

浅谈基于H桥电路的控制电机的正反转和PWM调速
描述
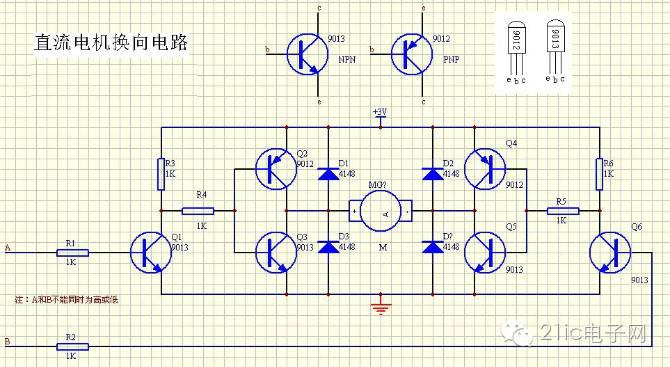
搭了个H桥电路,控制电机的正反转和PWM调速,程序是网上的,改改引脚就能用,电路和源程序如下:
功能:P1.1按键停止,P1.2左转,P1.3右转,P1.0调速
#include#define uchar unsigned char #define uint unsigned int sbit PW1=P0^0 ; sbit PW2=P0^1 ; //控制电机的两个输入 sbit accelerate=P1^0 ; //调速按键 sbit stop=P1^1 ; //停止按键 sbit left=P1^2 ; //左转按键 sbit right=P1^3 ; //右转按键 #define right_turn PW1=0;PW2=1 //顺时针转动 #define left_turn PW1=1;PW2=0 //逆向转动 #define end_turn PW1=1;PW2=1 //停转 uint t0=25000,t1=25000; //初始时占空比为50% uint a=25000; // 设置定时器装载初值 25ms 设定频率为20Hz uchar flag=1; //此标志用于选择不同的装载初值 uchar dflag; //左右转标志 uchar count; //用来标志速度档位 void keyscan(); //键盘扫描 void delay(uchar z); void time_init(); //定时器的初始化 void adjust_speed(); //通过 调整占空比来调整速度 //**********************************// void main() { time_init(); //定时器的初始化 while(1) { keyscan(); //不断扫描键盘程序,以便及时作出相应的响应 } } //*************************************// void timer0() interrupt 1 using 0 { if(flag) { flag=0; end_turn; a=t0; //t0的大小决定着低电平延续时间 TH0=(65536-a)/256; TL0=(65536-a)%256; //重装载初值 } else { flag=1; //这个标志起到交替输出高低电平的作用 if(dflag==0) { right_turn; //右转 } else { left_turn; //左转 } a=t1; //t1的大小决定着高电平延续时间 TH0=(65536-a)/256; TL0=(65536-a)%256; //重装载初值 } } void time_init() { TMOD=0x01; //工作方式寄存器 软件起动定时器 定时器功能 方式1 定时器0 TH0=(65536-a)/256; TL0=(65536-a)%256; //装载初值 ET0=1; //开启定时器中断使能 EA=1; // 开启总中断 TR0=0; } //****************************************// void delay(uchar z) //在12M下延时z毫秒 { uint x,y; for(x=z;x>0;x--) for(y=110;y>0;y--); } //******************************// void keyscan() { if(stop==0) { TR0=0; //关闭定时器0 即可停止转动 end_turn; } if(left==0) { TR0=1; dflag=1; //转向标志置位则左转 } if(right==0) { TR0=1; dflag=0; //转向标志复位则右转 } if(accelerate==0) { delay(5) ; //延时消抖 if(accelerate==0) { while(accelerate==0) ; //等待松手 count++; if(count==1) { t0=20000; t1=30000; //占空比为百分之60 } if(count==2) { t0=15000; t1=35000; //占空比为百分之70 } if(count==3) { t0=10000; t1=40000; //占空比为百分之80 } if(count==4) { t0=5000; t1=45000; //占空比为百分之90 } if(count==5) { count=0; } } } }
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
直流电机正反转控制电路的工作原理2023-03-27 20385
-
求助,H桥电路PWM控制电机转速时MOS管烧毁!2017-12-27 12615
-
PWM控制ULN2003怎么实现正反转2019-04-23 5262
-
PWM调速原理分享,如何实现电机的正转反转调速?2019-12-10 6767
-
Proteus仿真H桥控制电机正反转是怎样支持pwm调速的2021-06-28 1981
-
MS管搭建的H桥电路如何去实现电机的正反转控制2021-09-03 2860
-
PWM如何实现电机的正反转以及调速呢2021-09-23 5372
-
Proteus仿真H桥是怎样控制电机正反转的2021-10-14 2931
-
h桥电路控制电机正反转能用差分分电路代替吗?2023-04-25 1219
-
H桥式电机正反转换控制电路图2011-05-16 20962
-
2路直流电机驱动模块正反转PWM调速+双H桥步进电机迷你电机驱动2017-07-21 4998
-
pwm控制电机正反转,PWM直流电机调速程序2017-10-30 21381
-
用PMOS跟NMOS做H桥控制直流电机的正反转2022-11-11 10330
-
h桥驱动电路使电机正反转原理2024-10-06 8165
-
双通道H桥驱动并且每个H桥可提供4.0A电流的电流控制电机驱动器2025-09-03 1294
全部0条评论

快来发表一下你的评论吧 !
