

采用PWM控制技术实现对舰炮随动系统进行数字化改进
描述
目前我海军舰炮的随动系统仍沿用早期的机电式设备,它的主要缺点是跟踪定位误差大、机动能力差、快速突防能力不强、体积大、噪声大、价格昂贵,而且故障率高。这些问题直接影响到舰艇综合防御能力及生存能力的提高。为此,对该舰炮的随动系统利用计算机进行数字化改进是非常必要的。
1 某型舰炮随动系统构成
下面介绍的舰炮随动系统是一种基于输入角度与反馈角度之间有偏差的原理进行工作的。其构成如图1所示。
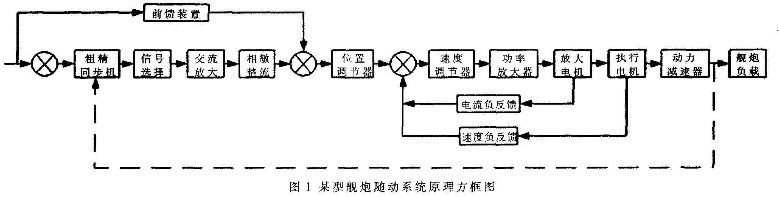
由指挥仪解算出的射击诸元,传送到随动系统受信仪,受信仪将指挥仪给出的目标未来位置与舰炮实际位置进行比较,得出误差电压uθ,uθ经过信号选择和交流放大后进入相敏整流器,解调出与uθ大小和方向有关的直流信号电压Uθ,经位置调节器校正后进入速度调节器,与速度反馈信号uf和电流反馈信号If相加,形成电机扩大机的控制信号,控制扩大电机端电压的大小和极性,从而控制执行电机的转速和转向。
与执行电机同轴转动的测速发电机产生速度反馈信号,经滤波网络送入速度调节器输入端,从电机扩大机补偿绕组上取出的电流反馈信号,也送入速度调节器的输入端,与主令信号叠加,使从位置调节器之后的所有部分共同组成一个性能优良的调速系统。在位置调节器中采用了PI调节器和降阶电路,并可以根据误差的大小自动切换位置调节器工作于PI调节状态或P调节状态。另外,系统还从指挥仪引入了一个与目标运行速度成正比的信号,即前馈信号,经过RC网络微分,加到位置调节器上以补偿由于加速度造成的误差。
该随动系统主要存在以下不足:
(1)功率驱动大环节采用的是最原始的交磁电机扩大机,需要电动机提供驱动动力,使用维护复杂,在日常的部队训练与装备维修时极不适用;
(2)交磁电机扩大机是一个惯性环节,影响系统的实时快速处理能力,动态响应较慢;
(3)体积大、噪声大、效率低;
(4)外围电路复杂,可靠性较低。
针对上述不足,为方便部队使用和维护,以DSP为核心,采用最新的PWM控制技术对该随动系统进行了数字化改进,主要目的是以数字式电机驱动放大电路替换交磁电机扩大机。
2 随动系统数字化改进
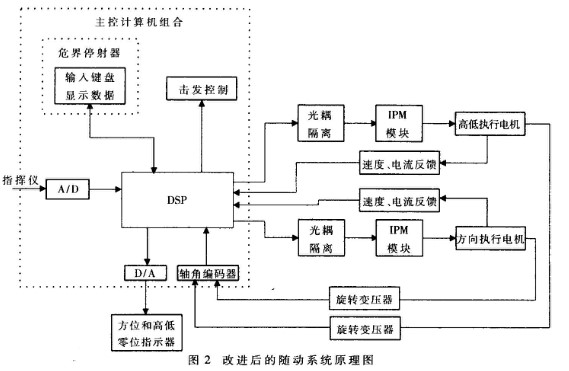
改进后的系统如图2所示,主要由主控计算机组合、驱动执行电机的IPM模块、方位和高低位置反馈、方位和高低执行电机、方位和高低零位指示器、速度及电流反馈电路、击发控制电路等组成。
2.1基本原理
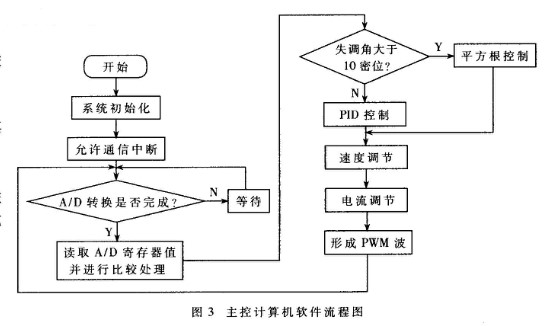
主控计算机将指挥仪传来的目标未来点位置信号和舰炮当前位置信号相比较,进行变结构控制,输出给定速度信号。即采用非线性的平方根控制与线性的PID控制相结合的方式。
当系统存在大偏差时(取00“10),采用平方根控制以保证系统快速性,其控制算法为:
将给定速度信号与速度反馈信号相比较,经PI调节后输出给定电流信号。
将给定电流信号与电流反馈信号相比较,经PI调节后输出所需要的PWM控制信号波,再通过高速光耦隔离输出到IPM的相应控制端子。
由此可以按照控制要求驱动IPM进行工作,从而驱动执行电机带动舰炮跟踪目标。
2.2 主控计算机组合工作过程
主控计算机组合是以TMS320F2407为核心,具备多路PWM输出、电流检测、编码器接口、通信接口、模入模出、数字I/O以及各种故障诊断报警功能等接口的全数字模块。其解算流程如图3所示。
2.3 功率放大电路工作原理
改进后的功率放大电路采用双H桥形式来代替原系统中的交磁电机扩大机分别驱动两个执行电机,如图4所示。H桥中的开关器件V1、V2、V3、V4采用智能功率模块(IPM),本系统采用模块型号为PM200DSA06。
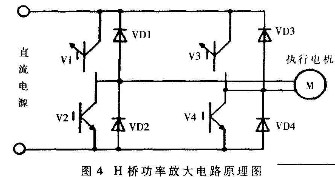
直流电源由三相交流电经可控硅整流后得到,输出端接执行电机,在每个IPM模块控制端输入设定的控制脉冲即可。为了防止强电部分(IPM)和弱电部分(控制信号PWM波)之间的相互干扰,这里采用高速光耦完成电气隔离,如图2所示。另外IPM模块还具有故障输出端,故障输出端通过光耦与主控计算机端相连,一旦模块有故障,主控计算机马上申请高优先级中断,停止控制信号的输出,使IPM停止工作。
2.4反馈电路设计
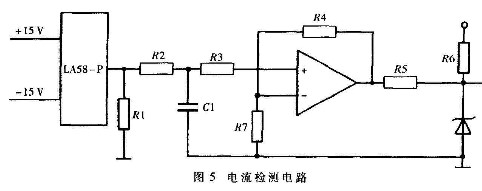
2.4.1电流检测电路
电流检测电路采用霍尔电流传感器LA58-P作为电流检测元件,检测电机的电枢电流。LA58-P的变比为1∶1 000,由于TMS320F2407要求的D输入信号为0~5 V模拟电压信号,因此,电流传感器输出的弱小电流信号首先经过采样电阻R1转变为电压信号,再经RC电路滤波后,通过运算放大器进行标度变换,变换为0~5 V的电压信号,送入DSP的A/D采集通道。电流检测电路如图5所示。
2.4.2 舰炮位置检测原理
位置检测元件在伺服系统中占有很重要的地位,它的检测精度直接关系到整个系统的运行精度,因此本随动系统采用绝对位置检测元件——多极旋转变压器检测角度,将系统输出角转换成模拟电压值,再通过轴编码器进行轴角编码,将舰炮位置信号转换成二进制码,送给主控计算机,以实现位置反馈。
3 改进前后性能对比
基于上述方案,改进后的随动系统在调转速度、调转时间和平稳跟踪速度等性能方面明显提高,过渡历程的振荡次数明显减少,采用智能功率模块取代交磁电机扩大机后,使数字随动系统的快速启动性能提高。随动系统改进前后的主要性能对比如表1和表2所示。
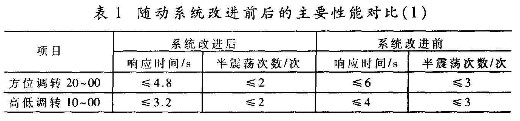
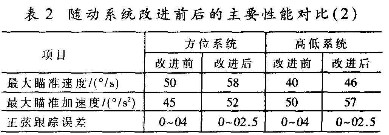
从上表可以看出,改进后的舰炮随动系统在方位和高低上最大瞄准速度各提高了16%和15%,响应时间和半震荡次数明显减少,正弦跟踪误差下降37.5%。
实验证明,改进的方法和技术实现过程是合理可行的。通过此种改进,有效提高了舰炮随动系统的战术技术性能,提升了武器装备的作战性能和信息化程度,降低了技术保障的难度,达到了改进的目的。综上所述,该改进方案主要优点在于:
(1) 此基于DSP的随动系统和原系统相比,具有更高的动态响应性能和控制精度。
(2)因不再需要发动机和交磁电机扩大机这些旋转设备,在部队日常维修训练时接岸电即可完成原来的功能,减小了运行噪声,改善了工作环境。
(3) 因主控计算机集成度很高,又采用了智能功率模块,使得装置的体积很小,仅为原电机扩大机体积的1/5,便于做成精巧的控制盒直接安装在电机壳上,在空间狭小的全封闭舰炮内很适用。
(4)这种基于DSP的数字随动系统同样可应用到其他舰炮中,对于实现我海军装备数字化非常有益。
-
高速数字化仪的技术原理和应用场景2024-10-21 4016
-
全数字化超声成像技术2010-01-21 5016
-
数字化测量系统的主要技术特性2018-01-25 4822
-
数字化和网络化传感器特点2019-06-25 3560
-
"新基建时代",中小企业该如何进行数字化转型2020-05-19 3601
-
数字化监控系统的特点及功能2020-12-11 3061
-
零售企业该如何进行数字化转型?2021-06-16 2714
-
基于ARM7和MX618实现无中心呼叫控制协议数字化系统设计2022-04-26 8959
-
IDH怎样助力工厂实现数字化与智能化之蜕变?数字化转型模式五段论2022-09-26 4136
-
数字化通用PWM控制器的设计2009-06-20 717
-
基于计算机的舰炮随动系统数字化改进研究2010-11-17 853
-
数字化高精度动调陀螺马达的电源设计2011-09-13 1152
-
基于单片机的电机随动系统的设计与实现2017-12-05 1081
-
基于PWM的数字随动系统设计2019-05-17 3615
-
企业改如何进行数字化转型升级?2021-03-17 4060
全部0条评论

快来发表一下你的评论吧 !
