

DS18B20数字温度计,DS18B20 Digital Thermometer
电子说
1.3w人已加入
描述
DS18B20数字温度计,DS18B20 Digital Thermometer
关键字:DS18B20数字温度计
1.DS18B20基本知识
DS18B20数字温度计是DALLAS公司生产的1-Wire,即单总线器件,具有线路简单,体积小的特点。因此用它来组成一个测温系统,具有线路简单,在一根通信线,可以挂很多这样的数字温度计,十分方便。
2、DS18B20产品的特点
(1).只要求一个端口即可实现通信。
(2).在DS18B20中的每个器件上都有独一无二的序列号。
(3).实际应用中不需要外部任何元器件即可实现测温。
(4).测量温度范围在-55。C到+125。C之间。
(5).数字温度计的分辨率用户可以从9位到12位选择。
(6).内部有温度上、下限告警设置。
3、DS18B20的引脚介绍
TO-92封装的DS18B20的引脚排列见图1,其引脚功能描述见表1。
4.DS18B20的使用方法
由于DS18B20采用的是1-Wire总线协议方式,即在一根数据线实现数据的双向传输,而对AT89S51单片机来说,硬件上并不支持单总线协议,因此,我们必须采用软件的方法来模拟单总线的协议时序来完成对DS18B20芯片的访问。
由于DS18B20是在一根I/O线上读写数据,因此,对读写的数据位有着严格的时序要求。DS18B20有严格的通信协议来保证各位数据传输的正确性和完整性。该协议定义了几种信号的时序:初始化时序、读时序、写时序。所有时序都是将主机作为主设备,单总线器件作为从设备。而每一次命令和数据的传输都是从主机主动启动写时序开始,如果要求单总线器件回送数据,在进行写命令后,主机需启动读时序完成数据接收。数据和命令的传输都是低位在先。
DS18B20的复位时序

DS18B20的读时序
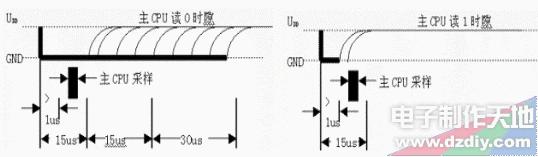
对于DS18B20的读时序分为读0时序和读1时序两个过程。
对于DS18B20的读时隙是从主机把单总线拉低之后,在15秒之内就得释放单总线,以让DS18B20把数据传输到单总线上。DS18B20在完成一个读时序过程,至少需要60us才能完成。
DS18B20的写时序
对于DS18B20的写时序仍然分为写0时序和写1时序两个过程。
对于DS18B20写0时序和写1时序的要求不同,当要写0时序时,单总线要被拉低至少60us,保证DS18B20能够在15us到45us之间能够正确地采样IO总线上的“0”电平,当要写1时序时,单总线被拉低之后,在15us之内就得释放单总线。
5.实验任务
用一片DS18B20构成测温系统,测量的温度精度达到0.1度,测量的温度的范围在-20度到+100度之间,用8位数码管显示出来。
6.电路原理图
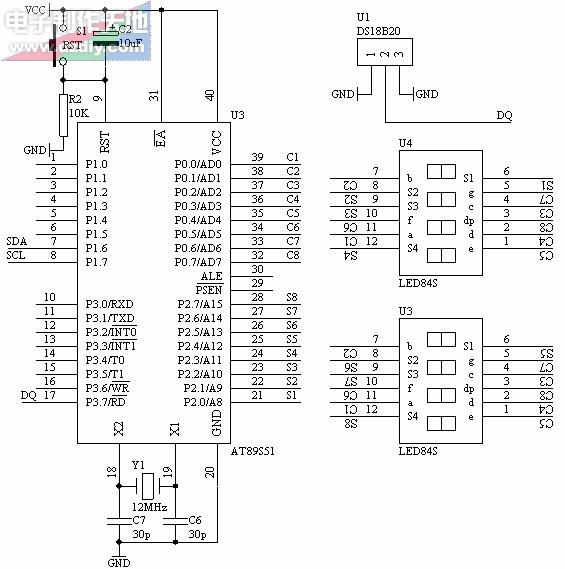
7.系统板上硬件连线
(1).把“单片机系统”区域中的P0.0-P0.7用8芯排线连接到“动态数码显示”区域中的ABCDEFGH端子上。
(2).把“单片机系统”区域中的P2.0-P2.7用8芯排线连接到“动态数码显示”区域中的S1S2S3S4S5S6S7S8端子上。
(3).把DS18B20芯片插入“四路单总线”区域中的任一个插座中,注意电源与地信号不要接反。
(4).把“四路单总线”区域中的对应的DQ端子连接到“单片机系统”区域中的P3.7/RD端子上。
8.C语言源程序
#include
#include
unsigned char code displaybit[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
unsigned char code displaycode[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,
0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00,0x40};
unsigned char code dotcode[32]={0,3,6,9,12,16,19,22,25,28,31,34,38,41,44,48,
50,53,56,59,63,66,69,72,75,78,81,84,88,91,94,97};
unsigned char displaycount;
unsigned char displaybuf[8]={16,16,16,16,16,16,16,16};
unsigned char timecount;
unsigned char readdata[8];
sbit DQ=P3^7;
bit sflag;
bit resetpulse(void)
{
unsigned char i;
DQ=0;
for(i=255;i>0;i--);
DQ=1;
for(i=60;i>0;i--);
return(DQ);
for(i=200;i>0;i--);
}
void writecommandtods18b20(unsigned char command)
{
unsigned char i;
unsigned char j;
for(i=0;i<8;i++)
{
if((command & 0x01)==0)
{
DQ=0;
for(j=35;j>0;j--);
DQ=1;
}
else
{
DQ=0;
for(j=2;j>0;j--);
DQ=1;
for(j=33;j>0;j--);
}
command=_cror_(command,1);
}
}
unsigned char readdatafromds18b20(void)
{
unsigned char i;
unsigned char j;
unsigned char temp;
temp=0;
for(i=0;i<8;i++)
{
temp=_cror_(temp,1);
DQ=0;
_nop_();
_nop_();
DQ=1;
for(j=10;j>0;j--);
if(DQ==1)
{
temp=temp | 0x80;
}
else
{
temp=temp | 0x00;
}
for(j=200;j>0;j--);
}
return(temp);
}
void main(void)
{
TMOD=0x01;
TH0=(65536-4000)/256;
TL0=(65536-4000)%6;
ET0=1;
EA=1;
while(resetpulse());
writecommandtods18b20(0xcc);
writecommandtods18b20(0x44);
TR0=1;
while(1)
{
;
}
}
void t0(void) interrupt 1 using 0
{
unsigned char x;
unsigned int result;
TH0=(65536-4000)/256;
TL0=(65536-4000)%6;
if(displaycount==2)
{
P0=displaycode[displaybuf[displaycount]] | 0x80;
}
else
{
P0=displaycode[displaybuf[displaycount]];
}
P2=displaybit[displaycount];
displaycount++;
if(displaycount==8)
{
displaycount=0;
}
timecount++;
if(timecount==150)
{
timecount=0;
while(resetpulse());
writecommandtods18b20(0xcc);
writecommandtods18b20(0xbe);
readdata[0]=readdatafromds18b20();
readdata[1]=readdatafromds18b20();
for(x=0;x<8;x++)
{
displaybuf[x]=16;
}
sflag=0;
if((readdata[1] & 0xf8)!=0x00)
{
sflag=1;
readdata[1]=~readdata[1];
readdata[0]=~readdata[0];
result=readdata[0]+1;
readdata[0]=result;
if(result>255)
{
readdata[1]++;
}
}
readdata[1]=readdata[1]<<4;
readdata[1]=readdata[1] & 0x70;
x=readdata[0];
x=x>>4;
x=x & 0x0f;
readdata[1]=readdata[1] | x;
x=2;
result=readdata[1];
while(result/10)
{
displaybuf[x]=result;
result=result/10;
x++;
}
displaybuf[x]=result;
if(sflag==1)
{
displaybuf[x+1]=17;
}
x=readdata[0] & 0x0f;
x=x<<1;
displaybuf[0]=(dotcode[x]);
displaybuf[1]=(dotcode[x])/10;
while(resetpulse());
writecommandtods18b20(0xcc);
writecommandtods18b20(0x44);
}
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
-
基于DS18B20数字温度计2014-04-12 0
-
ds18b20 pdf2008-03-06 1706
-
数字式温度计DS18B20的特性及应用2009-04-25 673
-
ds18b20电路图2010-03-03 5819
-
DS18B20 pdf,datasheet2010-04-26 895
-
DS18B20数字温度计使用2010-01-25 1638
-
基于DS18B20的数字温度计设计2015-12-21 724
-
51单片机与DS18B20的数字温度计2016-05-19 966
-
DS18B20数据手册免费下载2017-10-18 4750
-
ds18b20的特性_ds18b20温度传感器应用2020-04-24 11577
-
ds18b20数字温度计程序2022-03-11 846
-
DS18B20温度传感器的数字温度计设计案例2022-05-09 1613
-
DS18B20 数字温度计特点2023-09-11 3350
全部0条评论

快来发表一下你的评论吧 !
