

自制红外线障碍物探测器电路
描述
这种红外线障碍物探测器不仅能用于机器人行进跟踪控制,而且还可作为家庭和商店自动控制系统的重要部分。
电路核心部分采用一只红外线发射LED(IR1)和一只红外线接收二极管(IR2)。用5V稳定直流电压对电路供电。工作时由IR1向外发射不可见的红外线短光束,经障碍物或目标反射后由IR2接收。探测到障碍物后,由扬声器LS1发出提示告警。LED1用于电源接通指示。IR1和IR2可以采用现成的集成光反射传感器CNY70,也可以用独立的IR1和IR2自行组合。
图1是探测器电路。电路中的LM555芯片(IC1)接成多谐振动器.其输出脉冲宽度可在1ms-10ms范围内用VR1、R1、R2和C1任意调节。输出脉冲由IC1③脚输出,经小功率晶体管T1缓冲后驱动红外线发射管IR1,R4用来限制IR1的输入电流。
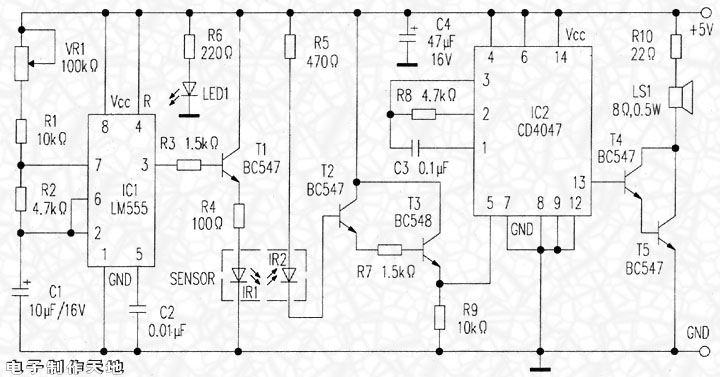
当反射后的红外光束落到IR2上时,R5有电流流过,使T2基极获得正电压而导通,导通后又使报警驱动晶体管,T3保持正偏,直至障碍物被清除为止。
T3导通后,电路第二只多谐振荡器CD4047(IC2)由于其⑤脚变高电位而激活,振荡频率为音频可闻信号,经达林顿对管T4和T5放大后用扬声器LS1放声,R10用来限制扬声器电流。
电路如用于控制机器人的行进路线.可利用T3的高电平输出直接控制机器人内部的继电器/马达驱动电路。此电路探测障碍物的有效范围为10cm。
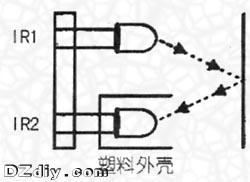
图2是IR1和IR2的安装示意图。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
红外线障碍物探测器相关资料分享2021-04-28 1883
-
红外线探测器原理_红外线探测器怎么安装2021-01-12 7769
-
苹果再获得激光专利:“障碍物探测”系统2020-12-10 2431
-
红外线探测器是干什么的_红外线探测器有摄像功能吗2020-08-13 38358
-
红外线探测器哪个牌子好2019-02-28 16382
-
红外线探测器工作原理2019-02-27 24617
-
用于汽车防撞的红外线测距系统2018-11-05 3592
-
求助~~红外线探测电路/2014-06-16 2966
-
做卷帘门障碍物探测器,求指教!2013-08-24 3285
-
红外线探测防盗报警器电路2011-04-26 6297
-
用单片机控制红外编码探测障碍物2009-03-29 2065
全部0条评论

快来发表一下你的评论吧 !
