

利用C8051F系列单片机实现CAN总线隔离器的设计方案
描述
1 、引言
CAN(Controller Area Network),即控制器局域网,是应用最广泛的现场总线之一,CAN总线以其实时性强,可靠性高,结构简单,互操作性好,价格低廉等优点,可应用于高速网络和低成本的线路网络。这里提出一种CAN总线隔离器的通讯系统,将其应用于某飞行器到地面的通讯网络,实现飞行器和地面的速度隔离,从而使飞行器和地面之间能够稳定实时通信。该系统设计在分析CAN总线2.0B协议的基础上,采用结构化方法独立设计飞行器和地面双方的通信协议。底层模块的硬件设计是以C8051F040高速型单片机为核心,其内部集成CAN协议控制器,因而只需增加CAN收发器就可实现CAN智能节点设计,比传统的由单片机与CAN 协议控制器共同组成的CAN节点更简单,可靠,易操作。而CAN总线应用层协议由用户自行定义编写,使其更符合该系统设计要求。目前整个系统运行良好,性能稳定,通信冗余度好,符合工业现场使用要求。
2 、基于C8051F040的CAN智能节点设计
图1是基于C8051F040的CAN总线硬件接口原理电路图。通过C8051F040内部所集成的CAN控制器,为了增强系统的抗十扰能力,在CAN控制器与TJA1040之间接入光电耦合器6N137,从而实现TJA1040与外界CAN通信。事实上,集成收发器TJA1040本身具有瞬间抗干扰能力,可保护总线,降低射频干扰,以实现热保护功能。因此,在干扰不严重的廊用场合,无需增加光电隔离,使得系统达到最大通信速率或距离。如果使用光电隔离器,应尽量选用高速光电隔离器,以减少CAN总线有效回路信号传输的延时时间。由于CAN隔离器需通过CAN总线采集输入输出模块的数据信息,干扰较大,为了系统的稳定可靠性,需加光电隔离器。通过CAN2.0B兼容CAN2.0A协议的连接通讯测试,光电耦合器6N137上升时间为30 ns(典型值),隔离电压为3 000 V,其支持最大频率值超过30 MHz。
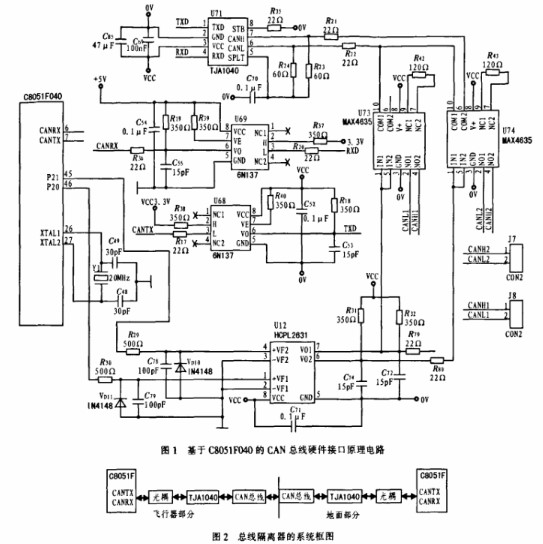
为实现系统的稳定可靠性,该系统设计采用冗余设计,利用双通道光耦HCPL2631隔离并产生控制信号,控制两个单刀双掷开关MAX4635,从而实现CAN智能节点的切换。
3 、CAN总线隔离器设计
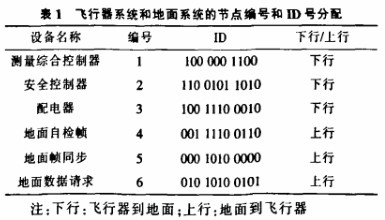
该系统设计的CAN总线隔离主要由发送和接收两部分组成。发送和接收部分都由数据指令配置、数据处理和数据传输3个单元组成,如图2所示。其中发送部分:上位机指令配置完后,通过FPGA传输给单片机,单片机利用自身所带的CAN总线,经隔离处理后到达总线驱动器,然后通过CAN总线输出数据。而接收部分正好相反。该系统设计将飞行器速度设置为500 kHz,地面速度设置为50 km/s,从而更好模拟飞行器和地面的通信。
4 、隔离器收发双方通信协议
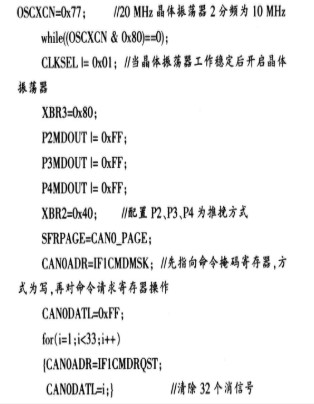
总线隔离器分为飞行器高速接口和地面低速接口两部分,要求隔离器能通过所有地面上行到飞行器的数据。本系统CAN总线采用主从方式,所有总线数据统一采用数据帧,不用远程帧,数据长度最大为8字节,最小为0字节。根据数据链路层协议,仲裁场标准标识符共11位(ID1O“ID0),系统通过标识符确定数据传输的优先级。本协议规定,ID除表示优先级外,还是数据接收目的节点、数据发送源节点与数据类型。具体说明11位ID:ID(ID的0~3位)为数据接收目的节点;ID(ID的4”7位)为数据发送的源节点;ID(ID的8“10位)为数据类型。
本协议中,飞行器系统和地面系统都有3个节点,节点编号和ID号如表1所示。
5、 CAN隔离器的软件设计
5.1 CAN总线初始化
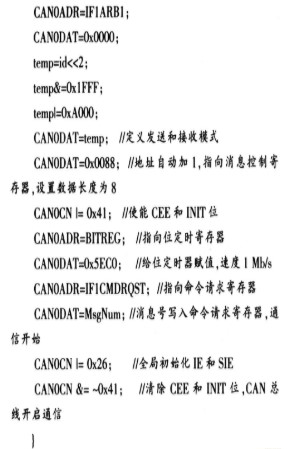
CAN总线初始化包括:I/O的配置、外部晶体振荡器的配置、CAN总线的开闭、发送和接收初始化。初始化程序如下:
void initial_can(unsigned char MsgNum,unsignedl int id)
{SFRPAGE=CONFIG_PAGE;
5.2 发送和接收程序
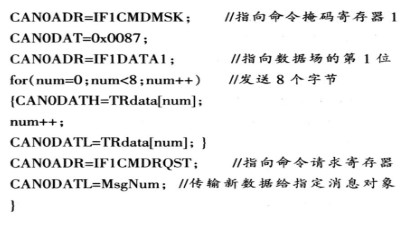
CAN报文发送是由CAN控制器自动完成,用户只需根据接收到的数据帧的识别符,将对应的数据转移到发送缓冲寄存器,然后将此报文对象的编码写入命令请求寄存器启动发送即可,而发送由硬件完成。这里使用定时更新发送报文对象中的数据,发送数据由控制器自动完成,当收到一个数据帧时,可将具有相同识别符的数据帧发送出去。其发送程序代码如下:
CAN报文的接收与发送相同,由CAN控制器自动完成,接收程序只需从接收缓存器中读取所接收的数据,再进行相应处理。其方法与发送程序基本一致,这里不再赘述。
6 、关键技术设计分析
6.1 冗余设计
工业控制现场状况复杂,因外力所致的电缆接触故障率远远高于节点的故障率,一旦电缆发生故障,总线就会失去通信能力,并导致系统瘫痪,对工控系统的健壮性构成威胁。解决这一故障最简单、有效的办法是对故障率较高的物理介质进行冗余设计。即使用2条总线电缆、2个CAN总线收发器,但只用1个总线控制器。仲裁电路自动监测总线状态,并自适应选择正常的电缆完成通信任务。发生电缆故障时,设备自动报警,提醒工作人员进行检修。检修过程中,设备使用备用电缆继续工作。电缆冗余设计可实现与通常的CAN总线通讯系统代码级兼容。仲裁电路设置于总线控制器与2个总线收发器之间,监测CAN总线电缆状态,实现自适应切换和报警。设备向其他节点发送报文时,总线控制器向2条总线同时发送相同的报文;而接收报文时,仲裁电路在无电缆故障时,一直使用总线1(主总线)进行报文接收。如果总线2(从总线)出现故障,故障监测电路就向主控计算机发出中断信号报故障,同时处于正常状态的总线1仍承担正常通讯任务;如果总线1出现故障,故障监测电路在向主控计算机发出中断信号的同时,自动切换成总线2,以保证设备正常工作。总线切换动作只会出现在正在使用的电缆发生故障时,这样可提高通讯的稳定性,降低应答失败的几率。
6.2 接收数据时ID不滤波的实现
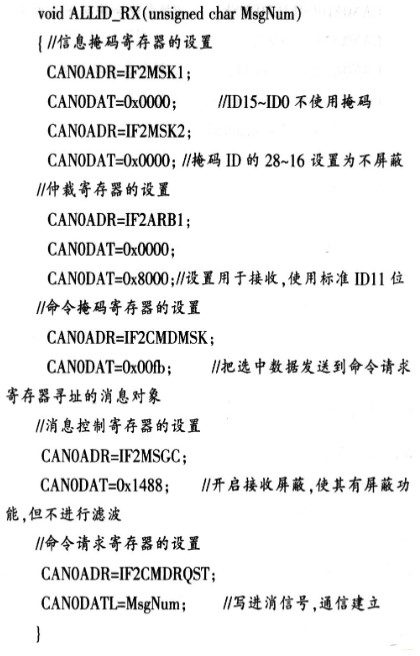
在CAN总线的接收过程中,一般实现的都是发送ID和接收ID相匹配的方式,也就是说在接收方要进行接收,而ID滤波,而本设计实现任意接收方式,只要有数据就开始接收不进行ID号的滤波,这样可更好进行测试,例如某个设备所携带的ID号,由于各种原因与接收方所接收的ID不匹配,这样就可判断出所发设备可能收到干扰,或者所发设备自身出现了问题。这种ID号不过滤的方法主要通过对接收设备的命令请求寄存器、消息掩码寄存器、仲裁寄存器、消息控制寄存器和命令掩码寄存器的设置来实现。其实现程序如下:
7 、结论
本文提出一种CAN总线隔离器的实现方案。利用具有CAN总线控制器的C8051F系列单片机实现了CAN智能节点,增加CAN节点的冗余设计,提高通讯的稳定性,降低应答失败的几率;实现不滤波的CAN数据接收,可更好测试系统的可靠性和监测功能,当接收到不是已知设备发来的消息时,能够准确定位设备故障的位置。此方案实现的CAN总线隔离器已成功应用于某型号飞行器的地面测试台中,经测试和调试后,系统工作稳定,达到设计要求。并且由于采用内嵌的CAN 总线控制器,可为以后的系统升级预留大量空间。
-
C8051F单片机的IAP系统设计与实现2011-03-04 3536
-
C8051F系列单片机2013-09-27 3343
-
c8051f单片机中文资料下载2008-07-19 1468
-
基于C8051F的CRC校验算法的实现2009-03-14 1247
-
基于C8051F的数据传输系统设计与实现2009-09-21 924
-
C8051F单片机2010-04-06 918
-
C8051F单片机串口IAP原理2010-07-13 838
-
C8051F单片机介绍2011-02-24 1324
-
C8051F系列单片机PCB封装图库(Silicon Libpcb.ddb)2011-04-16 3337
-
C8051F单片机的IAP系统设计2011-06-13 1299
-
C8051F单片机IAP原理2011-06-14 1409
-
《C8051F系列单片机开发与C语言编程》PDF书籍+光盘程序2016-04-28 3603
-
C8051F单片机产品概览2016-05-06 1070
-
C8051F系列单片机实验指导书2016-12-16 1013
-
单片机 C8051F便携直流高压发生器的研制2021-09-17 1201
全部0条评论

快来发表一下你的评论吧 !
