

了解集成式嵌入式视觉平台应用设计
描述
随着摄像头和其他设备产生的数据在快速增长,促使人们运用机器学习从汽车、安防和其他应用产生的影像中提取更多有用的信息。专用器件有望在嵌入式视觉应用中实现高性能机器学习 (ML) 推理。但是此类器件大都处于早期开发阶段,因为设计人员正在努力寻找最有效的算法,甚至人工智能 (AI) 研究人员也在迅速推演新方法。
目前,开发人员一般使用针对 ML 的可用 FPGA 平台来构建嵌入式视觉系统,以期满足更高的性能要求。与此同时,他们可以保持所需的灵活性,以跟上机器学习发展的步伐。
本文将介绍 ML 处理的要求,以及为何 FPGA 能解决许多性能问题。然后,将介绍一个合适的基于 FPGA 的 ML 平台及其使用方法。
机器学习算法和推理引擎
在 ML 算法中,卷积神经网络 (CNN) 已成为图像分类的首选解决方案。其图像识别的准确率非常高,因而得以广泛应用于多种应用,跨越不同的平台,例如智能手机、安防系统和汽车驾驶员辅助系统。作为一种深度神经网络 (DNN),CNN 使用的神经网络架构由专用层构成。在对标注图像进行训练期间,它会从图像中提取特征,并使用这些特征给图像分类(参见“利用现成的软硬件启动机器学习”)。
CNN 开发人员通常在高性能系统或云平台上进行训练,使用图形处理单元 (GPU) 加速在标注图像数据集(通常数以百万计)上训练模型所需的巨量矩阵计算。训练完成之后,训练好的模型用在推理应用中,对视频流中的新图像或帧进行分类。推理部署完成后,训练好的模型仍然需要执行同样的矩阵计算,但由于输入量要少很多,开发人员可以将 CNN 用于在通用硬件上运行的普通机器学习应用(参见“利用 Raspberry Pi 构建机器学习应用”)。
然而,对于许多应用而言,通用平台缺乏在 CNN 推理中同时实现高准确率和高性能所需的性能。优化技术和替代 CNN 架构(如 MobileNet 或 SqueezeNet)有助于降低平台要求,但通常会牺牲准确率并增加推理延时,而这可能与应用要求相冲突。
与此同时,快速发展的算法使得机器学习 IC 的设计工作变得复杂,因为需要机器学习 IC 既要足够专门化以加速推理,又要足够通用化以支持新算法。FPGA 多年来一直扮演着这一特定角色,提供加速关键算法所需的性能和灵活性,解决了通用处理器性能不足或没有专用器件可用的问题。
FPGA 作为机器学习平台
对于机器学习而言,GPU 仍然是标杆——这是早期的 FPGA 根本无法企及的。最近出现的一些器件,如 Intel Arria 10 GX FPGA 和 Lattice Semiconductor ECP5 FPGA,大大缩小了先进 FPGA 和 GPU 之间的差距。对于某些使用紧凑的整数数据类型的 DNN 架构来说,此类 FPGA 的性能/功耗比甚至高于主流 GPU。
高级 FPGA 组合了嵌入式存储器和数字信号处理 (DSP) 资源,对于一般矩阵乘法 (GEMM) 运算能够实现很高的性能。其嵌入式存储器靠近计算引擎,从而缓解了 CPU 存储器瓶颈,而这种瓶颈通常会限制通用处理器上机器学习算法的性能。反之,相比于典型 DSP 器件(图 1),FPGA 上的嵌入式 DSP 计算引擎提供了更多的并行乘法器资源。FPGA 厂商在交付专门用于机器学习的 FPGA 开发平台时充分利用了这些特性。
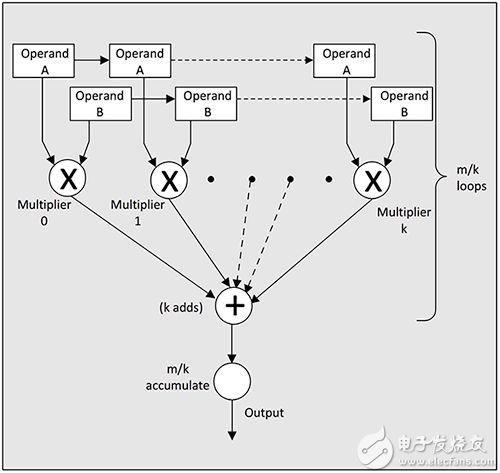
图 1:Lattice Semiconductor ECP5 之类的高级 FPGA 提供了实现高性能推理所需的并行处理资源和嵌入式存储器。(图片来源:Lattice Semiconductor)
例如,Intel 最近推出的支持 FPGA 的 OPENVINO™ 扩展了该平台将推理模型部署到不同类型设备(包括 GPU、CPU 和 FPGA)的能力。在该平台上,开发人员可使用 Intel 的深度学习推理引擎工作流程,其中整合了 Intel 深度学习部署工具包和在 Intel OPENVINO 工具包中提供的 Intel 计算机视觉软件开发套件 (SDK)。开发人员使用 SDK 的应用编程接口 (API) 构建模型,并且可利用 Intel 的运行模型优化器针对不同硬件平台进行优化。
深度学习部署工具包旨在与 Intel DK-DEV-10AX115S-A Arria 10 GX FPGA 开发套件配合使用,让开发人员能从领先的 ML 框架(包括 Caffe 和 TensorFlow)导入训练好的模型(图 2)。在诸如 Arria 10 GX FPGA 开发套件之类目标平台或使用 Arria 10 GX FPGA 器件的定制设计上,工具包中的模型优化器和推理引擎分别处理模型转换和部署。
图 2:支持 FPGA 的 Intel OPENVINO 工具包提供了一套必需的完整工具链,可将在 Caffe、TensorFlow 和其他框架上训练的模型部署到 Arria 10 GX FPGA 开发套件或围绕 Arria 10 GX FPGA 构建的定制设计上。(图片来源:Intel)
为了迁移预训练模型,开发人员使用基于 Python 的模型优化器生成了一个中间表示 (IR),该表示包含在一个提供网络拓扑的 xml 文件和一个以二进制值提供模型参数的 bin 文件中。除了生成 IR 之外,模型优化器还会执行一项关键功能——移除模型中用于训练但对推理毫无作用的层。此外,该工具会在可能的情况下将每个提供独立数学运算的层合并到一个组合层中。
通过这种网络修剪和合并,模型变得更紧凑,进而加快推理时间并减少对目标平台的存储器需求。
Intel 推理引擎是一个 C++ 库,其中包含一组 C++ 类。这些类对于受支持的目标硬件平台来说是通用的,因此可以在各个平台上实现推理。对于推理应用而言,开发人员使用像 CNNNetReader 这样的类来读取 xml 文件 (ReadNetwork) 中包含的 CNN 拓扑以及 bin 文件 (ReadWeights) 中包含的模型参数。模型加载完成后,调用类方法 Infer() 执行阻塞推理,同时调用类方法 StartAsync() 执行异步推理,当推理完成时使用等待或完成例程处理结果。
Intel 在 OPENVINO 环境提供的多个示例应用程序中演示了完整的工作流程和详细的推理引擎 API 调用。例如,安全屏障摄像机示例应用程序展示了使用推理模型流水线,以首先确定车辆边界框(图 3)。流水线中的下一个模型检查了边界框中的内容,识别车辆类别、颜色和车牌位置等车辆属性。
图 3:Intel 安全屏障摄像机示例应用程序演示了使用推理流水线,先识别车辆(绿色边界框),再识别颜色、类型和车牌位置(红色框)等车辆属性,最后识别车牌字符(红色文本)。(图片来源:Intel Corp.)
流水线中的最后一个模型使用这些车辆属性从车牌中提取字符。为了使用该模型进行推理,示例代码显示了利用推理模型 C++ 库创建对象 (LPR),而该对象则是名为 LPRDetection 的结构的一个实例。此结构使用推理引擎 API 类对象来读取 (CNNNetReader) 并验证模型输入和输出(列表 1)。
副本 CNNNetwork read() override {
std::cout << "[ INFO ] Loading network files for Licence Plate Recognition (LPR)" << std::endl;
CNNNetReader netReader;
/** Read network model **/
netReader.ReadNetwork(FLAGS_m_lpr);
std::cout << "[ INFO ] Batch size is forced to 1 for LPR Network" << std::endl;
netReader.getNetwork().setBatchSize(1);
/** Extract model name and load it's weights **/
std::string binFileName = fileNameNoExt(FLAGS_m_lpr) + ".bin";
netReader.ReadWeights(binFileName);
/** LPR network should have 2 inputs (and second is just a stub) and one output **/
// ---------------------------Check inputs
std::cout << "[ INFO ] Checking LPR Network inputs" << std::endl;
InputsDataMap inputInfo(netReader.getNetwork().getInputsInfo());
if (inputInfo.size() != 2) {
throw std::logic_error("LPR should have 2 inputs");
}
InputInfo::Ptr& inputInfoFirst = inputInfo.begin()->second;
inputInfoFirst->setInputPrecision(Precision::U8);
inputInfoFirst->getInputData()->setLayout(Layout::NCHW);
inputImageName = inputInfo.begin()->first;
auto sequenceInput = (++inputInfo.begin());
inputSeqName = sequenceInput->first;
if (sequenceInput->second->getTensorDesc().getDims()[0] != maxSequenceSizePerPlate) {
throw std::logic_error("LPR post-processing assumes certain maximum sequences");
}
// ---------------------------Check outputs
std::cout << "[ INFO ] Checking LPR Network outputs" << std::endl;
OutputsDataMap outputInfo(netReader.getNetwork().getOutputsInfo());
if (outputInfo.size() != 1) {
throw std::logic_error("LPR should have 1 output");
}
outputName = outputInfo.begin()->first;
std::cout << "[ INFO ] Loading LPR model to the "<< FLAGS_d_lpr << " plugin" << std::endl;
_enabled = true;
return netReader.getNetwork();
}
列表 1:此代码片段来自 Intel OPENVINO 工具包中的安全屏障摄像机示例应用程序,演示了使用 Intel 推理引擎 C++ 库 API 将模型及其参数读入推理引擎的设计模式。(代码来源:Intel)
为了执行推理,该代码加载数据并调用 submitRequest 方法,该方法启动推理周期并等待结果,然后显示识别的车牌字符(列表 2)。
副本 if (LPR.enabled()) { // licence plate
// expanding a bounding box a bit, better for the license plate recognition
result.location.x -= 5;
result.location.y -= 5;
result.location.width += 10;
result.location.height += 10;
auto clippedRect = result.location & cv::Rect(0, 0, width, height);
cv::Mat Plate = frame(clippedRect);
// ----------------------------Run License Plate Recognition
LPR.enqueue(Plate);
t0 = std::chrono::high_resolution_clock::now();
LPR.submitRequest();
LPR.wait();
t1 = std::chrono::high_resolution_clock::now();
LPRNetworktime += std::chrono::duration_cast(t1 - t0);
LPRInferred++;
// ----------------------------Process outputs
cv::putText(frame,
LPR.GetLicencePlateText(),
cv::Point2f(result.location.x, result.location.y + result.location.height + 15),
cv::FONT_HERSHEY_COMPLEX_SMALL,
0.8,
cv::Scalar(0, 0, 255));
if (FLAGS_r) {
std::cout << "License Plate Recognition results:" << LPR.GetLicencePlateText() << std::endl;
}
}
cv::rectangle(frame, result.location, cv::Scalar(0, 0, 255), 2);
}
列表 2:此代码片段来自 Intel OPENVINO 工具包中的安全屏障摄像机示例应用程序,展示了加载模型、执行推理和生成结果的设计模式。(代码来源:Intel)
集成式嵌入式视觉平台
Intel 的 OPENVINO 方法强调平台重定向,而 Lattice 的 SensAI 平台完全聚焦于 FPGA 推理。SensAI 平台的特性之一是为 DNN 架构(包括 CNN 和一个称为二值化神经网络 (BNN) 的紧凑架构)提供 FPGA IP。针对嵌入式视觉,SensAI CNN IP 为完整的推理引擎提供框架,将控制子系统、存储器、输入和输出的接口与实现不同类型模型层(包括卷积、BatchNorm 归一化、ReLu 激活、池化和其他)的资源结合在一起(图 4)。
图 4:Lattice Semiconductor CNN IP 实现了一个完整的推理系统框架,将专用引擎和用于控制、存储器、输入、输出的接口结合在一起。(图片来源:Lattice Semiconductor)
为了实现 CNN 模型,开发人员首先要在针对 ECP5 FPGA 的 Lattice Diamond 设计环境中或针对其他 Lattice FPGA 系列的 Radiant 设计环境中,利用 Lattice Clarity 配置工具配置 CNN。这里,开发人员可以指定模型类型(CNN 或 BNN)、卷积引擎数(最多 8 个)及每层的内部存储大小(最多 16 Kb)或二进制大对象 (blob)。配置 CNN 之后,开发人员使用设计环境生成核心,作为 FPGA 比特流。
开发人员单独将通过 Caffe 或 TensorFlow 开发并训练好的模型导入 SensAI 平台。这里,Lattice 神经网络编译器将训练好的 Caffe 或 TensorFlow 模型转换为一组包含神经网络模型参数和执行命令序列的文件。SensAI 平台将来自设计环境和编译器的单独输出一起并入 FPGA,以提供最终的推理模型(图 5)。
图 5:Lattice Semiconductor SensAI 平台将其 CNN 和 BNN IP 与其神经网络编译器结合在一起,使开发人员能够转换 Caffe 或 TensorFlow 模型,以在 Lattice FPGA 上作为推理引擎来运行。(图片来源:Lattice Semiconductor)
针对嵌入式视觉应用,Lattice LF-EVDK1-EVN 嵌入式视觉开发套件 (EVDK) 为运行 CNN 模型推理提供了理想的目标平台。EVDK 提供了一个完整的 80 x 80 mm 三板堆叠式视频平台,包括 Lattice CrossLink 视频输入板、带 ECP5 FPGA 的处理器板和 HDMI 输出板。开发人员可以将 EVDK 用作 Lattice 提供的多个示例 CNN 应用的目标平台。例如,Lattice 速度标志检测参考设计运用 EVDK 来展示 SensAI CNN IP 在典型汽车应用中的应用(图 6)。
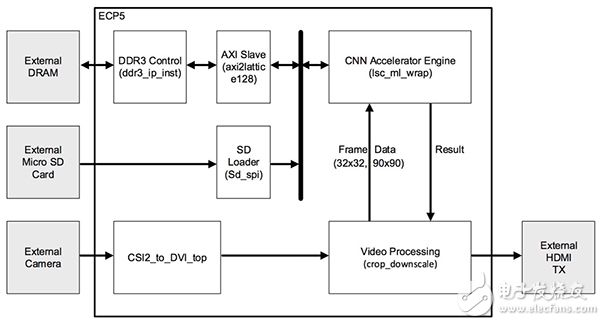
图 6:Lattice Semiconductor 速度标志检测参考设计利用 SensAI 平台和 Lattice LF_EVDK1-EVN 嵌入式视觉开发套件提供一个完整的推理应用,开发人员可以对其立即操作或详细探索。(图片来源:Lattice Semiconductor)
此示例应用程序的项目文件包括全套文件,从 Caffe caffemodel 和 TensorFlow pb 格式的模型开始。因此,开发人员可以探索这些模型的细节。例如,使用 TensorFlow import_pb_to_tensorboard.py 实用程序,开发人员可以导入 Lattice 提供的 pb 模型,以查看此示例应用程序中使用的 CNN 的细节(图 7)。本例中,所提供的模型是由四个“Fire”模块组成的序列,每个模块包括:
-
Conv2D 层,执行 3 x 3 卷积以从输入流中提取特征
-
激活层,执行 BatchNorm 归一化,然后执行修正线性单元 (ReLU) 激活
-
MaxPool 池化层,用于对前一层的输出进行采样
图 7:Lattice 速度标志检测示例应用程序包括 TensorFlow pb 模型,开发人员可以将其导入 TensorBoard 进行详细检查。注意:数据向上流过此图中的各层。(图片来源:Digi-Key Electronics)
开发人员可以使用 SensAI 平台生成模型文件,完成前面描述的模型流程。或者,开发人员可以使用所提供的文件直接跳转到部署阶段。任一情况下,文件都是通过接有适配器的 microSD 卡加载到 EVDK 中。
在操作中,EVDK 上的摄像机向 ECP5 FPGA 提供视频流,其中配置的 CNN 加速器 IP 执行命令序列以执行推理。同任何推理引擎一样,每个输出通道都会产生一个结果,指出与该输出通道相关联的标签即为输入图像的校正标签的概率。本例中,模型是用每小时 25、30、35、40、45、50、55、60 和 65 英里的限速标志的标注图像进行训练的。因此,当模型在其输入字段中的任何位置检测到限速标志时,它会显示检测到的标志对应于每小时 25、30、35、40、45、50、55、60 或 65 英里限速的概率(图 8)。
图 8:Lattice 速度标志检测演示运行在 Lattice EVDK 上,对视频输入流执行推理,生成输出值,指示捕获到的图像对应于与该特定输出相关联的标签的可能性。本例中,它显示限速标志最有可能是 25 mph。(图片来源:Lattice Semiconductor)
总结
为在嵌入式视觉应用中运用机器学习,开发人员使用可用硬件平台实现所需性能水平的能力受到了限制。然而,高性能 FPGA 的出现使得开发人员可以构建性能接近 GPU 的推理引擎。采用专为嵌入式视觉设计的机器学习 FPGA 平台,开发人员可以专注于特定需求,使用标准机器学习框架训练模型,并依靠 FPGA 平台实现高性能推理。
-
嵌入式视觉的发展机遇2019-05-16 0
-
嵌入式视觉技术是什么?2019-08-22 0
-
简单梳理一下嵌入式视觉领域的主流硬件平台2021-12-23 0
-
嵌入式视觉技术--潜力巨大,有待开发2014-08-20 2745
-
嵌入式系统初级了解2016-03-17 486
-
嵌入式视觉技术2018-09-14 365
-
关于嵌入式系统以及嵌入式平台下的学科分工详解2018-10-30 2141
-
嵌入式视觉的最新趋势讨论2018-11-22 3034
-
康佳携嵌入式计算机和嵌入式视觉技术融合的嵌入式视觉平台惊艳亮相2018-11-25 1209
-
嵌入式技术无处不在,嵌入式视觉系统的简介2020-03-12 1310
-
嵌入式工业相机在机器视觉中有什么样的应用2021-03-08 2020
-
嵌入式机器视觉系统设计2021-07-30 986
-
浅析MATLAB和Simulink嵌入式视觉应用2021-11-22 4090
-
使用Lattice mVision打造嵌入式视觉系统解决方案2025-03-06 437
全部0条评论

快来发表一下你的评论吧 !
