

智能汽车算法和车体机械特性对智能汽车系统的影响
电子说
描述
摘要:
在5G技术的背景下,对当前智能汽车自动驾驶的方向控制领域进行研究。现有智能车识别算法大多都依赖于中线误差以控制智能汽车行驶,一旦应对无中线或者中线难以获取的道路就束手无策。针对该现状,对智能汽车随动系统进行了鲁棒性分析,在此基础上提出了具体的模糊方向控制策略,并通过实验验证了该策略的优势。对智能汽车系统的分析、解决策略和实验有利于对智能汽车系统进行改进。
❖
0 引言
5G技术在近些年已经获得了较好的发展和应用。在智能驾驶领域,5G的大带宽和低时延为实现无人驾驶汽车端到端控制需要处理的超大数据量提供了可能。近年来,无人驾驶汽车正以迅猛的速度发展,其涵盖了工程控制、信息与通信、模式识别、传感技术、电气工程、计算机等多个学科,是当下智能交通的重要解决方案之一[1]。
在实际的实际道路环境中,智能汽车的控制端需要与传感设备采集到的诸多信息进行大量的数据交换,并进行实时处理以得到控制输出。
目前许多智能汽车道路识别算法都依赖于找到道路的实际中线,并根据其与理想中线的误差来控制智能汽车方向。位置随动系统是一个不具有精确数学模型的系统,采用常规控制方法较复杂且效果不佳[2]。此外,随着智能汽车的发展,智能汽车的道路类型越来越丰富,其中不少道路都是无中线或者中线难以获取的,如:环岛、十字、斜入十字等。依靠中线的算法将无法适应现有的道路。
1 系统软件设计方案
1.1 智能汽车系统鲁棒性分析
智能汽车系统的处理流程如图1所示,摄像头采集模块负责对图像进行获取,经过图像解压缩、去燥等预处理之后传送给图像处理模块进行道路类型识别,最后将结果输出给执行控制模块进行车体控制。
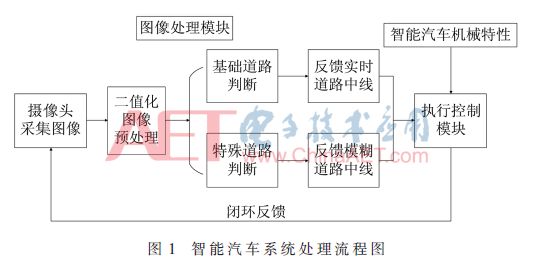
在传统图像处理中,常要求图像处理模块反馈精确的中线。在高速运行的智能汽车系统中,受限于采集设备和处理器的处理速度,通常无法对所有情况都进行处理和分析,这要求系统对处理信息进行一定的取舍[3]。在随动系统中,图像处理模块并不需要每次都提供准确的道路中线,只需要向执行控制模块提供简单灵活的、高速的位置和姿态反馈,主要有以下两方面的原因。
(1)智能汽车的机械特性无法完全正确反映图像处理的结果。智能汽车是一个实时控制的随动系统,系统通过改变舵机或者电机来控制智能汽车进行高速移动。由于车辆动力学中的某些参数(如前后轮的侧偏刚度、车体转动惯量、舵机和电机机械特性硬度)不断变化,调速范围有限,调节过程不平滑等特点,这必然也限制着智能汽车控制效果,误差也始终伴随着智能汽车整个行驶过程[4]。
(2)智能汽车闭环反馈算法能在一定时间内消除反馈的瞬时抖动。闭环系统能根据控制对象输出反馈来进行实时的校正,在测量出实际与计划发生偏差时,可根据误差量进行实时纠正。
在自动驾驶过程中,智能汽车对从接收传感器监测的路况信息到控制系统做出反应的时间越短,则自动驾驶的安全系数就越高。因此,对智能汽车控制器控制策略的优化是有必要的,5G技术将使得车联网系统的反应时间从秒级极大地提高至毫秒级。
1.2 模糊方向控制设计
本系统中包含的道路类型分为特殊道路类型和基础道路类型。十字与斜入十字道路图像如图2所示。由于基础道路类型中线清晰,较容易用传统中线算法获得,因此模糊方向控制主要针对特殊道路类型,其控制步骤如下:
(1)对图像进行道路类型识别,判断道路左右边线巡线过程中是否出现跳变。
其中,xedge指图像新的一行横坐标xnew与其上一行横坐标xold之间差值的绝对值,若该差值大于一定阈值th,则认为线过程出现跳变,发生跳变的行数为jy。经过此步骤可初步认定道路为特殊道路类型。
(2)继而针对不同特殊道路类型辅助判断,即可识别出特殊道路的具体类型。辅助判断的方式有很多,对十字道路而言可判断左右边线是否同时跳变,这可以通过中线寻迹算法获得。以下就跳变行上是否存在一段长条状白带以判断道路是否为十字道路类型。
其中,Colsmax为最大的列数,Cth为左右边界误差冗余度,jy为发生跳变的行数,二位数组image为图像数据,黑色点保存为数字“0”,白色点保存为数字“1”。若Index满足:
则认为图2中道路为十字道路类型的概率较大,可再进行下一步判断以准确识别道路类型。
(3)判断道路类型为十字后,针对十字道路类型,需要找的模糊中线可定义为十字类型上方道路重新找到边线后的中线Centrecross,如图2中星号标志所示。此外,可针对智能汽车行驶效果,更改模糊中线的大小。
其中,Centre为发送到执行控制模块的中线值,midth为中线调整范围。在对特殊道路进行模糊控制后,智能汽车在经过如十字、斜入十字、环岛等特殊道路类型时,出现的抖动、车体偏移等减少明显,下面设计了具体实验以测试处理效果。
2 稳定性测试结果分析
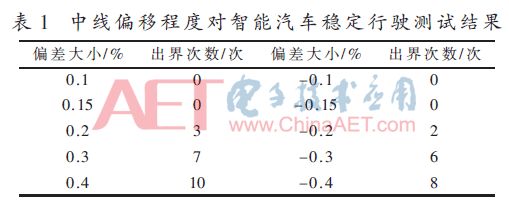
为了验证多场稳定图像处理结果中出现误差反馈对车辆行驶稳定性的影响程度,本文设计了两组重复平行实验。本实验的道路环境为:道路长度110 m,测试速度约为2.3 m/s,道路类型包含直道、弯道、十字道路、环岛等。实验中以中线偏移程度和冲出道路次数为主要指标。精确按照中线巡线算法得到的中线测试数据如表1所示,引入模糊中线控制后测试数据如表2所示。

具体测量方法是在图像处理结果加入中线误差反馈。这里反馈误差设置不同等级的偏差程度α,计量方法为:
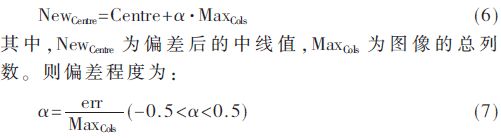
偏差程度α表示误差大小占图像总行数的比例,err为偏差量。改变偏差程度α的大小,在20次测试中,记录智能汽车跑出道路之外的次数。测试结果见表1和表2。
从表1中可以看出,在智能汽车行驶过程中加入少量的误差反馈并不会影响到智能汽车的稳定行驶。这说明了智能汽车算法和机械特性的影响下,智能汽车对误差反馈有一定容忍度。当偏差绝对值大于20%时,智能汽车行驶已经出现较严重的抖动,这是因为智能汽车系统在当前机械结构和算法的基础上已经达到临界稳定状态。改善智能汽车系统的结构,其特性或参数的允许扰动范围也越大,其鲁棒性也越好。
从表2可以看出,模糊中线控制有利于改善智能汽车系统误差反馈的控制。在相同情况下,尽管智能汽车的中线反馈出现误差,但是智能汽车系统还是能沿道路稳定行驶。这是因为智能汽车识别算法提取的模糊中线不止反映了智能汽车行进的方向,还增大了智能汽车系统的“稳定裕量”,在中线不精确或存在其他变化因素的条件下,使系统仍能保持预期的性能。此外,引入模糊中线后,智能汽车压路肩的情况大大减少了,对智能汽车稳定行驶有极大的帮助。
上述重复平行实验表明,通过对特殊道路类型进行识别提取出模糊中线对提高智能汽车系统鲁棒性和适应性具有明显的优势。
3 结束语
本文分析了智能汽车算法和车体机械特性对智能汽车系统的影响,并通过实验验证了中线反馈偏移对智能汽车运行的影响。在此基础上,针对现有依赖道路中线的算法的改进方法,使智能汽车稳定、高速地在未知道路上行驶,给无人驾驶汽车系统实验和自动控制、视觉计算算法的改进提出了可行的建议。此外,将该技术应用到无人驾驶领域,一个大带宽、低延迟的网状网络是必不可少的。5G的10 Gb/s网络传输速率、超高的连接数和高精度的定位能力使得它在自动驾驶领域表现出极大的潜力。
-
汽车智能换挡系统的研究2009-12-02 0
-
智能模型车系统开发与研究2011-07-25 0
-
智能汽车2012-04-12 0
-
大学生智能汽车设计整本书课件(超级推荐)2012-08-04 0
-
【OK210申请】智能汽车安防系统2015-07-08 0
-
智能汽车发展概况及导航系统原理2016-04-11 0
-
智能汽车的发展概述2016-05-17 0
-
感测技术于智能汽车实现中的应用2016-05-23 0
-
万物互联时代,智能汽车需要陶瓷基板2021-01-11 0
-
请问怎么设计一种汽车智能数字仪表测试系统?2021-04-14 0
-
智能无线通信系统在汽车安全中的应用2021-05-13 0
-
如何去设计一种汽车智能语音报警系统?2021-05-17 0
-
福特汽车与谷歌合作,重塑智能网联汽车体验2021-02-02 1029
全部0条评论

快来发表一下你的评论吧 !
