

瑞芯微(EASY EAI)RV1126B ROS2安装
描述
1. 本文介绍
1.1 ROS2简介
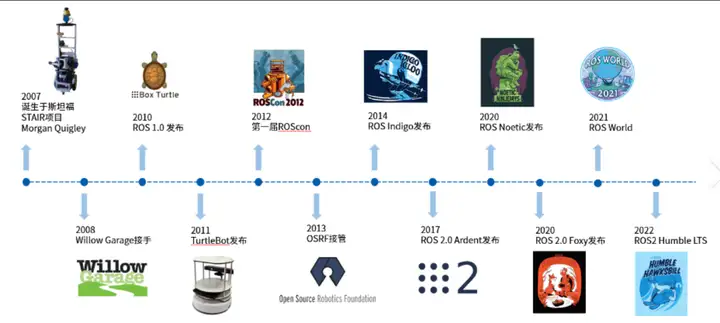
ROS是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。在某些方面ROS相当于一种“机器人框架(robot frameworks)”。
1.2 ROS2与ROS1的区别
ROS2作为ROS1的继任者,在保持ROS核心功能的基础上进行了诸多改进和优化。相较于ROS1,ROS2取消了ROS1中的Master 中央节点,实现了节点的分布式发现、发布/订阅、请求/响应通讯。ROS1使用自定义的中间件(roscore),而ROS2使用DDS中间件。ROS1使用catkin作为构建系统,而ROS2使用colcon作为构建系统
2. ROS2安装
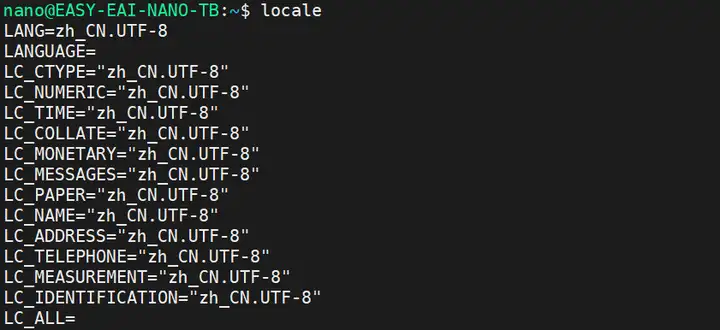
2.1 设置locale
# 安装locales
locale # check for UTF-8
sudo apt update && sudo apt install locales
# 配置locales
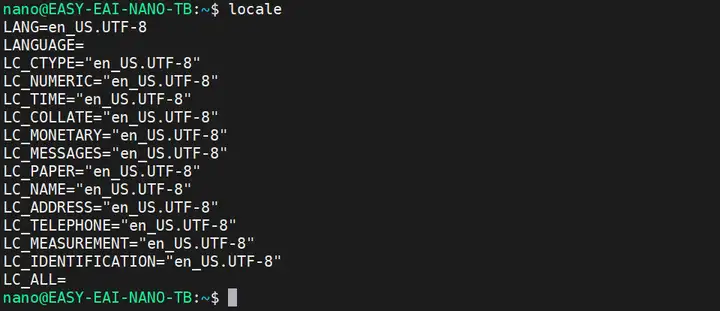
sudo locale-gen en_US en_US.UTF-8

sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8

locale # verify settings
2.2 设置源
sudo apt install software-properties-common
sudo add-apt-repository universe
# 安装curl库
sudo apt install curl -y
# 添加环境变量
export ROS_APT_SOURCE_VERSION=$(curl -s https://api.github.com/repos/ros-infrastructure/ros-apt-source/releases/latest | grep -F "tag_name" | awk -F'"' '{print $4}')
# 安装补丁包
curl -L -o /tmp/ros2-apt-source.deb "https://github.com/ros-infrastructure/ros-apt-source/releases/download/${ROS_APT_SOURCE_VERSION}/ros2-apt-source_${ROS_APT_SOURCE_VERSION}.$(. /etc/os-release && echo ${UBUNTU_CODENAME:-${VERSION_CODENAME}})_all.deb"

# 解包
sudo dpkg -i /tmp/ros2-apt-source.deb

2.3 安装
# 更新和升级新源的库
sudo apt update && sudo apt upgrade
两个版本:
(1)Desktop版(推荐):ROS, RViz, demos, tutorials
(2)Base版:Communication libraries, message packages, command line tools. No GUI tools
sudo apt install ros-humble-desktop
# 安装开发工具(可选)
sudo apt install ros-dev-tools
# 设置环境
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc source ~/.bashrc
3. 测试ROS2
3.1 远程控制桌面系统
安装桌面系统,详情请查看《应用笔记/安装桌面系统》
安装完毕后,在MobaXterm运行xfce桌面端:
startxfce4
3.2 ROS2测试
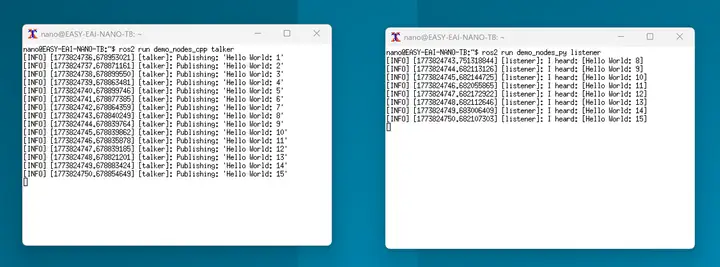
(1)发布和订阅测试:
打开一个终端,运行:
ros2 run demo_nodes_cpp talker
再打开一个新终端,运行:
ros2 run demo_nodes_py listener
(2)小海龟测试
接上8寸屏和鼠标键盘,启动终端运行:
ros2 run turtlesim turtlesim_node
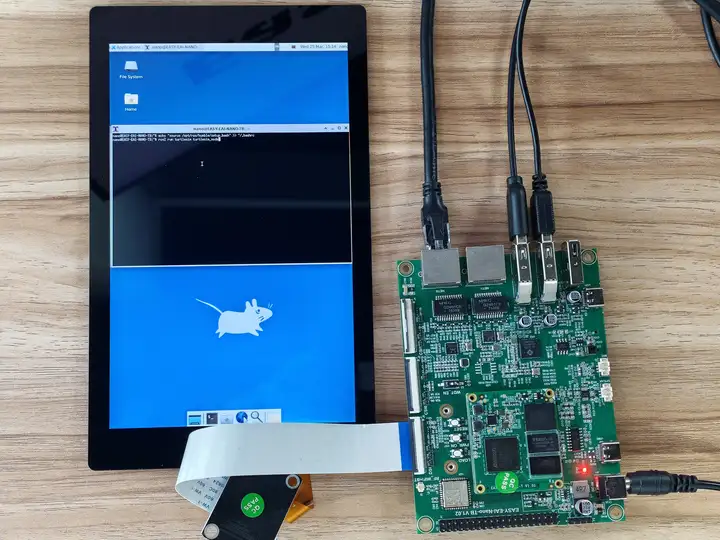
想用键盘控制小海龟旋转,新开一个终端,运行:
ros2 run turtlesim turtle_teleop_key
- 相关推荐
- 热点推荐
- 人工智能
- 开发板
- 瑞芯微
- EASY-EAI灵眸科技
- RV1126B
-
【EASY-EAI-PI2(RV1126B)开发板试用体验】开箱测试2026-06-13 209
-
瑞芯微RV1126B开发板(EASY-EAI-PI2) 音频输出2026-06-12 223
-
新品发布!新一代RV1126B开发套件EASY-EAI-PI2正式上线2026-06-08 809
-
瑞芯微RV1126B开发板(EASY-EAI-PI2) 主板简介2026-06-01 4319
-
瑞芯微(EASY EAI)RV1126B kernel2026-05-25 254
-
瑞芯微(EASY EAI)RV1126B ubuntu系统SDK源码获取2026-05-23 223
-
瑞芯微RV1126B 方案特性2026-05-11 2458
-
瑞芯微(EASY EAI)RV1126B yolov11训练部署教程2026-05-09 1026
-
瑞芯微(EASY EAI)RV1126B rknn-toolkit-lite2使用方法2026-04-22 1201
-
瑞芯微(EASY EAI)RV1126B 音频输出2026-04-01 8813
-
【EASY EAI Nano-TB(RV1126B)开发板试用】介绍、系统安装2025-12-23 1119
-
瑞芯微(EASY EAI)RV1126B 音频输入2025-12-18 2780
-
瑞芯微RV1126B特性概述2025-10-09 2512
-
【免费试用】EASY EAI Nano-TB(RV1126B)开发套件评测2025-09-23 1461
全部0条评论

快来发表一下你的评论吧 !
