集成型机器人末端夹爪2021-01-07 3933
-
慧灵六轴机械臂和电动夹爪,适配全自动粉面&烘焙机器人2023-07-01 1737
-
机器人制作软爪时要注意什么?2023-07-13 381
全部0条评论

快来发表一下你的评论吧 !
