

基于CORDIC的高速Sobel算法实现
电子说
描述
图像边缘检测是数字图像处理领域中的一项关键技术[1-3],广泛运用在军事、农业、工业、医学、航天等领域[4-6]。随着电子信息技术的快速发展,各大相关领域对图像边缘检测技术提出更高的要求,即:在保证精度的前提下,即时处理大规模数据。
文献[6]、[7]使用硬件并行技术和流水线技术,大幅增加了数据的吞吐量,但在计算Sobel的梯度值时速度较慢,限制了系统的整体处理速度[6-7]。文献[8]在文献[6]、[7]的基础上,解决了Sobel梯度值计算速度较慢的问题,使系统的整体处理速度提升[6-8],但该方法牺牲了精度,导致边缘检测的效果较差。
针对上述问题,本文采用优化的CORDIC算法,将Sobel梯度计算公式转换成数据的移位和相加的流水线操作,在保证运算精确度的前提下,大幅提高整体运算速度。
1 Sobel边缘检测算法
Sobel算子是一阶导数的边缘检测算子,具有2组3×3的矩阵。图像中的像素点分别和这两个矩阵做卷积后,即可得到图像的水平、垂直梯度。根据式(1)和式(2)得到图像梯度值后,将该值和预设的阈值进行比较,即可判断该点是不是图像的边缘部分。
图1(a)为待处理的图像数据,图1(b)、图1(c)为用于计算x和y方向梯度值的卷积表。
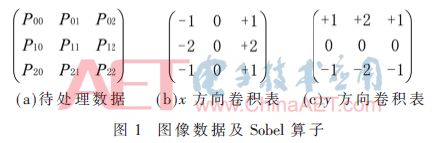
水平梯度Px、垂直梯度Py的计算公式如式(1)所示:

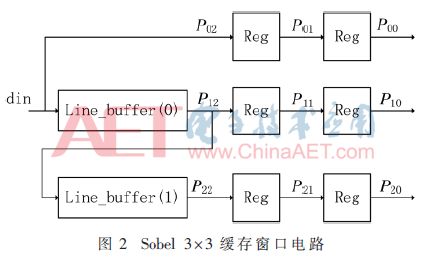
式(1)可以利用两个行缓冲器(Line_buffer)和流水线型的乘加器完成。如图2所示,当预存满两个行缓冲器后,再等2个时钟,系统即可实时地得到待处理的图像数据。
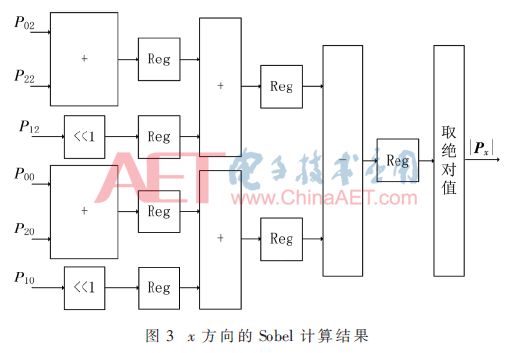
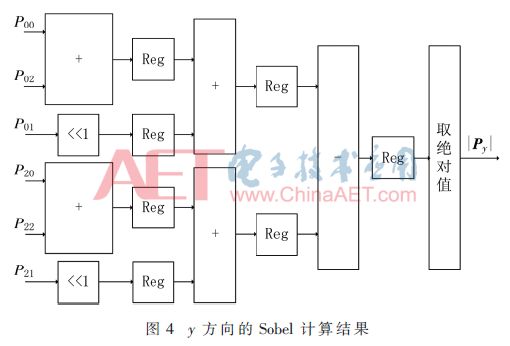
如图3所示,得到待处理的图像数据后,P02和P22直接进行加法运算,P12通过移位操作实现乘2效果。为降低D触发器(Reg)之间的逻辑时延,增加系统的工作频率,本文将P02和P22相加的结果、P12移位的结果寄存了一拍后,再进行加法运算。依据上述原理,对P02、P20和P10进行了类似操作。最后将两组数据做减法,再取一个绝对值即可得到x方向的Sobel计算结果。y方向的Sobel计算方法如图4所示,与图3的原理类似。
最终梯度值可以根据梯度计算公式算出:

依据式(2),即可得到最终梯度的模值|G|,将梯度的模值和阈值进行比较,就可以判断出该点是否为边缘点。关于梯度模值计算公式,文献[6]和文献[7]选择调用IP核实现平方根运算,该方法在一定程度上保证了计算精度,但是运算速度受限。文献[8]为解决这个问题,选择将式(2)等效为|G|=|Px|+|Py|,较好地提高了运算速度,但是运算精度大幅度降低。
为解决上述问题,本文选择用优化的流水线型的CORDIC算法,实现式(2)的运算。该方法既保证了精度,又提高了运算速度。
2 CORDIC算法原理
2.1 圆周系统下的CORDIC算法
为在保证运算精度的前提下,提高Sobel 算法的即时处理速度和数据吞吐量,本文选择使用CORDIC算法对其进行优化。CORDIC是将复杂的计算转换成移位和加法的迭代操作。CORDIC算法有旋转模式和向量模式。在不同的坐标系下使用,可以实现不同的功能。因需要实现式(2),本文选用圆周坐标系下的向量模式。
2.2 向量模式
向量模式下通过一系列的角度逼近,可以进行反正切和平方根的计算。旋转模式的完整迭代公式如式(3)所示。其中xi为当前的横坐标值,yi为当前的纵坐标值,zi为当前的角度累加值。其中yi控制着判决算子δi的值,yi的值为正时,δi为负;yi的值为负时,δi为正。
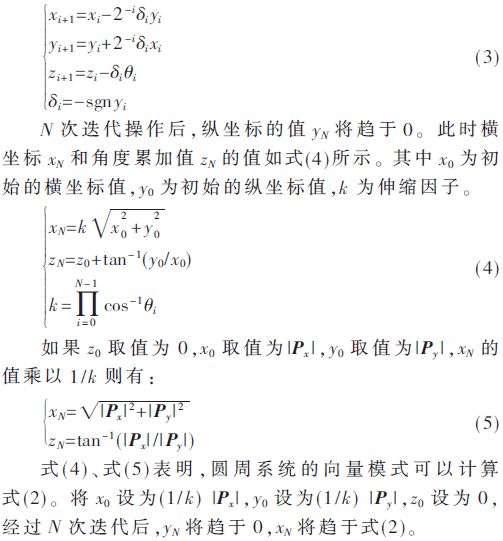
3 向量模式下CORDIC算法的优化
为提高系统的总体性能,本文对CORDIC算法进行了一定优化,最终提高了CORDIC算法的精度和速度。
3.1 覆盖角度的扩展
如式(6)所示,CORDIC算法的旋转角度有固定的规律,角度为2-i的反正切。当迭代次数趋于无穷时,所有角度值之和约等于99.827°。由此可知,覆盖角的度数为[-99.827°,99.827°],不能覆盖圆周上的所有角度。

考虑到只需求解式(2),输入数据的符号变化不影响最终计算结果。因此在式(1)处,直接求取了|Px|、|Py|,通过该操作将所有数据计算限制在了第一象限。为减少迭代次数,还可将输入数据进行进一步的处理。将|Px|和|Py|进行比较,如果|Py|大于|Px|,则将|Py|和|Px|的值互换;如果|Px|的值大于|Py|,则|Py|和|Px|的值保持不变。预处理后,数据的象限限制在[0°,45°]。因此可以减少一级迭代,收敛域也因此变为[-57.827°,54.827°]。经过上述处理后,式(5)变化成式(7)。

3.2 数据位扩展
CORDIC算法的迭代次数和运算数据的位宽对运算结果的精度有很大的影响。YU Y H在文献[9]中提出了解决量化误差(OQE)的方法。
YU Y H指出OQE由近似误差和舍入误差组成。近似误差是由有限个确定旋转角度量化CORDIC旋转角度带来的量化误差,由最大向量模值和迭代次数决定。舍入误差是因为计算时数据位不够带来的误差,由数据的位宽决定。
增加数据位宽和迭代的次数都可以提高运算结果的精度。但是,当迭代次数达到一定值后,迭代次数的增加对运算精度的影响变得很小。而增加运算数据的位宽将带来较好的效果,大幅度降低舍入误差。每增加一位数据位宽,舍入误差将变小1/2[9]。本文在用CORDIC算法实现式(2)时,在保证较大的迭代次数的前提下,将运算数据位扩展3位,大幅度降低了舍入误差。
在进行数据迭代运算时,考虑到采用浮点数可以降低工作频率,因此采用了定点数。如图5所示,定点数由符号位(S)、整数位(I)、小数位(D)构成。

3.3 优化后CORDIC算法的实现
圆周模式下的向量模式可以根据输入的|Px|和|Py|,直接求解出最终梯度的模值。梯度模值运算模块的硬件结构图如图6所示,由预处理、CORDIC迭代流水线、后级处理3部分组成。预处理部分中,将判断|Px|和|Py|的值是否需要互换。因为迭代次数已经提前确定,缩放因子已知,在预处理阶段的数值修正部分可以提前对最终结果进行补偿。补偿后,将数据位数从24位扩展成27位。扩展后,舍入误差将降低为之前的1/8,提高了运算的精确度。
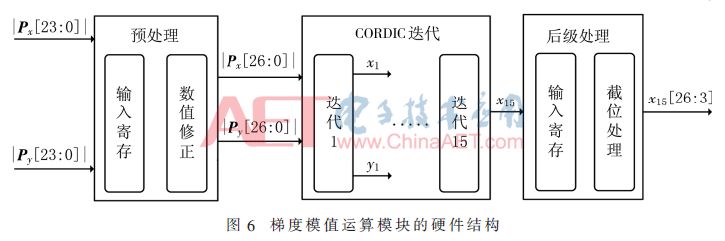
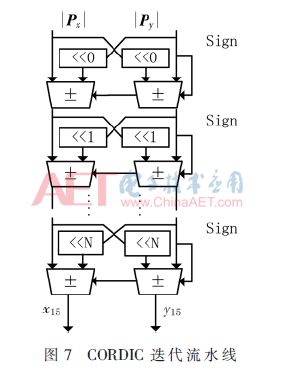
预处理后进入CORDIC迭代部分,迭代部分采用15级的流水线模式。根据式(3)可知,在求解式(2)时只需要知道|Px|和|Py|的值,因此可舍弃zi的计算,以此节约一些资源。如图7所示,迭代部分的每行存在两个移位寄存器和两个加/减法器。符号控制信号为Sign,由yi决定。通过式(3)可知,当yi为正时,xi处选用加法器,yi处选用减法器;当yi为负时,xi处选用减法器,yi处选用加法器。
数据通过迭代部分后,进入后级处理部分。后级处理部分将信号缓存一拍后,进行截位处理,然后就可得到x15[26:3]的值,即最终梯度的模值。此外,该设计采用了流水线结构,提高了吞吐量和最大工作频率。
4 系统仿真及性能分析
本设计在ISE14.7软件下,用Verilog HDL语言进行了实现。此外,使用MATLAB、Modelsim SE 10.1c进行了本设计的测试。
本文在Xilinx ISE编译器中编译好代码后,通过Modelsim进行了软件仿真。图8为本设计关键路径的仿真:CORDIC迭代运算的仿真。修正后的|Px|和|Py|采用定点数的方法进行表示,总计24位,0~12位为小数位,13~22位为整数位,23位为符号位。|Px[26:0]|和|Py[26:0]|为|Px|、|Py|扩展3位后的值,分别用x、y进行表示。Kn为最终梯度模值的计算结果。为了更直观地表示,输入值、中间值和输出结果均用有符号十进制数进行表示。根据仿真结果可知,采用优化后的CORDIC进行式(2)的运算,精确度约为10-4,远大于文献[8]的精确度。
仿真后,将文献[8]的算法和本文的算法进行了对比测试,结果如图9所示。通过图9(b)可以观察到,使用文献[8]的加速算法后,因为精确度较低的缘故,不能较好地检测到边缘,人像左下方、右上方处的头发边缘和背景混杂在了一起,人像面部左下方、右上方的边缘检测效果较差。使用本文的改进算法后,如图9(c)所示,在保证运算速度的前提下,较好地识别出了图像的边缘,较好地检测出了头发和面部的边缘,与图9(d)使用MATLAB实现Sobel算法的效果近似。
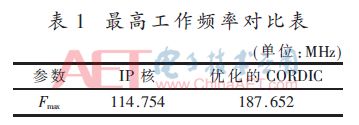
本文也尝试使用Xilinx ISE自带的平方根IP核实现关键路径的计算。选用Spartan6 XC6SLX16 2CSG324C芯片在Xilinx ISE14.7软件平台下,对平方根IP核进行编译综合。编译综合后,得到ISE计算出的最高工作频率信息。为测试本文使用算法的性能,在同样的条件下,对本文的算法也进行了编译,得到了最高工作频率信息。最终结果如表1所示。采用IP核进行关键路径的计算,最高工作频率为114.745 MHz。采用优化后的CORDIC算法进行关键路径的计算,最高频率为187.652 MHz。相比使用IP核的方法,采用优化后的CORDIC算法实现关键路径的计算可以提速63.53%。
5 结论
本文在传统Sobel加速算法的基础上,在FPGA平台上使用优化的CORDIC算法实现了Sobel算法加速。通过图9可知,该方法的边缘检测效果良好,较好地检测出了图像的边缘。通过表1可知,该方法与调用IP核相比提高了百分之63.53%的工作频率。实验结果表明,本设计进一步提高了系统的运算速度,适合在对速度有较高要求的系统中使用。
-
使用Verilog HDL设计实现Cordic算法2021-08-16 3575
-
怎么利用CORDIC算法在FPGA上实现高速自然对数变换器?2021-04-30 2956
-
如何使用FPGA实现CORDIC算法在跟踪环中的应用2021-01-22 1367
-
FPGA设计中必须掌握的Cordic算法2019-09-19 6435
-
基于FPGA的Cordic算法实现的设计与验证2018-07-03 3664
-
基于FPGA的边缘检测和Sobel算法2017-11-29 12672
-
高速低功耗CORDIC算法的研究与实现2017-11-16 1252
-
cordic算法verilog实现(简单版)2017-02-11 3708
-
CORDIC算法求助2015-07-11 4763
-
基于CORDIC算法的高速ODDFS电路设计2013-02-22 1461
-
基于改进的CORDIC算法的FFT复乘及其FPGA实现2011-07-11 4659
-
双模式CORDIC算法的FPGA实现2011-06-27 1345
-
基于CORDIC算法的载波同步锁相环设计2010-12-15 912
-
高性能HPOR CORDIC算法及实现2009-12-15 824
全部0条评论

快来发表一下你的评论吧 !
