

温度传感器的电路结构及原理
电子说
描述
摘要:
针对温度对于时域温度传感器电路性能的影响做了相应改进。首先根据温度系数与晶体管尺寸的定性关系,通过减小传感部分的晶体管长宽比以增大其温度系数。其次在TDC(Time-to-Digital Converter)的振荡环中加入用于温度补偿的电流镜并调整反相器参数,以使TDC振荡环在所选温度范围内温漂接近于0。该方法减少了电路的总功耗和功率密度,从而降低了电路自热以及自热造成的性能损失。
0 引言
传统的温度传感器设计通常先将温度转换为模拟信号,再通过ADC(Analog-to-Digital Converter)得到数字信号[1]。但随着芯片热管理、物联网等新应用的发展,对于温度传感器的功耗、面积和数字电路的兼容性等方面都提出了较高的要求。所以越来越多的设计者开始向着数字化的方向探究温度传感器的可综合性和高集成度。时域温度传感器具有面积小、功耗低、容易使用数字器件实现等优势,近年来受到了广泛的关注[2-4]。
目前有许多时域温度传感器的研究成果,如文献[5]中所提出的基于单条延时链的时域温度传感器以及文献[6]中基于双延时链的时域温度传感器。它们都具有较简单的温度测量原理,但需要比较多的反相器来组成很长的延迟链以满足测量范围和精度的需求。另一类基于环形振荡器的时域温度传感器,如文献[2]、文献[3]中提出了基于单个环形振荡器的全数字温度传感器,这一类传感器在测量80℃以下的温度时精度较高。文献[4]中提出了两个对温度敏感度不同的环形振荡器的传感方法,通过调整两个环形振荡器晶体管尺寸并取它们的频率比值来消除电源电压和工艺参数对电路的影响,从而减小温度测量误差。
在处理器热管理等应用场景中,通常50℃以上高温段的准确性更为重要,一般的温度传感器对此考虑得较少。本文基于参考文献[2]、文献[3]的电路结构,针对原有的传感部分温度系数较小以及TDC温漂问题进行改进,以使电路满足在重点监控的温度范围内精度较高这一特定的应用需求。
1 温度传感器的电路结构及原理
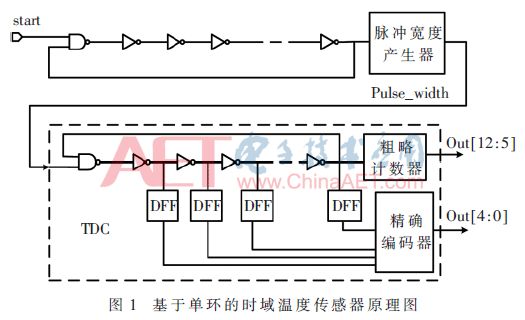
时域温度传感器首先需要将温度信息转换为时间信息,环形振荡器是将温度转换为时域变量的一种方式。根据文献[7]可知,反相器的延时与温度有类线性关系。通过时间-数字转换器(Time-to-Digital Converter,TDC)对频率进行测量,即可将温度最终转化为数字码字。为进一步提升准确性,通常还需要对转换后的数据加以校准。除此之外,对电源电压的校准还可以通过多次测量求方差来实现。基于带温度补偿的转换器的时域温度传感器的主要电路结构如图1所示。
1.1 传感电路的分析与改进
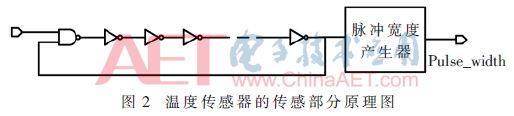
本设计的传感部分主要利用温度与反相器延时的关系将温度转化为与之有关的时间变量脉冲宽度pulse_width。其电路原理图如图2所示。
由文献[4]可知,反相器的延时与温度存在以下定量关系:

其中W、L分别为构成晶体管的宽和长;CL和Cox分别为负载电容和单位面积的氧化层电容;μ为电子(或空穴)的迁移率;VDD和Vth分别为电源电压和阈值电压。从式中可以看出反相器的延迟和多个参数有关,在这些参数中迁移率μ和阈值电压Vth是受到温度影响的。晶体管宽长比的改变同时引起阈值电压和负载电容的改变,因此选取合适的晶体管尺寸对传感部分尤为重要。相比于迁移率,温度通过影响阈值电压而对反相器延迟造成的变化较小[7]且基本呈线性关系[8]。因此在本文所关心的50 ℃~100 ℃这一测量范围内,可以只关注温度对于迁移率的影响。迁移率具有负温度系数,其具体关系如下:

其中q为电子(或空穴)的带电量;m为有效质量;T为温度;Ni为电离杂质浓度;A和B是相对系数。由式(1)可知:反相器延时与迁移率呈反比D∝1/μ;由式(2)可知:迁移率与温度呈类反比例关系μ∝1/T^a(此处a为接近于1的常数[4]),由文献[9]可知,环形振荡器的频率F=1/(2ND),因此振荡环的频率对温度的敏感度与晶体管的长宽比呈反比。振荡环的振荡频率过高会导致功耗较大从而引起较大的自热效应,因此干扰了对实际温度的测量。利用蒙特卡罗仿真方法最终得到PMOS合理的宽长比为L/W=0.3 μ/0.24 μ,由于电子迁移率约为空穴的2.5倍,为使反相器的上升时间和下降时间均衡,使NMOS的宽长比为L/W=0.3 μ/0.12 μ。综合考虑振荡频率以及温度系数,最终选定由31级反相器构成传感部分的环形振荡器。
利用参考文献[2]中的脉冲宽度产生器可以得到带有温度信息的时域变量。根据式(1)、式(2)可知,该脉冲的宽度pulse_width即为与温度相关的时间变量。由式(1)、式(2)中反相器与温度的定量分析可知,该脉冲的脉冲宽度在所测温度范围内与温度是呈类线性关系的。反相器首尾串联组成的振荡器的振荡频率与温度的非线性关系是引起传感器测量误差的主要原因,本设计通过增大振荡环频率的温度系数来改善这一问题。
1.2 时间-数字转换器的分析与改进
TDC的环形振荡器是本设计的一个重点。理想情况下,TDC应与温度完全无关从而减少量化误差。但直接由标准门级单元组成的TDC[2]存在两个问题——一是振荡环的频率非常高,二是TDC振荡本身对温度比较敏感。过高的振荡频率导致振荡环自热较高,从而通过温度的变化影响了自身精度。如果直接改变TDC振荡延时单元的尺寸来降低振荡环频率,则会造成温度系数过大从而增大TDC的量化误差。直接由标准与门单元构成的TDC,在大于50 ℃高温范围内由于以上原因会导致误差过大不可接受。所以这种TDC只适用在0 ℃~60 ℃[2]的较低温度范围内使用。这是大多现有的相关论文存在的不足之处[2-3]。如何改进这一缺陷使之更适宜用于50~100 ℃范围内的温度测量是本设计的改进的主要目标。
在1.1节中已经说明了振荡环的振荡频率与反相器的级数以及每一级反相器的延时有关,当反相器的级数越少时,振荡环的频率越大。本设计中,考虑到电路的自热问题,通常希望振荡环的频率尽量低。当其他条件不变时,可以通过增大反相器的级数来降低振荡环的频率。由于标准单元延时很小,想要得到能够被计数器采样到的振荡频率,需要数百个反相器,这样显然是不合理的。另一种改变振荡器频率的方式是改变反相器的延时D,上面已经说到,这将改变振荡环的温度系数,从而产生温漂。所以为了减小温漂,设计引入了能够抵消反相器温度系数的电流镜单元。
本设计中的TDC采用了和参考文献[2]相似的结构,如图1中虚线框内所示为TDC的原理图。8比特的粗略计数器对振荡器进行计数[12:5]。当pulse_width的下降沿到来时,粗略计数器停止计数,此时不足一个计数周期的部分被精确编码器追踪并译码成一个5比特的码字。最后量化的结果为粗略计数器与精确编码器两者的输出组合。
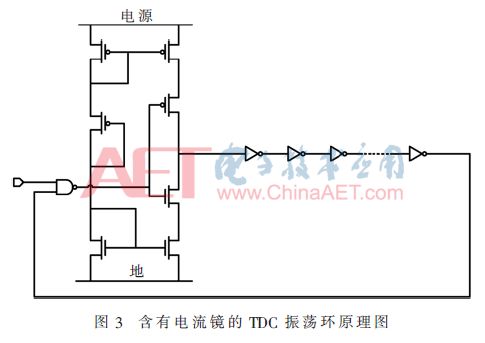
本文的基本思路是利用电流镜的温度补偿作用来构造TDC的振荡环以消除监测温度范围内TDC的温漂。电流镜的工作原理是补偿漏电流以使晶体管的充放电时间改变,从而改变延时单元的延时。含有电流镜的TDC振荡环如图3所示,其仿真结果如图4所示。由仿真结果可知,本设计的电流镜延时具有负温度系数,而反相器的延时在测量范围内具有正温度系数。通过蒙特卡罗仿真结果可以合理分配电流镜延时单元与反相器的数量,使其在所监测的温度范围50 ℃~100 ℃内具有较小的温漂且振荡频率可接受的理想结果。仿真结果显示,这种结构的振荡环可根据具体应用并通过改变反相器尺寸以及电流镜数量来调整温漂接近于0的温度范围以满足应用的需求。与此同时,该结构的振荡频率与标准单元组成的振荡环频率相比有了明显的下降。
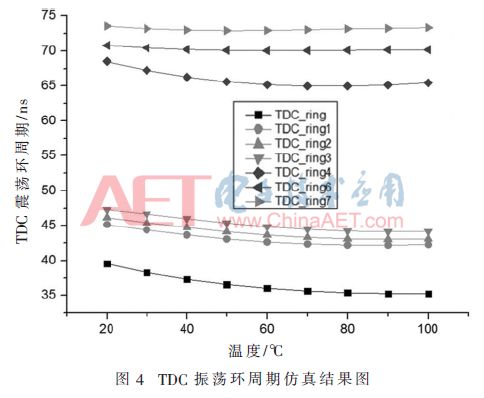
如图4所示,TDC_ringx(x=1,2,3…)代表不同参数下TDC振荡环的周期仿真结果。仿真结果显示通过调整不同的参数可以使带电流镜的延时单元在一定范围内抵消掉反相器延迟链的温度漂移。在本设计中,将这一范围确定为50 ℃~100 ℃。
由于振荡器的振荡会产生一定的自热,自热一方面影响温度检测的准确性,另一方面给电路带来一些不可逆的影响,如加快电路的老化等。当振荡频率过高时,自热尤其严重。基于这些问题,本设计为TDC振荡环中反相器设计恰当的尺寸以降低TDC振荡环的频率,从而减小电路的自热情况。为解决反相器尺寸的改变所引起TDC的温度系数变大这一问题,在TDC的振荡环中加入用于温度补偿的电流镜以使TDC的温漂在检测范围内接近于0,从而使传感器达到应用的需求。
2 电路仿真结果和讨论
2.1 电路功耗的仿真与功率密度计算结果
在本设计中,预定的测量范围在50 ℃~100 ℃范围内温度的测量误差小于-2.8~3.8 ℃。经过调整优化后的TDC功耗与参考文献[2]中所示电路功耗仿真结果对比如表1所示。
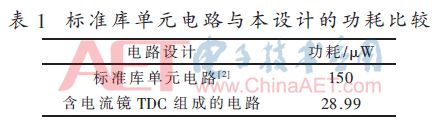
从表1可以看出含电流镜的TDC的功耗相比于参考文献[2]有明显下降,这主要是因为在合理考虑寄生电容的情况下,振荡器的动态功耗计算公式p=αVdd2fC表明功耗和频率成正相关,通过降低频率可以使功耗显著降低。
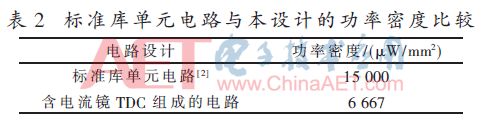
与自热直接相关的是功率密度,即单位面积的功耗。电路的仿真功耗和电路面积,可以根据这些结果计算出电路的功率密度。如表2所示,通过计算可知本设计中的TDC的功率密度仅为参考设计[2]的45%左右。这一结果表明,本设计的结构将有效地减少自热对测量结果的干扰。
2.2 传感器电路主要参数仿真结果
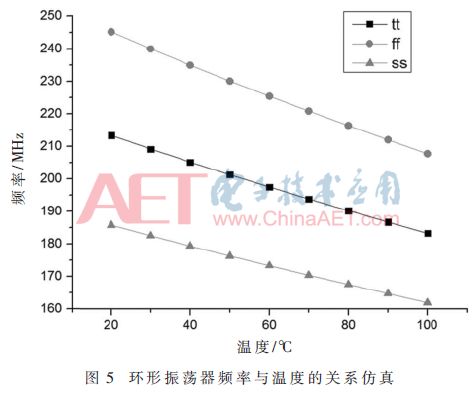
由1.1中所讨论的环形振荡器频率与温度的定量关系可知,频率与温度呈类线性关系,仿真结果如图5所示。由图可知,对于不同的工艺corner而言,频率与温度的关系都是类线性的,满足设计需求。
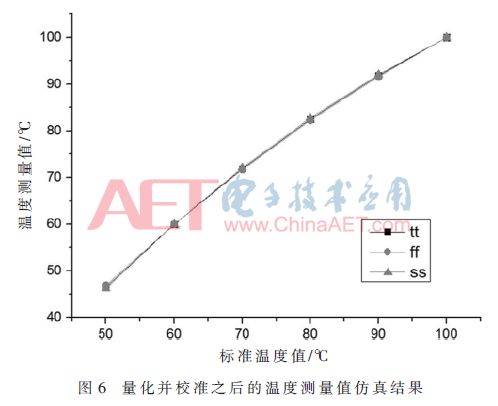
由传感部分得到的与温度相关的时间变量pulse_width,经过TDC的量化并由两点校准之后所得温度测量值的仿真结果如图6所示。可以看出,在50 ℃~100 ℃的温度范围内,传感器的测量误差能满足测量需求。
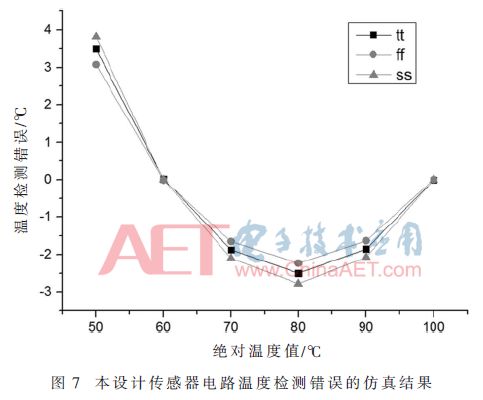
将实测温度与标准温度值进行比较,可以得到测量误差,如图7所示。从图7中可以看出,在50 ℃~100 ℃范围内温度的偏差较小,最高误差仅为-2.8 ℃。满足在预定测量范围内误差较小这一设计需求。
3 结论
本文针对温度对于时域温度传感器电路性能的影响做了相应改进。主要电路改进有两点,第一在于通过改变传感部分振荡器的晶体管尺寸使温度系数放大,从而使该设计能满足应用的精度要求。第二点通过改进TDC振荡环的结构,增加具有电流补偿作用的电流镜使得TDC的温漂在可控的测量范围内接近于0,与此同时降低了TDC的振荡频率从而减小了电路的功耗和自热。最后使测量误差在应用温度范围内减小到可接受范围。通过仿真对比可知,本设计的自热与参考文献[2]相比降低一半以上。可以看出,具有温度补偿效应以减小测量误差的延时单凭借其优势在今后的传感器中将得到更多的关注。
更多精彩阅读:
温度传感器怎么接线图
温度传感器坏了有什么特征
温度传感器的作用
-
温度传感器原理及应用2023-11-24 6748
-
什么是温度传感器?2022-04-25 9487
-
温度传感器电路原理(数字温度传感器电路/pt100温度传感器电路/LM35 温度传感器)2021-10-18 6768
-
冷却液温度传感器结构_冷却液温度传感器功能2020-03-09 4320
-
大赛温度传感器电路2016-03-18 555
-
PN结温度传感器及测温电路原理2010-02-26 26364
-
温度传感器:工业热电偶的结构原理及种类2009-11-07 1783
-
硅温度传感器测温电路2009-04-28 4126
-
传感器温度补偿原理电路2009-04-19 3986
-
集成电路温度传感器电路图2009-04-13 5990
-
铂电阻温度传感器电路2009-02-22 1471
-
温度传感器补偿电路2008-02-27 1314
全部0条评论

快来发表一下你的评论吧 !
