

学会PID控制是自控技术入门的必要
电子说
描述
1、PID定义
PID控制技术,PID控制,在实际中分为PI和PD控制,PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。其输入e (t)与输出u (t)的关系为:
u(t)=kp(e(t)+1/TI∫e(t)dt+TD*de(t)/dt),式中积分的上下限分别是0和t,
因此传递函数为:G(s)=U(s)/E(s)=kp(1+1/(TI*s)+TD*s),其中kp为比例系数; TI为积分时间常数; TD为微分时间常数。
当今的闭环自动控制技术都是基于反馈的概念以减少不确定性。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的是被控变量的实际值,与期望值相比较,用这个偏差来纠正系统的响应,执行调节控制。在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
这个理论和应用的关键是,做出正确的测量和比较后,如何才能更好地纠正系统。
PID(比例(proportion)、积分(integration)、微分(differentiation))控制器作为最早实用化的控制器已有近百年历史,现在仍然是应用最广泛的工业控制器。PID控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。
2、PID控制说明
比例(P)控制 :比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差。
积 分(I)控制 :在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简 称有差系统。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分 项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
微分(D)控制 :在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后组件,具有抑制误差的作用,其变化总是落后 于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是 不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差 的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。
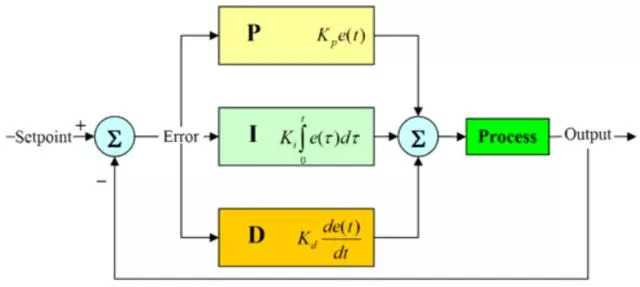
PID 控制器框图
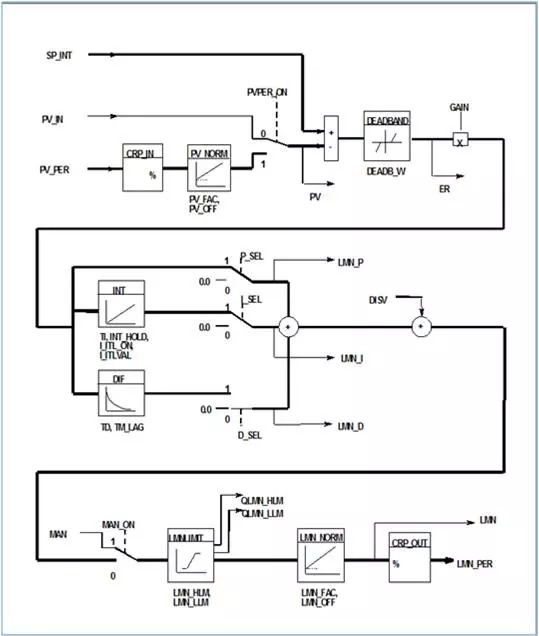
PID CONT_C (连续调节控制器)块图
应用程序
你可以使用控制器作为单独的PID定点控制器或在多循环控制中作为级联控制器、混合控制器和比例控制器使用。控制器的功能基于带有一个模拟信号的采样控制器的PID控制算法,如果必要的话,可以通过脉冲发送器(PULSEGEN)进行扩展,以产生脉冲宽度调制的输出信号,来控制比例执行机构的两个或三个步进控制器。
说明
除了设定点操作和过程数值操作的功能以外,SFB41/FB41(CONT_C)可以使用连续的变量输出和手动影响控制数值选项。来实现一个完整的PID控制器。下面是关于SFB41/FB41(CONT_C)详细的子功能说明:
设定点操作
设定点以浮点格式在SP_INT端输入。
实际数值操作
过程变量可以在外围设备(I/O)或者浮点数值格式输入。CRP_IN功能可以将PV_PER外围设备数值转换为一个浮点格式的数值,在-100和+100%之间,转换公式如下:CRP_IN的输出=PV_PER×100/27648。PV_NORM功能可以根据下述规则标准化CRP_IN的输出:输出PV_NORM=(CRP_IN的输出)×PV_FAC+PV_OFF,PV_FAC的缺省值为1,PV_OFF的缺省值为0。变量PV_FAC和PV_OFF为下述公式转化的结果:
PV_OFF=(PV_NORM的输出)-(CRP_IN的输出)×PV_FAC,
PV_FAC=((PV_NORM的输出)-PV_OFF) /(CRP_IN的输出)不必转换为百分比数值。如果设定点为物理确定,实际数值还可以转换为物理数值。
复偏差计算
设定点和实际数值之间的区别便形成负值偏差。为了抑制由于被控量的量化引起的小的、恒定的振荡(例如使用PULSEGEN进行脉冲宽度调制),在死区将施加一个死区,如果DEADB_N=0,则死区将关闭。
PID算法
PID算法作为一种位置算法进行控制。比例运算(INT)和微商运算(DIF)都可进行连接,也可以单独激活或取消。这就允许组态成P、PI、PD和PID控制器。也可以是纯I和D调节器。
手动模式
可以在手动模式和自动模式之间切换。在手动模式下,被控量被修改成手动选定的数值。积分器(INT)内部设置为LMN-LMN_P-DISV,微商器(DIF)内部设置为0,并进行内部匹配。这就是说切换到自动模式时不会引起被控量的突变。
受控数值的处理
使用LMNLIMIT功能,受控数值可以被限制为一个所选择的数值。当输入变量超出极限值时,信号位将指示。LMN_NORM功能可以根据下述公式标准化LMN_LIMIT的输出:LMN=(LMNLIMIT的输出)×LMN_FAC+LMN_OFF
LMN_FAC的缺省值为1,LMN_OFF的缺省值为0。
受控数值也适用于外围设备(I/O)格式。CRP_OUT功能可以将浮点值LMN转换为一个外围设备值,转换公式如下:LMN_PER=LMN×2764/100
前馈控制
一个干扰变量被引入DISV端输入。
初始化
SFB 41/FB 41CONT_C有一个初始化程序,可以在输入参数COM_RST=TRUE置位时运行。在初始化过程中,积分器可以内部设置为初始值I_ITVAL。如果在一个循环中断优先级调用它,它将从该数值继续开始运行。所有其他输出都设置为其缺省值。
出错信息
故障输出参数RET_VAL不使用。
PID FB41 输入部分参数说明
PID FB41输出部分参数说明
3、规格化概念及方法
PID参数中重要的几个变量,给定值、反馈值和输出值都是用0.0~1.0之间的实数(实际上就是百分比)表示,而这几个变量在实际中都是来自于模拟输入或者输出控制模拟量的,因此,需要将模拟输入转换为0.0~1.0的数据,或将0.0~1.0的数据转换为模拟输出,这个过程称为规格化。
规格化的方法:即变量相对所占整个值域范围内的百分比,对应于27648数字量范围内的量。
对于输入和反馈,执行:变量*100/27648,然后将结果传送到PV_IN和SP_INT。
对于输出变量,执行:LMN*27648/100,然后将结果取整传送给PQW即可。
4、PID 参数设置及调节方法
方法一:
PID参数的设定:是靠经验及工艺的熟悉,参考测量值跟踪与设定值曲线,从而调整P.I.D的大小。PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:
温度T: P=20~60%,T=180~600s,D=3-180s,压力P: P=30~70%,T=24~180s,液位L: P=20~80%,T=60~300s,
流量L: P=40~100%,T=6~60s。
方法二:
1、PID调试一般原则:在输出不振荡时,增大比例增益P/减小积分时间常数Ti/增大微分时间常数Td。
2、一般步骤
1)确定比例增益P
首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0,使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
2)确定积分时间常数Ti
比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
3)确定积分时间常数Td
积分时间常数Td一般不用设定,为0即可。若要设定,与确定 P和Ti的方法相同,取不振荡时的30%。
4)系统空载、带载联调,再对PID参数进行微调,至满足要求。
方法三:
一般不用D,除非一些大功率加热控制等惯大的系统;仅使用PI即可,
一般先使 I 等于0,P从0开始往上加,知道系统出现等幅振荡为止,记下此时振荡的周期,然后设置 I 为振荡周期的0.48倍,应该就可以满足大多数的需求。
-
PID刚入门?新手必看的15个PID基本概念!2023-09-25 4149
-
教你怎样学会PID调参2022-01-06 1298
-
经典的PID控制技术图书《Advanced PID Control》pdf2021-11-08 3763
-
DB-ATC自控原理与计算机控制实验仪自控原理2021-09-10 936
-
基于由入门到精通吃透PID2017-10-15 1059
-
PID调节控制做电机速度控制资料2016-07-20 1237
-
多层模糊PID控制技术2016-04-01 531
-
伺服系统的PID控制技术下载2015-12-09 879
-
求教各位大神,自控四轴飞行器,程序设计和PID控制如何解决2015-07-14 2213
-
初步学会的PID算法,测电机2015-05-20 4068
-
PID控制算法入门到精通2013-05-21 105164
-
基于S7-200 PLC水厂自控系统设计2011-08-29 1277
-
浅论自控技术在涤纶纺丝中的应用2010-11-04 547
-
数字PID控制技术2010-04-28 568
全部0条评论

快来发表一下你的评论吧 !
