

采用UGN3175型锁存型霍尔集成电路实现无刷力矩电机驱动电路的设计
描述
1、 引言
某特殊用途无刷力矩电机的转子位置传感器原为光电传感器,因为用途改变,其转子位置传感器、安装方式和驱动电路等均需另行设计,原电机的可用部分只有定子和转子,用其作为电机并不完整,无安装外壳和转子支撑轴,而且也无内嵌于电机中的转子位置传感器,要使其正常运转,需要设计安装外壳、转子支撑轴,转子位置传感器和相应的驱动电路。
2、 无刷力矩电机驱动电路
2.1 UGN3175型转子位置传感器及其放置方法
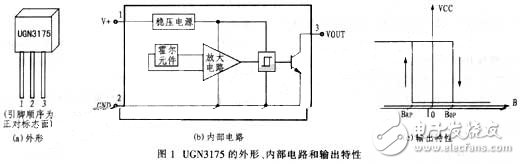
锁存型霍尔集成电路(磁敏式位置传感器)是一种开关型电路,其动作值BOP和返回值BRP相对S极和N极是对称动作的,如图1(c)所示。UGN3175锁存型霍尔集成电路是一种对称双极性开关,其外形、内部电路及输出特性如图1所示,它的动作区在S极,返回区在N极。在S极的某一磁感应强度(≥BOP)下,UGN3175的输出是导通状态(ON高电平),当S极逐渐离开该IC、磁感应强度为零时,UGN3175的输出仍然保持导通状态。只有磁场转变为N极并达到BRP值时,UGN3175输出才翻转为截止状态(OFF低电平),这种电路在S-N-S-N交替变化磁场下的输出波形占空比接近50%,适合于有多极环形永磁转子的无刷直流电动机位置检测。
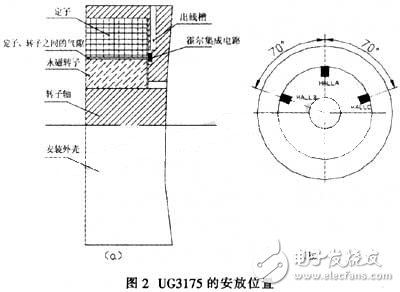
因定子已经成形,霍尔集成电路不能内嵌于对应绕组的定子槽中,实际使用中对应三相绕组应合理放置3个霍尔集成电路,如图2所示。该型无刷力矩电机定子分为36槽,每槽对应弧度为10°,定子为12极,每极极面对应槽数为3,电机技术条件中规定A、B、C三相引出线及星形接线的中心点引出线绑扎后于第36槽与1号槽(1号槽对应为A相绕组)之间引出,以此线束结点为定位基准,霍尔集成电路以顺时针70°夹角放置可分别对应B、A、C三相绕组,这样可避免因尺寸所限不能安装于同一极面下。转子为永磁体,镶嵌在非导磁材料中,侧面磁场极弱,不能触发霍尔集成电路动作,所以应使UGN3175标志面(标志面感应S极时输出高电平)正对定子和转子之间的气隙漏磁通。由运转中的转子上的永磁体磁场触发霍尔集成电路动作(Vout引脚的高低电平变化)产生位置信号。
2.2 MSK4364的功能
MSK4364是M.S.Kennedy公司生产的三相无刷电机MOSFET桥驱动电路,允许电机控制电压为55V,输出电流为5A。内部具有霍尔传感器信号处理电路、三相MOSFET桥PWM输出电路及闭环力矩控制电路等,原理框图如图3所示。
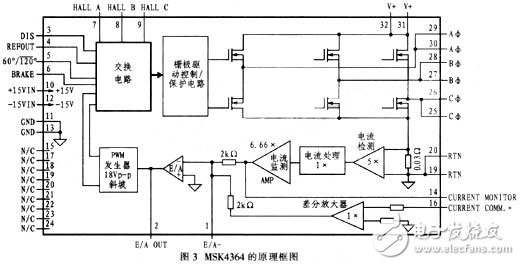
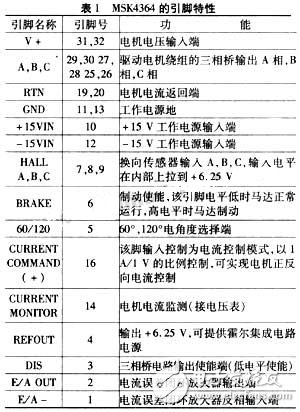
MSK4364的1引脚和2引脚之间可接入阻容网络电路以实现闭环力矩控制。刹车控制时制动使能脚6置为高电平,进入制动操作状态,三相桥高端的3个功率管关断,低端的3个功率管同时对地导通,电机三相绕组对地短接能耗制动使电机迅速停转。各个引脚的功能见表1。
2.3 驱动电路
如图4所示,该电路可以实现三相无刷力矩电机的驱动,并可通过调节LM117的输出电压或RADJ的阻值控制无刷力矩电机的工作电流。
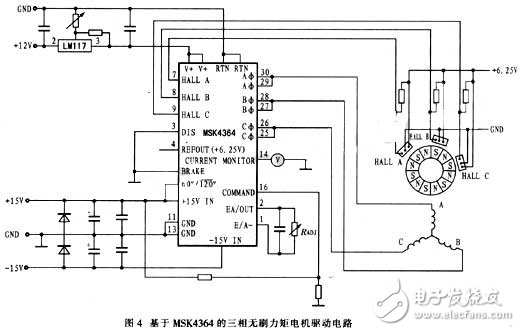
(1)MSK4364的模拟地均应接在GND(11,13)引脚,功率地RTN已于模块内部连接至GND引脚,因此不能在外部重复连接,以免引起干扰。
(2)应该在V+引脚与RTN引脚之间并接一只470μF以上的电容器,以抑制电子开关高频开断时产生的干扰,该电容器应尽可能靠近模块放置。±15V与GND引脚间也应并联一只10μF的滤波电容器。
(3)所有大电流回路都应尽可能短,并应尽量使用厚覆铜线布线以降低EMI。
(4)接线时应使霍尔集成电路ABC三相、电机ABC三相、MSK4364的ABC三相输出、霍尔信号三相输入保持正确的对应关系,否则电机不能正常运转,并会出现不转、反转或强烈震动的现象。
三路霍尔信号输入端可加去耦电容器抑制干扰和增加系统稳定性。
3 、结束语
采用UGN3175型锁存型霍尔集成电路作为转子位置传感器,以MSK4364作为位置信号处理和驱动电路,完全能够实现无刷力矩电机的驱动电路。
该电路使用在某型力矩电机中,可实现较宽范围的力矩电流和转速调节,经实践证明,完全能满足运行要求的相关技术指标。
-
电机控制专用集成电路PDF版2025-04-22 5197
-
什么是力矩电机2023-06-12 4294
-
SDC1181锁存型霍尔开关集成电路中文手册2022-12-14 961
-
高压双极锁存霍尔芯片AH401替代霍尼韦尔SS41F实现无刷直流电机精确控制2022-05-06 3044
-
请问开关型霍尔集成电路有何作用?2021-03-18 2004
-
华芯霍尔元件锁存型HX6573介绍2020-06-20 1858
-
无刷直流电机 高压双极锁存性霍尔开关 电机驱动FS177芯片2019-11-13 834
-
150种各类电机控制的集成电路与应用实例2019-10-10 22599
-
SEC锁存型霍尔SS1881 高灵敏度霍尔SS1881 超强温度适应性霍尔SS18812019-05-13 866
-
开关型霍尔集成电路的判别及应用2016-08-22 1008
-
SEC霍尔SS569双极锁存型霍尔效应传感器2014-07-29 3020
-
双极锁存型霍尔传感器US1881基本介绍及应用2013-08-22 6299
-
SS732 -- (锁存型霍尔效应传感器)原理及介绍2013-03-28 4068
全部0条评论

快来发表一下你的评论吧 !
