

IMM滤波算法在机载警戒雷达的目标跟踪中的应用
描述
IMM(交互式多模型)方法是Blom H.A.P.于1984年提出的。多模型方法主要用于特性随时问变化系统的状态估计,所以它特别适用于机动目标的跟踪。一种典型的例子就是对进行机动飞行的飞机的跟踪。在IMM方法中,假定有有限多个目标模型存在,每个模型对应于不同机动输入水平。在计算出各模型为正确的后验概率之后,就可以通过对各模型正确的状态估计加权求和来给出最终的目标状态估计,加权因子为模型正确的后验概率。IMM估计器是已知最好的单次扫描状态估计器,被广泛应用于各个领域,但还没有应用在机载警戒雷达的目标跟踪中。本文选取某警戒雷达产品的某几条航迹用IMM方法进行滤波,把其滤波结果与目前实际工程中正在使用的.Kalman(Singer模型)滤波进行精度比较,实现模型的优选。
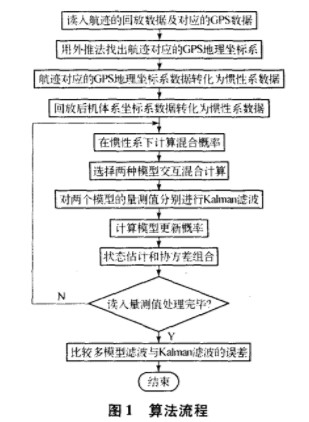
1 算法流程
本次仿真过程主要分为数据的读人、多模型滤波、数据的输出3个部分。数据的读入过程包括航迹同放后机体系数据读人、航迹对应的GPS数据的读入以及把读入的待处理数据进行坐标系的转换。多模型滤波过程即把上步中读入并转换成惯性系的数据分别在x、y、z轴进行多模型滤波。数据的输出过程包括把多模型滤波后的轨迹输出,并把此轨迹与实测的GPS(全球定位系统)轨迹以及用Kalman(Singer模型)滤波的轨迹进行比较,统计两者的误差大小。具体流程图见图l。
2 仿真输人数据
本仿真随机选取了某雷达实录的两条航迹,采用不同的模型组合对其进行滤波,分析对应于不同的机动性采用哪两种模型组合呵以最大限度地提高滤波的精度,并且以GPS测量数据为基准,把其滤波结果与目前常用的Kalman(Singer模型)滤波精度进行比较,得出有参考价值的结论。
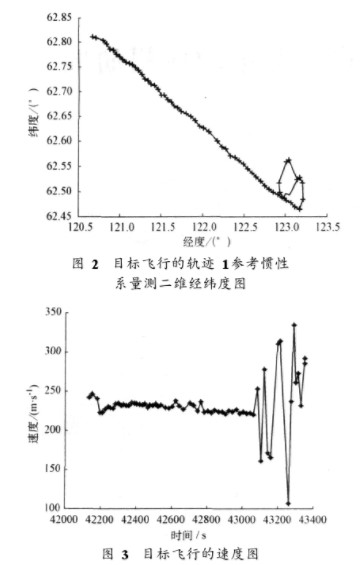
目标轨迹l大致为:在时间42 138 s目标从经度120.667。、纬度40.250°匀速飞行到经度123.172°、纬度62.465°,然后目标在时间43 065 s处360。大转弯,终点为经度123.118°、纬度62.521°。目标飞行的轨迹1参考惯性系量测二维经纬度图如图2所示,目标飞行的速度图如图3所示。
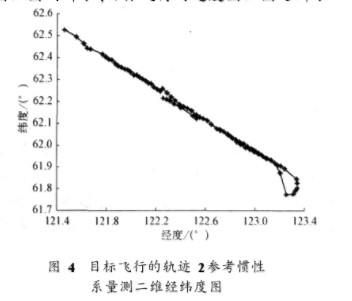
目标轨迹2大致为:在时间39 163 s目标在经度121.456°、纬度65.525°处匀速飞行到经度123.24l°、纬度61.89l°转弯机动飞行到经度l 22.25 l°、纬度62.215°。目标飞行的轨迹2参考惯性系量测二维经纬度图如图4所示,目标飞行的速度图如图5所示。
3仿真输出数据
3.1 航迹1
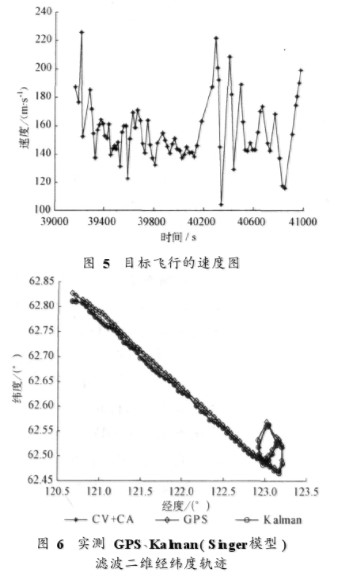
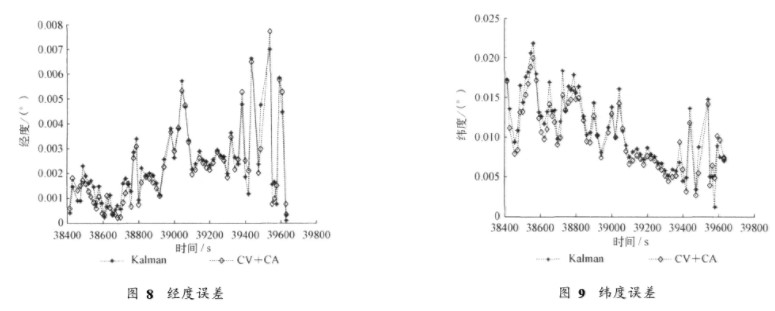
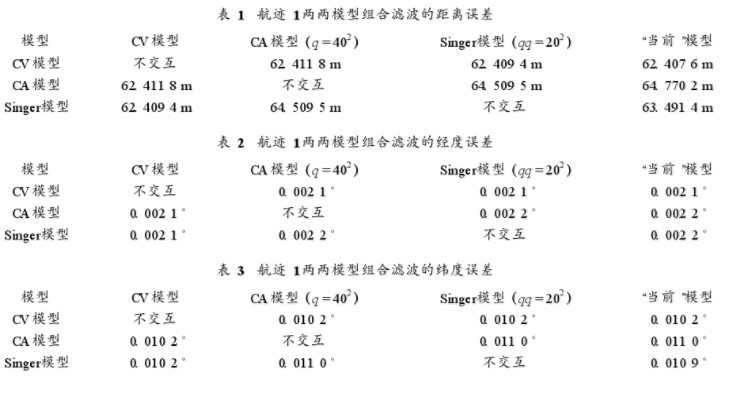
对航迹1分别采用CV模型与CA模型交互、CV模型与Singer‘模型交互、CV模型与“当前”统计模型交互、Singer’模型与“当前”统计模型交互,得到一组仿真图和一组仿真数据。其中CV模型和cA模型组合仿真结果如下:CV模型交互CA模型滤波、实测GPs、Kalman(Singer模型)滤波二维经纬度轨迹如图6所示,CV模型交互CA模型滤波和Kalman(Singer模型)滤波的距离误差如图7所示,经度误差如图8所示,纬度误差如图9所示。4种模型两两交互,共有6种有效模型组合。航迹1的6种模型组合滤波的距离误差统计如表l所示,经度误差统计如表2所示,距离误差统计如表3所示。航迹1用Kalman(Singer模型)滤波的距离误差为64.453 8 m,经度误差为0.002 2°,纬度误差为0.011 l°。
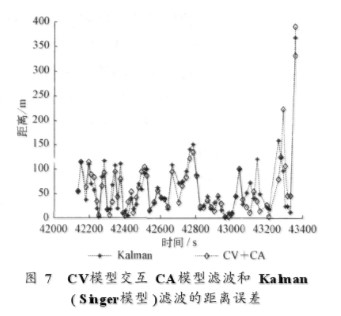
分析航迹l的仿真图表可以看出,CV模型与CA模型交互、CV模型与Singer模型交互、CV模型与“当前”统计模型交互滤波的距离误差达到62.4 m,距离误差比目前常用的Kalman(Singer模型)滤波的距离误差小2 m左右。cA模型与Singer模型交互、CA模型与“当前”统计模型交互的距离误差都比Kalman(Singer模型)滤波的距离误差大l m左右。Singer模型与“当前”统计模型交互距离误差比Kalman(Singer模型)滤波的距离误差小l m左右。经度和纬度的量纲很大,交互模型中包含CV模型的组合经度可以提高0.000 l°,纬度可以提高0.000 9°。Singer模型与“当前”统计模型交互的纬度提高O.000 2°,经度精度没有提高。由此可见,对于此条航迹,即目标作了927 s的匀速运动后转弯,CV模型与其余3种模型两两组合以及Singer模型与“当前”统计模型的组合都提高了滤波的精度,其中以cV模型和“当前”统计模型交互滤波提高的精度最高。
3.2 航迹2
对航迹2也可分别采用cV模型与CA模型交互、CV模型与Singer模型交互、CV模型与“当前”统计模型交互、Singer模型与“当前”统计模型交互,得到一组仿真图和一组仿真数据。其中,cA模型与“当前”统计模型组合仿真结果如下:cA模型交互“当前”统计模型滤波、实测GPS、Kalman(Singer模型)滤波二维经纬度轨迹如图10所示,CA模型交互“当前”统计模型滤波和Kalman(Singer模型)滤波的距离误差如图l l所示,经度误差如图12所示,纬度误差如图13所示。4种模型两两交互,共有6种有效模型组合。
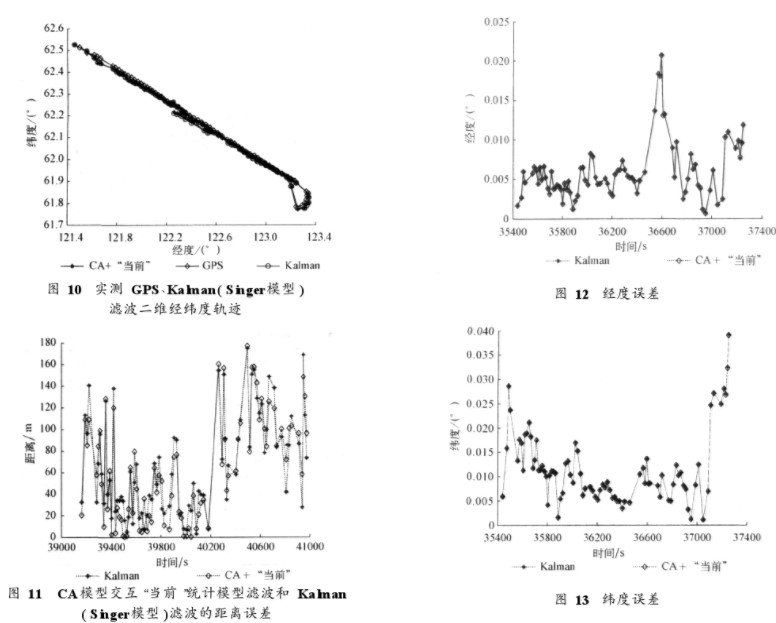
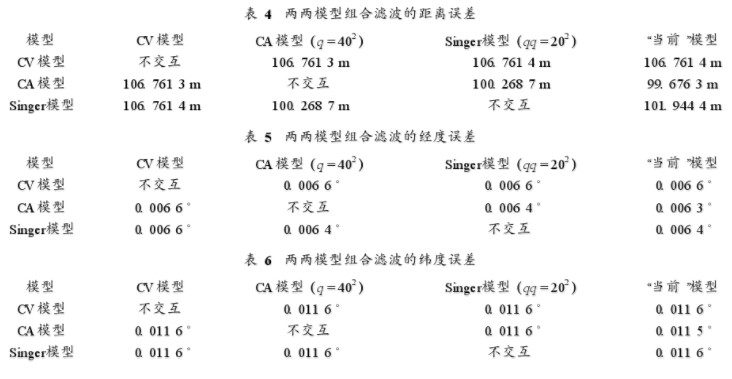
航迹2的6种模型组合滤波的距离误差统计如表4所示,经度误差统计如表5所示,距离误差统计如表6所示。航迹2用Kalman(Singer模型)滤波的距离误差为103.600 3 m,经度误差为0.006 4°,纬度误差为0.011 6°。
分析航迹2的仿真图表可以看出,cV模型与CA模型交互、CV模型与Singer模型交互、CV模型与“当前”统计模型交互滤波的距离误差达到106.7 m,距离误差比目前工程上使用的Kalman(Singer模型)滤波的距离误差大3 m左右。CA模型和Singer模型交互距离误差比Kalman(Singer模型)滤波的距离误差小3 m左右,CA模型与“当前”统计模型交互的距离误差比Kalman(Singer模型)滤波的距离误差小4 m左右。Singer模型与“当前”统计模型交互距离误差比Kal.
man(Singer模型)滤波的距离误差小2 m左右。经度和纬度的量纲很大,cA模型与“当前”统计模型交互的经度误差和纬度误差都减小了0.000 1°。由此可见,对于此条航迹,即目标做了约l 037 s的匀速运动后做了约800 s的机动,CA模型与Singer模型组合、cA模型与“当前”统计模型组合、Singer与“当前”统计模型组合都提高r滤波的精度。包含CA模型的组合提高的精度较为明显,其中以CA模型与“当前”统计‘模型交互滤波提高的精度最高。
4 结论
本文用cV模型、cA模型、Singel’模型以及“当前”统计模型两两交互的多模型算法来处理某警戒类雷达某天试飞的两条航迹,把其仿真得出的一系列结果与目前工程中用来处理航迹滤波的Kalman(Singer模型)算法进行比较,得出了如下结沦:
a)Kalman(Singer模型)跟踪简单、计算方便,实时性强,在目标跟踪滤波中具有一定的意义。
b)在飞机做非机动运动或者做小机动运动时,用Kalman(Singer模型)来处理航迹可以达到较好的效果,但精度要比包含CV模型交互算法的精度低。
c)在飞机作高机动时,用多模型滤波算法进行跟踪是有其优越性的,可以在一定程度上提高滤波的精度。
d)多模型算法提高滤波精度的前提是目标运动模型必须包含在多模型所设定的先验模型集中,并且其假设的自相关时问常数要与机动运动自相关时间常数接近,这样可以最大限度提高滤波的精度。
e)多模型算法中用Singer模型与“当前”统计模型交互的适用范围比较广。Singer模型实质是一种全局统计模型,而“当前”统计模型是一种即时统计模型。因此,对应于不同的机动情况,此两种模型组合的滤波精度一定会比单模型的滤波精度高,但其精度比目标运动模型包含在多模型所设定的先验模型集中滤波的精度低。
5 结束语
IMM滤波算法是自适应滤波算法,它的跟踪效果比较平稳,在目标发生机动时不会出现较大的误差。但多模型算法实质上是一种折中的算法,它通常需要对目标的机动特性做出合理的机动假设,选择正确的先验模型对此算法的滤波结果有比较大的影响。因此,模型的优选问题还需要进一步研究,把交互式多模型算法运用在实际工程中还需要一定的时间。
-
基于并行Boosting算法的雷达目标跟踪检测系统2021-06-30 1015
-
基于非线性滤波和多维标度的目标跟踪算法2021-03-17 1049
-
S波段雷达一般作为中距离的警戒雷达和跟踪雷达2020-06-24 18000
-
C3I仿真系统的警戒雷达功能2019-06-18 2459
-
基于多传感器的多模型机动目标跟踪算法设计2018-12-05 3204
-
基于QT+OpenCv的目标跟踪算法实现2018-09-21 5426
-
机载雷达目标跟踪能力评估2018-01-10 1218
-
认知雷达目标跟踪时的波形优化选择方法2017-12-21 1272
-
基于α-β滤波算法对船用雷达目标航迹定位2017-11-14 704
-
高超声速强机动目标改进IMM_CKF跟踪算法_戴邵武2017-03-19 814
-
QT+Opencv粒子滤波算法实现视频目标跟踪——(三)QT环境安装及配置2017-02-23 3409
-
机载脉冲多普勒雷达单目标跟踪系统仿真2016-08-24 701
-
非线性滤波算法在机动目标跟踪中的研究2010-07-08 832
-
粒子初始化方法在雷达目标跟踪中应用2009-06-16 445
全部0条评论

快来发表一下你的评论吧 !
