

简要介绍高级辅助驾驶系统ADAS的专利技术
电子说
描述
自动驾驶是指依靠汽车上的安装的各种传感设备,例如摄像头、激光雷达、毫米波雷达、超声波雷达、红外雷达以及各种速度、角度传感器收集感测汽车本身及周围的环境信息,同时可能还会借助人工智能、计算机图像技术、全球定位系统和/或云端服务技术,让车辆在没有任何驾驶员的操作下自动安全地驾驶,实现转向、加减油门和刹车等。
自动驾驶技术背景
根据国际汽车工程师协会对自动驾驶汽车的分级,大概可以分为五级:
L1:驾驶辅助,针对方向盘和加减速中一项操作提供驾驶辅助,其他由驾驶者操作;
L2:部分自动化,针对方向盘和加减速中多项操作提供驾驶支援,其他由驾驶者操作;
L3:有条件自动化,可以完成所有驾驶操作,根据系统请求,驾驶员提供适当操作;
L4:高度自动化,可由无人驾驶系统完成所有驾驶操作,部分需要驾驶员决策;
L5:完全自动化,无需驾驶员任何操作,全靠无人驾驶操作,必要时可切换至人工模式。
目前多数自动驾驶车均处于L2级,部分可达到L3。除了传统的汽车制造厂商,一些互联网公司,如google, 百度等也纷纷投入重金进行自动驾驶技术的研发和生产。现在很多车辆已经具备了高级辅助驾驶系统ADAS、自动巡航ACC等功能,可以在一定程度上辅助驾驶员。在新闻中,大家经常可以看到GOOGLE, UBER, 百度无人车上路测试,也有出现故障甚至事故的情形。目前看来,自动驾驶距离完全抛去方向盘、油门、刹车等操作装置实现完全自动化的一天还有很长的路要走。
本文就以高级辅助驾驶系统ADAS为例,简要介绍其中涉及的专利技术,在此之前我们还是对自动驾驶技术相关的专利进行总体分析。
自动驾驶专利申请情况
自动驾驶技术大概是在2009年左右提出概念,也许还有少部分相关专利是在2010年之前就申请了,但本文首先对2010年以来大量申请的跟自动驾驶技术相关的专利申请进行一个粗略的检索和统计分析,检索仅对在专利申请的发明名称及摘要中显性出现自动驾驶中英文关键词及其近义词进行了限定,检索结果还比较粗糙,仅作为一个参考。
经过统计分析,自动驾驶领域的专利申请总体态势如下:
申请趋势
根据自动驾驶技术相关的专利历年申请趋势来看,自2010年至今相关技术的专利申请一直处于持续增加的态势,企业创新热情持续保持高涨。由于专利公开最晚可以自申请日之后18个月才公开,故部分专利可能实际已申请但现在通过公开途径无法检索到,从上图反映出来,2017年以来的专利申请快速回落,这可能跟实际情况有所偏差。
专利申请地域分布
从专利申请数量上来看,中国是目前自动驾驶专利申请最多的国家,有2688件;接下来申请量排名第2-4位的是传统的汽车大国德国、美国和日本,分别有2060,1371和1072件相关申请;然后,PCT申请和EP申请也有诸多企业布局专利,分别有1015,711件申请;韩国也有707件申请;另外,法国、英国、印度和墨西哥是其它布局相对较多的国家,分别有202,145,49和43件相关申请。
申请人排名
从申请人排名来看,传统汽车厂商,尤其是德系、日系和美系汽车公司牢牢占据了自动驾驶技术的专利申请TOP20,丰田、博世、福特公司则是包揽了前三名。而中国汽车厂商吉利、奇瑞、北汽、上汽、广汽等公司有少量布局,互联网公司谷歌、百度、优步、法拉第未来等公司也有所专利布局。
分类号
IPC分类号从一定程度上体现了相关专利技术的分布情况,本文前文限定了检索时使用的主要IPC分类号B60W和B60R,此处统计显示的更下位的技术分类以及同时分类到其他分类号的情形。请注意,上述统计对于一件专利分到多个分类号的情形采取的统计方法是重复统计来进行计算的。
ADAS技术专利浅析
ADAS技术算是自动驾驶应用最为广泛的一个技术。具体而言,ADAS技术包括:停车辅助、车道辅助、司机检测、超车变道/并线、自动避让、导航线路预测等。实际的专利布局情况是否是这样呢?我们通过Patentics的地图分析功能以自动驾驶相关的中英文关键词作为简单输入得到下图分析结果。
由下图可见,自动驾驶技术领域的专利申请主要分布在:本车行驶状态监测、外部车辆监测、车道行驶辅助、车距保持、变道超车、自动泊车、驾驶员状态监控等。上述专利申请分布情况与实际的ADAS技术应用情况还是存在高度重合性。下面以车道行驶辅助、变道超车、自动泊车为例对ADAS技术相关专利进行简要介绍。
车道行驶辅助
以车道行驶辅助为例,其可以包括本车道驾驶辅助和变道辅助,本车道驾驶辅助又可以分为车道保持LKA和偏移警示LDW技术等,而变道辅助又可以分为自动转向辅助和盲点监测辅助等。下面将就这些技术的相关专利进行部分展示。
在车道保持模式下,车辆控制转向和车速,以尽可能保持在同一车道中。在换道模式或车道保持模式下,驾驶员可通过施加制动或者恢复对于方向盘的控制而撤销自主式车道控制系统的控制。下面左图为本申请车道保持代表附图,右图为本申请换道行驶代表附图。
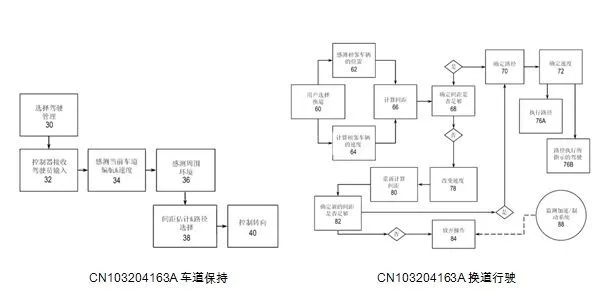
CN105059287A,申请人奇瑞,获取车辆到两条车道边线的距离;计算增强信号;根据获取的所述车辆到两条车道边线的距离和所述增强信号,采用预设的强化学习算法确定调节策略;按照所述调节策略,调节所述车辆的行驶轨迹。本发明的车道保持方法可以适用于各种路况,工作状体稳定,而且车辆再次遇到相同条件时,可以依据存储的调节策略来调节车辆的行驶轨迹,使得车辆能更加迅速地行驶至车道中线,进而减少调节次数,提高调节效率。
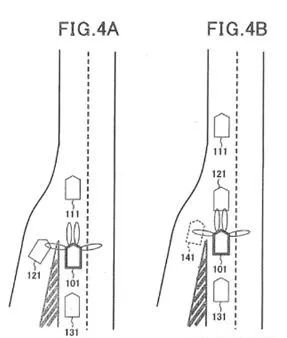
CN103748622A,申请人丰田,提供一种驾驶辅助装置,具备:死角识别部,其识别本车辆的行进方向上的对驾驶员而言的死角;移动体信息设定部,其设定至少包含有可能从死角突然出现的移动体的估计速度的移动体信息,作为与移动体相关的信息;速度区域运算部,其基于由移动体信息设定部设定的移动体信息,来运算在沿行进方向前进的情况下本车辆有可能与移动体接触的本车辆的速度区域;以及目标速度运算部,其基于速度区域来运算本车辆的目标速度。
变道超车
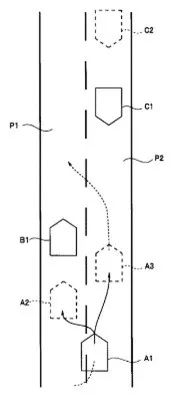
CN105216794A,申请人富士重工业株式会社,本车辆(A1)为了超越前行车辆(B1)而移动到跨越行驶车道(P1)与对向车道(P2)之间的边界部分的(A1)位置,在对向车道(P2)检测到对向车辆(C1)的情况下,暂时中断超车控制。并且,在确认了对向车辆(C1)偏离的情况下,解除超车控制的中断而执行超车,在对向车辆(C1)未偏离的情况下或虽然判定为对向车辆偏离,但是检测到后续车辆的情况下,维持超车控制的中断并返回到原来的行驶车道(P1)的前行车辆(B1)的后方。
WO2015096878A1,申请人沃尔沃, 涉及一种用于第一车辆的驾驶员的辅助方法,该方法包括步骤 : 使用所述设置在第一车辆上的检测装置来监控所述第一车辆周围的预定区域;识别所述第一车辆前方的道路状况和所述预定区域内的道路状况,该道路状况满足预定的风险标准;识别开始动作以对第一车辆进行超车的第二车辆;以及判定所述第一车辆和/或第二车辆在该超车动作期间的碰撞风险水平。
自动泊车
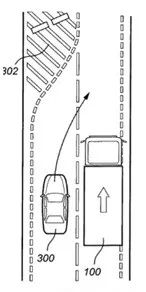
CN102016635A,申请人博世,涉及一种用于在使用至少一个第一传感器系统(2)和至少一个第二传感器系统(3)的情况下使机动车(1)运动、尤其是避免碰撞的驾驶员辅助方法,在障碍(31)处于第一检测区域中期间,该第一传感器系统在该第一检测区域中为机动车的驾驶员提供用于障碍信息的第一障碍信息,当该障碍不再处于相对于该第一检测区域呈大于0°的角度的第二检测区域中时,该第二传感器系统也在该第二检测区域中提供第二障碍信息。
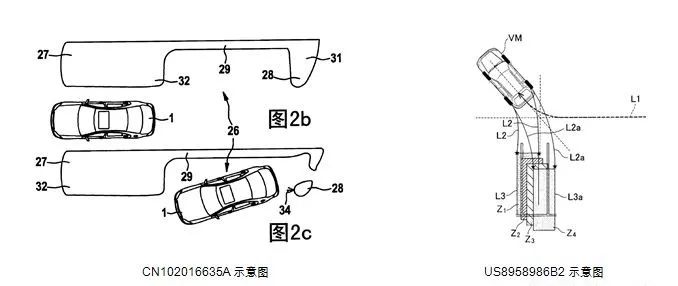
US8958986B2,申请人丰田,一种泊车辅助装置,其包括显示本车后方的场景图像的显示单元。至少当本车向前移动时或者当本车停止时,显示单元以使得将包括多个轨迹的指示叠加在本车后方的场景图像上的方式来显示指示,其中,本车能够依据这多个轨迹来从本车当前所处的地点倒退。
结论
总体而言,得益于传感器和AI技术的日益成熟,自动驾驶经过近十年的发展,技术也已经逐渐成熟并运用在市面销售上的整车上,对于驾驶员的行车辅助作用正在发挥越来越积极的作用。尤其是传统的整车厂商对于自动驾驶技术的布局也非常重视,从专利申请量来看,日、德和美三国的整车厂商进行了大量的专利布局,从他们布局的技术方向来看也是在自动驾驶技术中应用最广的ADAS技术进行了大量布局。另外,除了传统汽车厂商外,互联网公司也开始在自动驾驶技术上进行积极的专利布局。相较之下,中国申请人在自动驾驶技术的专利布局还相对较少,但是在中国市场上却具有最多的自动驾驶技术专利申请,对于中国本土厂商而言应注意识别并规避其中的侵权风险。
-
全面解析高级驾驶辅助系统ADAS2014-11-03 2707
-
高级驾驶员辅助系统(ADAS)关键技术应用与方案集锦2014-11-07 14500
-
什么是高级驾驶辅助系统:ADAS 概述2023-07-25 2598
-
高级辅助驾驶ADAS技术2019-04-03 2612
-
求大佬分享一个MAX9286+MAX96705高级辅助驾驶系统ADAS方案2021-10-11 2066
-
ADAS技术介绍2022-11-08 1008
-
高级驾驶员辅助系统(ADAS)解决方案2022-11-14 1478
-
高级驾驶员辅助系统(ADAS)2011-09-13 2102
-
你了解ADAS汽车高级辅助驾驶系统吗?2016-12-29 1335
-
一文看懂高级驾驶辅助系统ADAS的功能2018-04-15 26302
-
高级驾驶员辅助系统(ADAS)的TDA2x SoC全景可视系统介绍2018-08-22 6070
-
拆解分析高级辅助驾驶系统(ADAS)系统2019-03-04 5368
-
高级辅助驾驶系统(ADAS)电磁干扰问题如何解决2021-09-27 2121
-
卡车高级驾驶辅助系统 (ADAS) 解决方案 -飞凌嵌入式2021-10-27 3795
-
ADAS高级驾驶辅助系统2024-12-20 2831
全部0条评论

快来发表一下你的评论吧 !
