

采用PLC与变频控制技术相结合实现自动扶梯节能控制系统的设计
描述
1 、引言
自动扶梯广泛应用于大型商场、超市、机场、地铁、宾馆等场合。大多数扶梯在客流量大的时候,工作于额定的运行状态,在没有乘客时仍以额定速度运行,具有耗能大、机械磨损严重、使用寿命低等缺点。采用PLC与变频控制相结合的节能控制系统,已成为自动扶梯控制技术的发展方向。
带有节能效果的自动扶梯具有以下特点:
(1)无人乘梯时,扶梯自动平稳过渡到节能运行,以1/5额定速度运行(可以选择当无人乘梯时,扶梯自动停止的功能);
(2)有人乘梯时,扶梯立即自动平稳过渡到额定速度运行;
(3)由于节能运行时速度很低,机械部分的磨损大大降低,相对延长了扶梯的使用寿命;
(4)变频技术的采用大大降低了扶梯启动时对电网的冲击。
目前节能扶梯大多形式和功能单一,仅能实现简单的快慢循环或快停循环。本系统设计的亮点是快慢循环和快慢停循环是可以通过程序进行自由选择的,系统同时集成了上下梯级遗失、防驱动链断链、防逆转及故障保护输出等功能,并可通过程序内部辅助继电器的状态监控扶梯运行状态,现场调试十分方便。
2 、自动扶梯变频节能控制方式
2.1 变频非自启动(快慢循环)
2.1.1 功能描述
通过增加变频器来控制扶梯运行的速度,当梯上有乘客时,扶梯以高速运行(例如额定速度),提高客流量,当乘客检测装置在一段时间内没有检测到乘客通过时,扶梯开始减速转为低速运行(例如0.2m/s,参数可设置),此时一直处于待机运行中,即为非自启动节能。
2.1.2 运行状态描述
变频控制,无人时低速,有人时高速。高速运行时间记为TQ,可通过PLC程序进行设置,具体时间根据梯的提升高度和速度而定。
2.1.3 运行步骤
(1) 当扶梯上电停止等待,有方向(比如上行)开始运行时,此时扶梯以低速开始节能运行进入待机等待。
(2) 下机房乘客检测装置检测是否有人通过,当有人通过时,控制器内部的高速运行时间计数器(记为TC)清零,此时扶梯开始缓慢加速至高速运行。
(3)高速运行时间计数器(记为TC)开始计数,当TC
(4) 当有一段时间没人乘梯即TC≥TQ时,扶梯又开始减速进入低速运行待机等待状态,如此循环往复运行。
图1为自动扶梯快慢循环控制时序图。
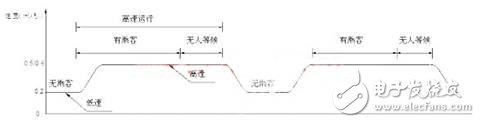
图1 自动扶梯快慢循环控制时序图
2.1.4 功能实现
安装在扶梯入口处的乘客检测装置检测是否有人乘梯。
2.2 变频自启动(快慢停循环)
2.2.1 功能描述
通过增加变频器来控制扶梯运行的速度,当梯上有乘客时,扶梯以高速运行(例如额定速度),提高客流量,当乘客检测装置在一段时间内没有检测到乘客通过时,扶梯开始减速转为低速运行(例如0.2m/s,参数可设置),当乘客检测装置在一段时间内又没检测到乘客乘梯时,扶梯开始进入停止运行等待状态,即为自启动节能。
2.2.2 运行状态描述
变频控制,长时间无人乘梯时停止,有人乘梯时高速运行。高速运行时间记为TQ,低速运行时间TS,两个参数可通过PLC程序进行设置,具体时间根据梯的提升高度和速度而定。
2.2.3 运行步骤
(1) 当扶梯上电停止等待,有方向(比如上行)开始运行时,此时扶梯进入上行停止等待运行中。
(2) 下机房光电检测装置检测是否有人通过,当有人通过时,控制器内部的高速运行时间计数器(记为TC)清零,此时扶梯开始缓慢加速至高速运行。
(3) 高速运行时间计数器(记为TC)开始计时,当TC
(4)当有一段时间没人乘梯即TC≥TQ时,扶梯开始减速进入低速运行状态中。
(5) 低速运行时间计数器(记为TSC)开始计时,当TSC《 TS时,若此时有人进入,TC清零重新开始计时,扶梯加速至高速运行状态,又进入高速运行状态中。
(6) 当一段时间内没人乘梯即TSC≥TS时,扶梯停止运行进入等待中,如此循环往复运行。
图2为自动扶梯快慢停循环控制时序图。
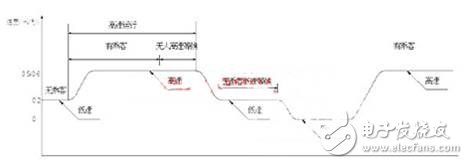
图2 自动扶梯快慢停循环控制时序图
2.2.4 功能实现
安装在扶梯入口处的乘客检测装置检测是否有人乘梯。但是为了确保乘客的安全,按照GB16899-1997《自动扶梯和自动人行道的制造与安装安全规范》的要求:自启动的扶梯,应在该使用者走到梳齿相交线之前启动运行,故乘客检测装置应满足以下要求:
(1) 检测装置应满足的要求
·光束,应设置在梳齿相交线之前至少1.3m外;
·触点踏垫,其外缘应设置在梳齿相交线之前至少1.8m处,沿运行方向的触点踏垫长度至少为0.85m。施加在其表面为25mm2的任何点上的载荷达到150N之前就应作出响应。
(1) 在实际设计时可选择
· 安装在扶手进出口处的光电漫发射装置;
·安装在盖板进口处的光柱;
·安装在盖板下的踏垫自启动装置来实现。
本系统设计时选择光电漫反射装置,能够确保每一个从不同方向走过来的乘客都能被有效的探测到,从而实现自启动的功能。
3 、系统设计
3.1 控制系统组成
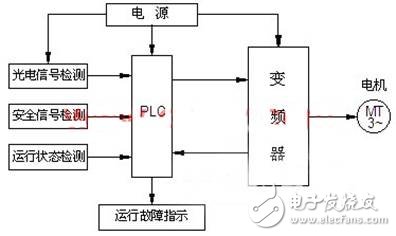
图3 控制系统框图
由图3可知,该系统主要由以下几部分组成:电源、PLC、变频器等。PLC是控制系统的核心,PLC根据输入的光电信号是否有效确定高速运行指令的输出,变频器根据PLC的高速运行指令控制扶梯的运行速度,完成扶梯的快慢及快慢停循环运行。
3.2 硬件选型
以自动扶梯变频非自启动(快慢循环)为例,其扶梯控制系统实际需要输入11点,输出7点,PLC主控制器采用欧姆龙CPM1A-20CDR-A-V1型PLC。这种机型的PLC配有相应的编程软件CX-Programmer进行编程及监视,不仅可以通过手持编程器对PLC编程,也可在个人PC机上进行编程。在扶梯运行过程中,可通过程序内部辅助继电器的状态监控电梯运行状态,现场调试十分方便。
变频器采用汇川公司的MD320变频器。MD系列变频器具备完善的输入输出接口,全系列独立风道和散热器柜内柜外安装可选,可以提供接近IP54防护要求的解决方案,其系统设计尤其适合恒转矩负载使用。
4 、系统设计
4.1 变频控制主电路
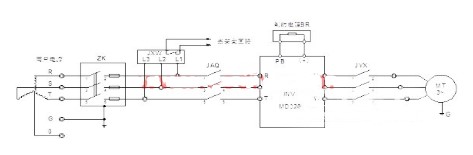
图4 变频控制主回路
图4示出主回路主要由主空开ZK、相序保护继电器JXW、安全接触器JAQ、运行接触器JYX、主电机MT等组成。
4.2 PLC输入输出口分配
输入输出口分配如附表所示。
附表 输入输出口分配表

4.3 运行控制回路
图5为运行控制回路。
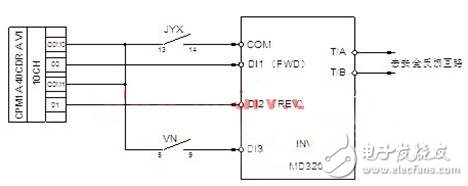
图5 运行控制回路
扶梯的运行控制由PLC与变频器一起完成。下面以变频非自启动(快慢循环)为例介绍扶梯节能运行工作原理。
变频器实时监测PLC的输出信号,从而决定扶梯的下一步运行。例如(1)扶梯的方向控制:当变频器的端子DI1接收到PLC的信号时,输出正转,扶梯实现上行运行;反之,端子DI2有效时,输出反转,扶梯实现下行运行。(2)高速运行的控制:变频器内预先设定好多段速控制的速度频率,扶梯以节能低速待机运行时,只有运行接触器(JYX)吸合,当PLC检测到光电信号时,输出高速运行指令信号,此时高速运行接触器(VN)吸合,变频器端子DI3有效,扶梯立即平稳的加速到设定频率高速运行。
4.4 典型控制程序设计
下面针对程序中的运行方式、节能时间控制两个子程序作重点介绍。
4.4.1 变频非自启动(快慢循环)和自启动(快慢停循环)方式的选择
方式的选择见图6。
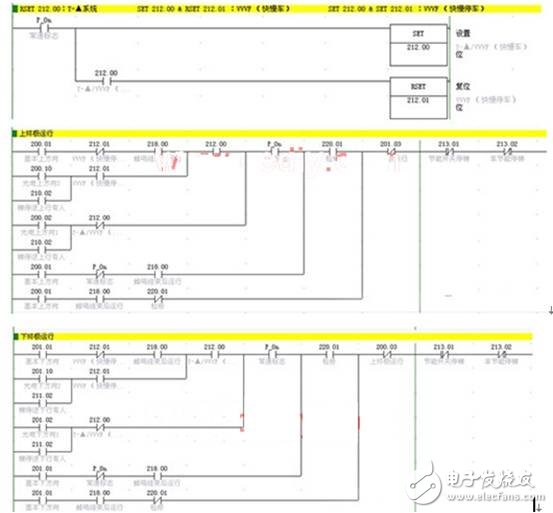
图6 快慢循环和快慢停循环子程序
只需修改程序中的SET和RSET 的组合,即可实现两种不同运行方式的切换。
快慢循环,设置为SET 212.00和RSET 212.01。
快慢停循环,设置为SET 212.00和SET 212.01。
4.4.2 节能时间的控制
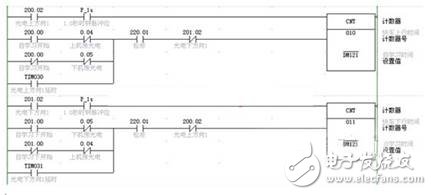
图7 节能时间的子程序
快车运行保持时间,可由上述计数器设定,从而能够满足不同提升高度和速度的扶梯使用(见图7)。
4.5 试验数据
为了验证本系统的节能效果,我们选择某现场进行测试。现场曳引电机功率为7.5kW,对比变频节能控制与普通Y-△控制的扶梯电量消耗。扶梯有乘客使用与空载运行时,各测试4个小时。实际测试下来采用节能的扶梯,满载运行时,耗电25.3kWh,而使用普通Y-△控制扶梯耗电26kWh;空载运行时,耗电1.8kWh,而使用普通Y-△控制扶梯耗电8.4kWh。从这个实例可以看出,变频节能控制的扶梯比普通Y-△控制的扶梯节能22%。
而如果采用无人乘梯时让扶梯停下来,与改造之前相比可节能约30%。实际使用中,如果扶梯慢下来或者停下来的时间越长,节能效果越明显。
5 、结束语
该设计已经广泛应用于扶梯的节能改造,目前已在武汉、上海等大城市有三百多台被安装使用。实践证明,采用基于PLC及变频器控制的扶梯节能系统可靠、运行稳定,很有效的节约了用户的使用成本。
责任编辑:gt
-
自动扶梯楼层板振动分析2023-09-14 701
-
怎么实现基于PLC和变频器的双馈电动机节能控制系统设计?2021-05-31 1845
-
变频器使用自动扶梯的好处2021-01-19 2452
-
新型Violeds UVLED技术被应用在自动扶梯扶手杀菌2020-12-11 1264
-
商场自动扶梯节能改造监测报告2019-09-18 2544
-
利用单片机控制的自动扶梯控制系统原理是什么?2018-07-24 5120
-
基于AVR的自动扶梯2018-02-20 1957
-
自动扶梯控制系统分析2017-10-16 5016
-
基于ATMEL单片机的自动扶梯控制系统2017-09-01 872
-
地铁站变频自动扶梯节能原理及效果分析2016-04-25 858
-
一种自动扶梯节能方式的设计2009-09-17 720
-
触摸屏结合PLC在变频节能系统中的应用2009-06-18 752
-
自动扶梯的接地安全保护电路2009-02-27 1807
全部0条评论

快来发表一下你的评论吧 !
