

浅析光子雷达及其关键技术的发展趋势
电子说
描述
雷达是人类进行全天候目标探测与识别的主要手段,多功能、高精度、实时探测一直是雷达研究者追求的目标。这些特性实现的基础都是对宽带微波信号的高速操控,但受限于“电子瓶颈”,宽带信号的产生、控制和处理在传统电子学中极为复杂甚至无法完成。光子技术与生俱来的大带宽、低传输损耗、抗电磁干扰等特性,使其成为突破雷达带宽瓶颈和“照亮雷达未来”的关键使能技术。同时光子系统重量轻、体积小、可集成,可以将雷达系统的体积重量降低数十倍,从而大大减轻飞机、卫星、舰艇等的载荷。因此光子技术的引入有可能改变现有雷达系统的体制,赋予雷达系统更加蓬勃的生命力。本文总结了国内外光子雷达系统的主要研究进展,讨论了光子雷达系统中的关键技术,并展望了光子雷达及其关键技术的发展趋势。
未来的战争将是地、海、空、天一体化的多维空间立体战,不但有水下、水面、空中、地面硬杀伤兵器在有形空间展开的火力战,还有信息获取传感器与软杀伤兵器在无形空间展开的信息战。导弹等精确制导武器的大量使用改变了以往战争中的攻防结构,扩大了交战的空间,交战双方相距很远时,就可以用导弹相互实施攻击,先知先觉成为有效攻击和防御的首要任务。雷达作为现代战争中极为重要的军事装备,是海、陆、空、天各兵种的“眼睛”,是全天时、全天候、复杂环境下发现和跟踪各种威胁的重要手段,自诞生以来就被广泛研究[1-5]。然而,随着雷达技术的发展,对抗雷达的作战平台和作战方式也得到了长足的发展;同时,随着飞行器技术的发展,雷达所需探测的目标的特征和电磁特性也日益复杂,使得雷达技术和系统必须不断发展和演进才能有效发挥作用。当前,日趋复杂的战场环境要求雷达既能搜索远距离目标,又能发现近距离目标;既能探测中空、高空目标,又能指示低空目标;既能进行多目标搜索、跟踪,又能进行制导和导航;既能轻松识别强目标,又能有效探测到低、慢、快、小、隐等低可观测目标[4-5];此外,雷达在作战中还担负着战场环境感知(成像、气象观测)、警戒、电子反制、敌我识别等多种任务。
然而,传统雷达基本上属于单一功能设备,即某一特定雷达只能完成某一种或某一类特定任务,这不可避免会造成以下后果[6]:
1)雷达装备的品种繁多、结构复杂,给研制、生产、使用和维护带来极大不便,直接影响装备的通用化和标准化建设;2)作战中,大量数据从各个性能不同的雷达传感器送至控制计算机,在系统反应时间上形成薄弱环节,最终影响作战效能;
3)在舰船、飞机、卫星等具有有限装备空间、有限载重范围和有限能源供给的载体中,同时配置多部雷达将带来严重的电磁兼容性等问题,对载荷能力和续航能力提出巨大的挑战;
4)各雷达参数固定,在电子对抗中易被捕获和压制,生存能力较低。如果雷达的工作频率可以跨越多个波段,一方面雷达的参数在作战时不易被敌方获取,在电子对抗中具有较高的生存能力,另一方面可以在同一部雷达中同时实现或快速切换雷达的功能,使之拥有多种工作模式[7]。此外,大带宽本身对应着雷达的高分辨率。因此实现集多种功能于一体的新型雷达,研制和试验多波段宽带可重构雷达已成为重要的发展趋势。
要想实现多波段宽带可重构雷达,宽带射频前端是当前最为关键的挑战。然而受限于“电子瓶颈”,电子技术难以实现宽带信号的产生、控制和处理。微波光子技术的快速发展和不断成熟为多波段可重构雷达带来了希望。相比于传统电子技术,微波光子技术能够提供高频率、多波段的本振源和高精细、大带宽的任意波形产生,基于光真延时的波束形成可克服传统相控阵波束倾斜和孔径渡越等难题,微波光子模数变换在高采样率下仍能保持较高的有效比特数。此外,微波光子技术相对于电技术还具有传输损耗低、质量轻及抗电磁干扰等潜在优势[8-10],因此基于微波光子技术的雷达能有效克服传统电子器件的若干技术瓶颈,改善和提高传统雷达多项技术性能,甚至有望成为下一代雷达系统的关键,为雷达等电子装备技术与形态带来变革。
微波光子技术自诞生以来就受到了国际学术界、工业界和国防部门的高度重视,美国国防部高级研究计划局(DAR⁃PA)近年来设立了数十个项目支持核心微波光子器件、光电振荡器、光任意波形产生(OAWG)、光模数转换(ADC)、模拟光子信号处理、模拟光子前端、光电集成等技术的研究[11]。中国和欧盟也对微波光子技术进行了重点支持,相应的器件、模块、单元技术日趋成熟。随着微波光子技术的发展,将微波光子技术应用于多功能雷达系统已成为众多国家的重要研究课题。以欧盟为例[12],设立“全光数字雷达”(PHODIR)项目以设计和实现基于光子技术的全数字式雷达验证装置。该装置在发射机端实现了高频信号的光子学产生,同时在接收端对雷达回波信号进行了超高比特率的光子采样,发射和接收共享同一基准源,从而确保了收发相参。在PHODIR项目的基础上,设立“预工业化光子雷达设计”(PREPaRE)项目,进行微波光子雷达的预工业化设计,以期将PHODIR项目的光子雷达推向工业化。设立“用于宽带互联的集成光毫米波器件和功能”(IPHOBAC)项目,研究先进紧凑的光子源,包括高频谱纯度及稳定性的微波源,超宽带可调谐微波源和带集成天线的发射机。设立“用于下一代合成孔径雷达应用的光子前端”(GAIA)项目,发展用于未来合成孔径雷达的阵列天线所要求的光子技术,包括阵列天线的光信号分发,在发射和接收时采用集成光路对每个天线单元进行真时延控制,设计适用于大型可展开天线的光控波束形成。因此,微波光子雷达不仅被学术界认为是新型雷达的未来,也被工业界视作切实可行的解决方案。本文将回顾国内外微波光子雷达关键技术与系统集成的主要研究进展,并对微波光子雷达进一步发展进行展望。
1、微波光子雷达系统研究进展
目前国际上微波光子雷达主要有美国、欧盟、俄罗斯3条发展路径,中国也在不断跟踪研究中形成了鲜明的特色。
1.1 美国微波光子雷达研究进展
早在20世纪80年代末,美国DARPA就开始支持微波光子雷达相关的研究,并形成了图1中的发展规划。根据该规划,微波光子学在雷达系统中的应用将分3个阶段。图1(a)为传统微波雷达接收前端:雷达回波由天线阵列收集,随后放大、滤波,接着波束形成网络对来源于不同空间方向的信号进行选择,所得到的信号经传输网络送至中心处理站,变频后进入数字接收机做进一步处理。在这种雷达前端中,信号传输一般由同轴电缆完成,其传输损耗约为1 dB/m,长距离传输时需多级放大才能补偿信号衰减,而这必然引入大量的非线性和噪声,增加了能耗。因此,美国DARPA在第1阶段开展高线性模拟光链路的研究,如图1(b)所示,利用超低损耗的光纤(传输损耗仅有0.0002 dB/m)取代体积大、质量大、损耗大和易被电磁干扰的同轴电缆。这个阶段的典型成果为20世纪70年代末美国莫哈韦沙漠中的“深空网络”[13],它由分布在数十km内的多个大型蝶形天线组成,这些天线借助光纤传输1.42 GHz超稳参考信号,并利用相控阵原理等效成一个巨大的天线。
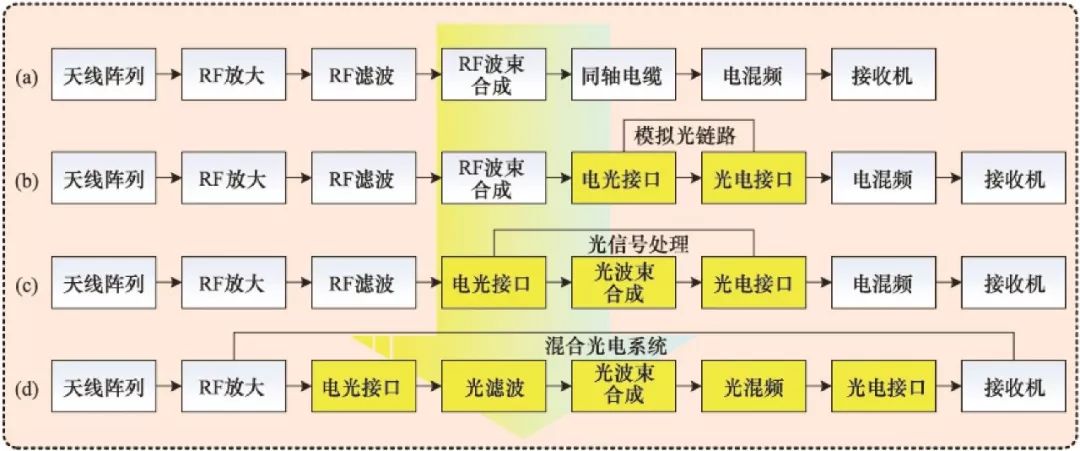
图1、DARPA 微波光子雷达发展规划Fig. 1 Development plan of microwave photonic radar of DARPA
美国DARPA微波光子雷达第2阶段的目标是实现光控(真延时)波束形成网络,用于替代在宽带情况下会出现波束倾斜、孔径渡越等问题的传统相移波束形成网络,如图1(c)所示。这个阶段的典型成果是1994 年美国休斯飞机公司(Hughes Aircraft)实现的基于光纤波束形成网络的宽带共形阵列[14]。在该阵列中,休斯飞机公司采用了电延时和光延时的混合模块实现对发射信号延时的控制,如图2所示,其中光延时模块采用的是最简单的基于光开关的延时模块。该相控阵系统实现了0.35~2.1 GHz范围内16阵元的±45°范围内1.31°的角度扫描精度,且在宽带宽角扫描时没有观测到波束倾斜效应。
图2、美国休斯飞机公司电光混合真延时模块示意Fig. 2 Hybrid electronic and optical true time delay module of Hughes Aircraft
进入21世纪后,随着光纤通信的蓬勃发展,光子技术越来越成熟,光电转换效率不断提升,微波光子技术也得到了飞速发展。因而,美国DARPA将微波光子雷达研究第3阶段目标定为微波光子信号处理的实现,期望研制出芯片化的微波光子雷达射频前端,如图1(d)所示。为此美国DARPA设立了诸多项目[11],包括“高线性光子射频前端技术”(PHORFRONT),“光子型射频收发”(P-STAR),“适于射频收发的光子技术”(TROPHY),“超宽带多功能光子收发组件”(UL⁃TRA-T/R),“光任意波形产生”(OAWG),“可重构的微波光子信号处理器”(PHASER)、“大瞬时带宽AD变换中的光子带宽压缩技术”(PHOBIAC),“模拟光信号处理”(AOSP),“高精度光子微波谐振器”(APROPOS)等。目前不少项目及其衍生项目还在执行中。尽管美国DARPA对微波光子学的研究投入了大量人力财力,大大推动了微波光子学的发展,但其更加重视微波光子学基础技术的攻关,而在微波光子雷达系统上的报道较少。
1.2 欧盟微波光子雷达研究进展
不同于美国,欧盟更加关注微波光子雷达系统的研究。世界十大防务集团之一——意大利芬梅卡尼卡集团认为微波光子雷达系统的发展要分4步走,如图3所示。第1步,采用光子技术辅助射频功能的完成,主要包括利用光纤进行射频信号的远距离传输等;第2步,采用光子完成复杂的射频功能,包括高频高稳高纯微波信号的光学产生,利用光子技术进行微波信号的移相滤波变频采样等处理;第3步,光子技术取代部分电技术在雷达系统中发挥作用,主要涉及光控波束形成在部分雷达系统中的应用;第4步,采用光子技术构建雷达系统,亦即实现全光的雷达收发样机。
图3、欧盟微波光子雷达发展规划Fig. 3 Development plan of microwave photonic radar of European Union
欧盟第1次在雷达系统中测试微波光子技术要追溯到1996年欧洲最大防务电子集团——泰勒斯(Thales)集团完成的光控相控阵样机[15],如图4(a)所示。不同于美国休斯飞机公司的光纤波束控制雷达系统,泰勒斯集团的光控相控阵系统采用了空间光延时模块对信号的延时进行控制。该系统工作于2.5~3.5 GHz,拥有16个阵元,可实现5 bit的延时控制和6 bit的相位控制。实验中完成了2.7~3.1 GHz范围内±20°的波束控制,无波束倾斜效应。此后泰勒斯集团还基于空间光延时实现了紧凑的真延时单元,并进行了外场测试,可实现6~18 GHz,扫描角度为±20°的无波束倾斜波束控制。该模块的照片和结果如图4(b)~(c)所示。
图4、泰勒斯集团的光控相控阵样机、真延时单元照片及外场测试结果
Fig. 4 Optically controlled phased array prototype of Thales, the photo of true time delay module, and the results of the field test
2013年,意大利国家光子网络实验室的Bogoni团队完成了1个结合微波光子多载波产生、发射和接收的光子雷达收发信机PHODIR(图5(a)),该工作于2014年3月在《Nature》
发表[16]。在发射端,具有超低抖动的锁模激光器产生1串光频梳输入到微波光子信号发生器中。在微波光子信号发生器中,光频梳信号被分成两路,分别经过2个光滤波器选出2根梳齿,其中1根梳齿调制上中频信号,另1根梳齿经过频移后与前1根梳齿合并拍频,实现雷达发射信号的产生。通过选择不同的梳齿可以产生400 MHz~40 GHz频率步进可调的雷达发射信号。在接收端,利用锁模激光器产生的光脉冲对接收到的雷达回波进行超快采样。采样后的信号经过光串并转换和时域拉伸进行降速,再进入低速电模数转换器中做进一步的量化和编码。该方案采用了锁模激光器为雷达发射机提供可重构波形,理论上可以产生上百GHz的微波信号,同时为接收机的光模数变换提供超低抖动的窄脉冲,避免了混频器的使用,提高了系统的稳定性和灵敏度,保证了收发相差。PHODIR雷达还进行了外场测试,得到了如图5(b)~(e)所示的结果。其中图5(b)为外场测试飞机的起飞轨道,图5(c)为A所在点的距离-速度图,图5(d)为距离和速度分辨率的放大图,图5(e)为未使用编码时的距离图,图5(f)为使用了13位巴克码编码的距离图。从实验结果可以看出,未使用编码前系统的距离分辨率为150 m,速度分辨率为2 km/h。编码后系统的距离分辨率提升至23 m。该系统的探测距离可达30 km。
图5、PHODIR 雷达及外场测试结果Fig. 5 Schematic diagram and the field test result of PHODIR
2015年,Bogoni研究组[17]对系统进行了改进,将PHODIR雷达拓展至双波段。系统核心是1个双波段射频发射机和1个双波段射频接收机,如图6所示。在发射端,锁模激光器产生的宽谱信号分成3路,分别通过3个光滤波器选出不同载波的光梳齿,其中第1路被调制上中频波形信号,后与第2路和第3 路合并拍频,拍频可以得到2 个载有信息的射频信号。分两路由2个射频前端进行选频放大,而后经过天线发射出去。在接收端,天线接收到的雷达回波经过选频放大等操作被重新调制回锁模激光器的1个梳齿上,与另外2根梳齿合并混频,从而将射频信号下变频到中频。所得到的中频信号输入电模数转换器和数字信号处理模块中进一步处理。该研究小组还对PHODIR双波段雷达进行了外场测试,首先对比了PHODIR 和商用X波段SEAEAGLE 雷达成像结果,如图7所示。图7(a)为光子雷达探测到港口图片,图7(b)、(c)分别是SEAEAGLE雷达和双波段微波光子雷达X频段分系统的平面位置指示器图像,二者符合极好,证明该双波段雷达样机已达到了商用先进雷达的性能。随后又同时发射S和X波段波形对港口的一艘轮船进行成像和测速,并利用发射的S和X波段波形内在的相参性将两波形进行数据融合,省去了数据融合时复杂的相位校准算法,最终等效成带宽为两信号带宽之和的信号。图8(a)为目标的图像,图8(b)、(c)分别为S、X波段探测到的一维距离像,图8(d)是利用融合算法合成的一维距离像。此时的探测精度相当于两信号带宽之和对应的探测精度,使得图中显示出了更多的细节。该小组还对更多的非合作目标进行了合成孔径成像,如图8(e)~(j)所示。图8(e)为空中非合作目标波音737,图8(h)为海上非合作目标轮船。图8(f)和(g)分别为S波段和X波段对图8(e)的成像结果,图8(i)和(j)分别为S波段和X波段对图8(h)的成像结果。该系统的最大优点在于通过同一个发射机和接收机同时实现了双波段信号的发射与接收,大大降低了系统对硬件的要求。此外,该系统在发射机和接收机中使用了同一个锁模激光器,保证了收发的相干性,有利于通过光混频方法将信号频率降到中频处理。然而,要实现对发射信号频率的灵活选择,要么需要多组特定频率的雷达射频前端,要么需要性能较好的可调谐电滤波器,这仍然是该系统的挑战之一。
图6、基于光子系统的双波段雷达发射机和接收机Fig. 6 Transmitter and receiver of the dual-band PHODIR
图7、PHODIR 与商用SEAEAGLE 成像对比Fig. 7 Imaging result comparison between the PHODIR and SEAEAGLE
(a)目标的图像;(b)S 波段探测到的一维距离像;(c)X 波段探测到的一维距离像;(d)利用上述融合算法合成的一维距离像;(e)空中非合作目标波音737;(h)海上非合作目标轮船;(f)和(g)分别为S 波段和X 波段对(e)的成像结果;(i)和(j)分别为S 波段和X 波段对(h)的成像结果
图8、PHODIR 双波段雷达外场测试结果Fig. 8 Field test results of the dual-band PHODIR
除了对全光多波段雷达样机的探索,Bogoni团队还研究了雷达/通信双用途原型机[18],基本框图如图9所示。系统中通过一个雷达发射机产生并发射中心频率为2.4 GHz、带宽为20 MHz的雷达信号测试动目标“汽车”的距离和速度,同时通过1个通信发射机发射4.9 GHz的64-QAM信号用于无线通信。两信号通过相互独立的天线发射,但被同一个开槽波导阵列双波段天线接收,输入到同一个射频接收机中进行处理。通过同时对两信号进行光下变频处理。一方面测得了汽车的行驶速度约为50 km/h,距离约为13.8 m,另一方面,在雷达信号存在的情况下,通信信号的误差矢量幅度并没有什么变化,说明两分系统之间不会互生干扰。与没有光电下变频,直接接收电信号对比,仅有光电电光转换引入的3 dB左右损耗。上述系统的实现,说明未来该原型机能够利用同一个光子收发信机和天线完成多波段、多制式信号的产生、发射、接收和检测,实现真正意义上软硬件共享的雷达/通信一体化系统。除此以外,该研究小组还研究了激光雷达和射频雷达的综合系统[19],利用同一个锁模激光器分别为激光雷达和射频雷达提供高稳定的光源,在节省硬件资源的同时,也使得两雷达系统可以互为补充,增加了雷达系统在作战环境中的鲁棒性。
图9、雷达/通信双用途原型机原理及测试结果
Fig. 9 Schematic diagram and the experimental results of the integrated radar and communication system
1.3 俄罗斯微波光子雷达研究进展
俄罗斯也一直在发展微波光子雷达技术,由于其主要论文均由俄文撰写,国际社会对其研究进展了解甚少,直至2014年俄罗斯最大的无线电子设备制造商无线电电子技术联合集团(KRET)公开宣布,受俄罗斯政府资助开展“射频光子相控阵”(ROFAR)项目研究。该项目旨在开发基于光子技术的通用技术和核心器件,制造射频光子相控阵样机,用于下一代雷达和电子战系统。根据俄罗斯塔斯社最新报道称,ROFAR 采用分布式系统,可以发射带宽高达100 GHz的信号,发射机能效大于60%,可以对几百km外的物体实现3D成像[20]。相对于传统雷达,ROFAR雷达的系统质量降低50%,分辨率可以提升数10倍。未来,这些射频光子相控阵单元有望用于俄罗斯“智能蒙皮”计划中和第六代战斗机上,实现集无源侦收、有源探测、电子对抗和安全通信多功能于一体的360°全覆盖扫描以及机上资源的一体化调度;ROFAR也有可能安装在俄罗斯正在研制的飞艇上,利用飞艇大表面优势,将天线阵列分布于蒙皮上,为俄罗斯提供导弹预警(图10)。
图10、ROFAR 雷达及其可能应用的飞艇与战斗机Fig. 10 Photos of ROFAR radar, the seaplane and the fighter
1.4 国内微波光子雷达研究进展
从公开的报道来看,国内微波光子雷达的研究可以追溯至21世纪初,虽然相比美国和欧盟起步略晚,但发展极为迅速。2013年南京航空航天大学成立了雷达成像与微波光子技术教育部重点实验室,先后开展了基于光纤连接的分布式雷达[21-22]、超宽带噪声雷达[23-25]、无源雷达[26]等雷达系统研究。2017年6月,南京航空航天大学联合中国电子科技集团第14研究所研制出了可实现小目标实时成像的微波光子雷达验证系统[27],如图11所示。该系统发射端利用微波光子倍频技术将4.5~6.5 GHz 的线性调频信号倍频到K 波段(18~26GHz),由天线辐射到自由空间。该宽带信号经待测目标反射后,由接收天线收集并与参考信号进行光混频去斜,得到仅包含目标距离,多普勒频移等信息的低速信号。通过数字信号处理实现对待测目标的实时成像。该系统利用微波光子技术对接收信号进行预处理,在不损失信息量的前提下极大地压缩了数据量,成功实现了对小尺寸目标的实时高分辨成像,成像精度优于2 cm。此技术突破了电子技术对带宽与处理速度的限制,能为高精度实时雷达目标监测提供可靠的技术支持。课题组还对小型非合作目标无人机进行了高清实时成像。同期,中国科学院电子学研究所微波成像技术国家重点实验室的研究团队也完成了基于微波光子技术的SAR成像研究[28],其雷达发射信号带宽为600 MHz,对应成像分辨率25 cm。该系统实现了大型非合作目标波音737的成像,如图12所示,有效论证了微波光子雷达的可行性。清华大学也报道了一种用于测距和成像的光子雷达系统[29],该系统利用1个4位光数模转换器(DAC)产生了1个中心频率10 GHz,带宽4 GHz的线性调频信号,经发射天线发射、目标反射及接收天线接收后,携带上目标的距离和速度等信息。该光子雷达系统的距离精度为5 cm,测速精度为2 m/s。此外,2015年上海交通大学还报道了基于锁模激光器的光子雷达系统,用于测距[30],该系统原理如图13所示,发射机利用两路啁啾的光脉冲拍频得到中心频率和带宽可调谐的线性调频信号,经过待测目标反射回接收天线,所接收的信号经过光电调制器调制到光信号的幅度上,再经过一段色散光纤进行时域拉伸后输入光电探测器进行包络探测,得到携带距离信息的信号。在测距实验中,所产生的线性调频信号中心频率为10 GHz,带宽为4 GHz,成功区分出4 m外相距6 cm的2个目标。
图11、南京航空航天大学实时成像光子雷达系统及实验结果
Fig. 11 Schematic diagram and the experimental results of the real-time imaging microwave photonics radar of Nanjing University of Aeronautics and Astronautics (NUAA)
图12、中国科学院电子学研究所波音737 外场测试ISAR 成像结果
Fig. 12 ISAR imaging results of Boeing 737 with the microwave photonics radar developed by Institute of Electronics, Chinese Academy of Sciences
图13、上海交通大学光子雷达样机Fig. 13 Photonics radar prototype developed by Shanghai Jiao Tong Univeristy
从上述若干典型微波光子雷达系统可以看出,微波光子技术的引入可以大大提升了雷达系统的性能,例如探测精度得到提升、多波段多功能实现融合等,但大部分雷达系统还只是能力演示,难以真正实用,因此,对微波光子雷达系统中关键技术的研究与提升仍然是当前关键。
2、微波光子雷达关键技术
雷达是通过发射电磁波并接收回波来探测目标位置、速度和特性的系统,一般由中控设备、发射机、接收机等组成,基本原理如图14所示。波形发生器产生的雷达波形与本振信号混频至所需波段,通过波束形成网络实现发射波束的空间指向控制,经由阵列天线辐射到空间。接收时,接收到的信号经过分发、切换和传输,再经过波束形成网络实现不同空间方向的信号收集,随后变频、滤波、数字化,输入到信号处理器中进一步处理。从上述系统可以看出,雷达系统的关键技术包括高性能本振产生、任意波形产生、混频、波束形成、模数转换等。下面从5方面深入探讨微波光子雷达的关键技术。
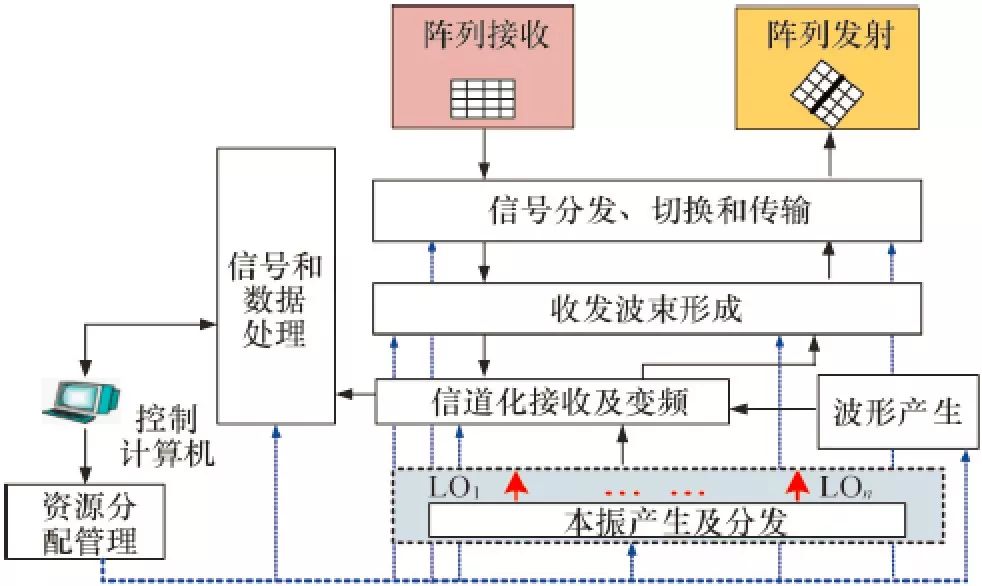
图14、传统雷达系统原理Fig. 14 Schematic diagram of the traditional radar system
2.1 本振信号光产生
在雷达系统中,本振信号质量的好坏很大程度上决定了发射信号和接收机中频信号的质量。一个高稳定低相噪的本振源对弱目标探测至关重要,否则目标回波信号将淹没在噪声中难以提取。另一方面,本振信号还作为参考信号提取回波信号的延时,得到目标的位置信息等,不稳定的信号会对延时的测量引入较大误差,影响雷达的探测性能。此外,为了降低系统的虚预警率,本振信号需具有较大的边模抑制比。随着下一代雷达系统对更高载波频率的需求,传统的电微波产生方法不断显现出其局限性。光电振荡器(OEO),作为一种产生高频谱纯度微波和毫米波的新型信号源[31],可产生数MHz到数百GHz的高纯度微波或毫米波信号,相位噪声可以达到接近量子极限的-163 dBc/Hz@10 kHz,是一种非常理想的高性能微波振荡器。
光电振荡器的基本结构如图15所示,主要由激光器、电光调制器、光电探测器、放大器和带通滤波器等组成。光源发出的连续光信号进入电光调制器进行强度调制,然后经过光纤传输后进入光电探测器。光电探测器将光信号转变为电信号后进入由微波放大器、带通滤波器组成的选频、放大链路,其中带通滤波器执行选频操作,抑制不需要的杂波,微波放大器提供微波信号增益。最后微波信号输入电光调制器,调制光源发出的连续光信号,形成反馈回路。信号在整个回路中多次循环,经过不断光电转换、放大及反馈过程,最终建立起稳定的自激振荡。由于光纤的损耗较低,电光调制器和光电探测器之间的光纤可以长数km或数十km,这将大大提高振荡腔的储能时间,而储能时间又正比于振荡器的品质因数,所以光电振荡器可以振荡出超高纯度的微波信号。作为比较,传统微波谐振腔的腔长仅为数cm,因此光电振荡器的相位噪声可有若干数量级的降低。当前国内外对光电振荡器的研究主要集中在4个方面,一是突破光电器件带宽的限制实现高频微波信号产生,二是实现超高纯度超低相位噪声信号的产生,三是有效抑制边模和杂散,四是提升所得信号的频率稳定度。
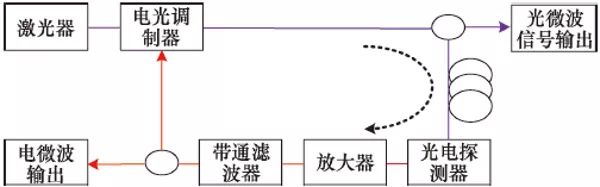
图15、光电振荡器的基本结构Fig. 15 Schematic diagram of the basic structure of OEO
为了实现高频微波信号的产生,可以在振荡器内采用新型大带宽器件,譬如:美国中佛罗里达大学采用带宽70 GHz的电光调制器和光电探测器以及高精细度的法布里-珀罗(Fabry-Perot,F-P)标准具实现了最高频率为60 GHz的光电振荡器[32];北京大学基于布里渊散射效应实现了60 GHz的可调谐光电振荡器[33];也可以在光电振荡器内进行倍频,例如南京航空航天大学微波光子学实验室提出的基于偏振调制器的倍频光电振荡器等[34-36]。
在光电振荡器中,输出信号的相位噪声主要来源于激光器、光电探测器、放大器等有源器件的热噪声、散射噪声及相对强度噪声,因此要降低信号的相位噪声,可以通过优化各器件(如激光器、调制器、探测器、放大器等)的参数与工作状态(偏压、增益、饱和、非线性等),并结合使用长光纤环路(因长光纤会带来衰减、非线性、色散等,并非越长越好)[37]。
为了获得高的边模抑制比,最直接的方法是采用很窄的滤波器滤除边模。但是为了得到高Q 值,通常需要选取长光纤,这就使得振荡模式间隔极小,普通的电滤波器或光滤波器很难滤除所有的边模。通常的解决办法是构建2个或多个环路,利用游标卡尺效应,实现边模的有效抑制[38-39]。还有一种方法是用超高Q 值的光滤波器,如相移-光纤布拉格光栅(PS-FBG)[40]、法布里-珀罗(F-P)腔、回音壁模式谐振器等[41-42]。这种光滤波器既可以精细滤波,本身也是一种良好的储能器件,因而可以代替长光纤,这使得光电振荡器的结构极为紧凑,甚至可以集成[42]。还可以采用耦合式光电振荡器结构,通过主动锁模光纤激光器环路提高振荡器的Q 值,从而避免长光纤的使用[39,43]。此外,基于外部注入锁定的光电振荡器通过将OEO的振荡模式引导至外部注入信号频率处,并形成振荡。由于注入信号的激励作用,OEO的边模可被极大抑制[44]。
由于OEO的环路主要由光纤构成,其腔长容易受到环境的温度、应力等影响发生变化,直接造成起振基频的变化,从而使输出频率发生漂移或跳频。当前维持光电振荡器稳定振荡的主要思路是将其小型化并加以适当的锁相环、工程封装和温度控制。例如,OEwaves公司开发了一种可集成的回音廊模式谐振器代替光纤形成高Q 值振荡腔,已将OEO向实用化推进[45];欧洲空间局提出采用对温度不敏感的特殊光纤(如实芯光子晶体光纤)代替普通单模光纤,降低振荡腔对环境的敏感度;同时,美国空军实验室使用锁相环技术实现了光电振荡器的频率稳定输出[46]。
国内对光电振荡器的研究稍晚于国外,且研究更多地集中于基于光电振荡器分立器件系统的研究与应用。清华大学娄采云课题组[47]首先将光电振荡器应用于时钟提取与分频研究中。天津大学于晋龙等[48]基于光偏振复用技术实现新型双环OEO。此外,北京大学、浙江大学、中国科学院半导体研究所、东南大学等国内多个高校和研究所在国家自然科学基金等项目的支持下,也对光电振荡器进行了深入研究,实现了多种结构的光电振荡器,形成了若干样机,并用于码型转化、射频上下变频、时钟恢复等信号处理单元中。图16为南京航空航天大学构建的基于注入锁定及锁相技术的光电振荡器原理样机。该样机的输出频率为10 GHz,1 kHz 频偏处的相位噪声低于-125 dBc/Hz,10kHz频偏处的相位噪声低于-148 dBc/Hz,杂散抑制比>80 dBc,阿伦方差@1 s为10-12。
图16、南京航空航天大学的10 GHz 超低相噪光电振荡器Fig. 16 Photos and phase noise of the ultra-low phase noise OEO of NUAA
2.2 雷达波形的光学产生
在雷达系统中,发射信号的功率、时宽、带宽、编码形式等参数决定了系统的探测距离、探测精度和抗干扰能力。随着下一代雷达系统对探测能力的要求越来越高,传统电子波形产生技术已越来越难以满足雷达系统的需求。当前电子较好的技术水平能生成与处理的信号带宽往往低于2 GHz。而某些新型雷达已希望具备5~10 GHz甚至20 GHz以上的超大带宽信号生成能力,以期达到cm量级的分辨率,从而大幅提升雷达系统的识别能力。受益于光子技术的大带宽,微波光子技术提供了超大带宽雷达信号产生的可能性。当前微波光子雷达波形产生的思路主要有5种。
第1种是光频时映射法。光脉冲发生器产生一串超窄脉冲(宽谱信号),经光频谱整形器将信号频谱刻画成所需信号的时域形状,再经过色散元件将频谱形状映射到时域,通过光电探测器检测出时域包络,得到所需要的信号。美国普渡大学的Weiner课题组[49]对这种方法研究较为深入。加拿大渥太华大学[50],国内的上海交通大学[30]、西南交通大学[51]、南京航空航天大学[52]等对此都有所研究。这种方法的优点在于可以灵活控制输出信号的波形,可以产生带宽高达50 GHz的超大带宽信号。但是其局限主要在于所产生信号的时宽较小,通常只有几ns,难以满足远距离雷达的需求。
第2种是光注入半导体激光器法。由于半导体激光器腔长极短(数百μm量级),从外界注入光功率消耗腔内载流子,即可改变谐振腔的等效折射率,进而改变谐振波长。这个特点使得高效、高速操控光信号的频率、相位和幅度成为可能。若外注入光仍然存在,其波长与激光器谐振波长的间隔在微波波段,则可以产生频率、相位和幅度可高速调控的雷达波形。国际上,加州大学洛杉矶分校的Liu课题组[53]对此研究较为深入,实验和理论详细研究了光注入半导体激光器的各种非线性动态特性,并从光谱特性上分析了各种动态现象的成因。本课题组也基于这种方法提出了宽带雷达波形产生方案[54-56],即通过改变调制在外注入光上的低速电信号动态地控制注入到激光器的光强度,进而实现对所产生微波信号瞬时频率的控制。改变低速电信号的参数,则雷达波形的带宽、时宽、重复频率、中心频率、波形种类等参数均随之改变,波形切换速度快(<100 ps)。基于这种方法,本课题组使用一个100 kHz重频的锯齿波得到了带宽大于12 GHz、时宽大于10 μs的线性调频信号[54];使用多电平阶梯波信号得到了高速跳频微波信号(包括线性递增序列和科斯塔斯序列等)[55]。
第3种是电光相位调制与外差法。基本原理是根据目标波形计算出其相位随时间变化的关系式,然后相位调制2个相位相关的光波长,使相位差等于所需的相位表达式,最后经过光电探测器拍频即可得到所需的波形。这种方法较为简单,可以实现任意波形的产生[57-61]。但它的主要问题在于调制器所能承受的最大功率有限,调制系数较低,所生成信号的时宽带宽积受限(通常只有10左右)。为了解决这一问题,提出一种基于分段调制方法等效提升系统的调制系数,得到了中心频率可连续调谐,带宽为4 GHz,时宽为1 μs的大时宽带宽积线性调频信号。相对于未分段情况,这种方法可将时宽带宽积提升了500倍以上[62]。
第4种是微波光子倍频法。将电域产生的波形经过电光转换调制到光信号上,通过微波光子倍频技术增加波形的中心频率和带宽。这种方法的优点在于结合了光电各自的优势:电系统产生窄带信号已经非常成熟,而光技术的宽带特性使其在宽带倍频方面优势明显,从而能够产生高频大带宽信号。日本情报通信研究机构对此研究较多。实验最高产生了频率75~110 GHz、脉冲持续时间20 μs、时宽带宽积为7×105的线性调频信号[63]。也基于这种方法在电域产生时宽为1 μs的4.5~5.5 GHz和7~8 GHz的线性调频信号,利用偏分复用双平行马赫增德尔调制器得到了4倍频的18~22 GHz和28~32 GHz的双波段雷达发射波形[64]。
第5种是光数模转换(DAC)法。基本原理是通过设计不同的数字信号序列,然后经过数模转换产生所需的波形。DAC 根据其主要结构可以划分为并行加权DAC、串行加权DAC这2种。并行光DAC最早由美国IPITEK公司于2003年提出,利用并行电光调制器实现了2 bit,80 MSa/s的数模转换[65]。而串行光DAC 最早由日本电报电话公司(NTT)于2001年提出,基于加权延时叠加实现了10 GSa/s和2 GSa/s信号速率的数模转换[66],并将其应用到脉冲信号产生中。清华大学郑小平课题组[67]于2015年提出一种基于脉冲整形的并行光数模转换方案,实现了10 GSa/s、4 bit的光数模转换,得到了15 GHz/30 GHz的锯齿波和正弦波信号。本课题组于2017年提出一种基于相位调制和色散的串行光DAC方案[68],实验得到了2.5 GSa/s,有效比特数为3.49的光DAC,利用该DAC产生了三角脉冲、抛物线脉、方形脉冲和锯齿脉冲。
2.3 信道化接收与混频
微波光子信道化接收机在光域将宽带的接收信号分割到多个窄带的处理信道中,然后对每个窄带信道中的接收信号进行光电探测和信号处理。相比传统信道化接收机,微波光子信道化具有较强的抗电磁干扰能力、较大的承载带宽和瞬时带宽、极低的传输损耗等显著优势。而且信道化本质上是1个多通道并行处理系统,而光域丰富的光谱资源和灵活的复用手段(例如波分复用)与此不谋而合,因此微波光子信道化得到了广泛关注。
微波光子信道化的实现原理大致可以分为以下2类,基于频谱切割的信道化接收机[69]和基于多通道变频的信道化接收机[70]。顾名思义,基于频谱切割的信道化接收机就是利用滤波手段直接对调制到光域的射频信号进行频谱切割,通过对切割的光信号进行光电探测和信号处理,从而实现信道化。这种方法简单直观,难点在于对滤波器的要求较高。目前看来,窄带、通带平坦、阻带抑制比大及滤波边沿陡峭的滤波器组无论是集成技术还是分立元件都比较难实现。此外,由于光电探测将丢失相位信息,因此该信道化方法通常只能实现对信号有无的判断,无法得到信号中的信息。基于多通道变频的信道化接收机就是将接收信号与多个不同频率的本振信号混频。因为本振信号的频率在每个通道内不同,所以可以将不同频率处的频谱分量下变频至基带或者中频,从而实现信道化。因为不需要对调制的射频信号直接进行频谱切割,所以基于混频的信道化方法对滤波器的要求较低,只需要按照光频梳的间隔进行粗粒度的通道划分。其次,若后端采用相干解调技术,可以在信道化的同时实现信息的提取。但是该方法最终仍受限于数字信号处理器,因此大瞬时带宽的正交处理较难实现。
国内外在微波光子信道化接收机方面开展了诸多深入研究。针对基于频谱切割的信道化接收机,研究重点在于如何实现一系列高性能的光滤波器。由于光子集成技术的飞速发展,集成化的光滤波器成为研究热点。例如,潘时龙课题组设计了基于多个微环的信道化滤波器[71],通过调节微环参数改善滤波特性,从而优化信道化的性能。澳大利亚皇家墨尔本大学研制了基于F-P的集成滤波器阵列,用于微波光子信道化接收机[72]。针对基于混频的信道化,北京邮电大学徐坤课题组[73]利用一对相干光频梳实现了通道为7、信道带宽为500 MHz的微波光子信道化接收机。为了降低对后端数字信号处理芯片的要求,本课题组提出了基于宽带微波光子镜频抑制混频的模拟域正交处理方法。与传统基于数字正交解调方法不同的是,该方法利用光90°混波器和双光电探测器实现I/Q混频,将得到的正交中频信号通过90°微波电桥耦合起来,进而实现镜频抑制混频。借助光混波器平坦的幅相响应特性,可在较大带宽范围内实现镜频抑制比较高的混频,从而在模拟域实现宽带的杂散抑制,大幅减少后端的计算量[74]。
基于宽带微波光子镜频抑制混频,本课题组还提出了一种微波光子一体化射频前端的总体架构[75],如图17所示,包括多频光本振、可编程光处理器、多通道镜频抑制混频3部分。首先在多频光本振模块产生2个间隔不同的光频梳,1个作为本振光频梳,另1 个作为参考光频梳来调制接收的信号。可编程光处理器用于信道选择,选出想要接收的信道,通过镜频抑制混频,将每个信道的信号下变频到基带或者中频。由于镜频抑制,仅光本振一侧的信号被下变频,另一侧不会发生频谱交叠。这样便实现了同时多个载频宽带信号的信道化接收,且自动变频到基带或中频。以上是信号接收的过程。如果要进行信号发射,可进行相反的操作,将基带或中频信号上转换到多个载频处。该方案实现了S,X,K,Ku,Ka 5个波段,镜频抑制超过30 dB的多通道阵列一体化无串扰接收和可重构的上变频发射。
图17、微波光子一体化射频前端Fig. 17 Integrated microwave photonic radio front-end
2.4 光控波束形成网络
波束形成主要分为相移法和延时法2种,基本原理是通过控制阵列天线中各发射信号的相位或者延时,使得波束在特定的波前方向干涉相加。尽管基于移相的波控技术在电学中已经非常成熟,但由于光学方法具有频率高、尺寸小、质量轻、传输损耗小、响应快速、抗电磁干扰等特性,因而基于移相的光控波束形成网络的报道仍然很多。这种技术可以应用于对瞬时带宽要求较低,但频率范围较大的系统中。目前报道的比较典型的有澳大利亚悉尼大学Yi课题组[76]提出的基于可编程光处理器的方法,利用可编程光处理器操纵每一路信号的幅度、相位等,实现了1个4阵元的波束形成网络。本课题组也提出一种基于微波光子移相的波束形成网络[77],实现了1个14 GHz、4阵元的相控阵天线。然而相移法对于瞬时带宽较大的信号具有波束倾斜效应,难以满足下一代雷达系统对大带宽的需求。解决这一问题的方法就是用真时延替代移相,实现光控真延时波束形成[78]。
光控真延时波束形成的研究首先需要解决的是光控微波延时的问题。目前,光控微波延时的方法主要可分为调节光器件响应函数和调节光载波参数两大类。调节光器件响应函数是指通过改变光链路中的1个或几个器件的光相频响应,改变光群延时,进而控制光波所携带微波信号的延时。具体实施方式有以下几种:改变光路径长度[79]、重构相位可编程光滤波器[80]、利用慢光效应[81]、热调谐光微环谐振器[82]等。调节光载波参数同样可以改变光载微波信号的延时。由于啁啾光纤光栅等光色散元件在不同的光载波波长下的群时延不同,光载微波信号的延时可由光波长控制[82-83]。值得注意的是,因为此处的延时调节不改变光色散元件的参数,需要不同延时的多路微波信号可通过不同光载波承载而共用一条光延时链路,系统的结构可因此而简化。基于这一原理,本课题组提出一种面向多频段多波束控制的多功能光真时延单元[84],如图18(a)所示。该单元以光频件为基础,通过光滤波器选择光频梳的不同梳齿控制各支路上射频信号的时延。由于射频信号的时延控制和频率选择由不同部件实现,该单元可独立地控制不同射频信号的时延,使系统能同时实现对多个波束的独立控制。这种真时延单元可支持接收和发送两种模式,具有较大的灵活性与可重构性。
此外,为了充分利用光的并行处理优势,利用有限的元器件将光控微波延时单元高效组成波束形成网络同样是光控真延时波束形成的重要研究内容[85]。针对平面相控阵系统的二维延时控制需求,以可调色散器件为基础,提出一种紧凑型光控波束形成网络[86]。该网络可在方位和俯仰2个维度上以控制延时的方式实现对宽带射频波束的灵活控制,其结构如图18(b)所示。该二维波束形成方案中,对各路信号的二维延时控制集中于唯一的可调色散器件中,与国际上常见的两级延时调节方案相比,该方案的一级延时调节具有结构紧凑,易于实现通道均衡等优势。此外,还对小型化紧凑化片上光控波束形成网络进行研究,实现了基于快慢光拓展光微环谐振器延时带宽的光控波束形成芯片,如图19所示。
图18、南京航空航天大学提出的真延时单元Fig. 18 True time delay modules developed by NUAA
图19、光控波束形成芯片Fig. 19 Photo of the optically controlled beamforming chipof NUAA
另一方面,由于光控真延时波束形成系统突破了信号带宽的限制,传统的、面向单音或窄带信号的测量与评价方法已不再适用。为充分评估光控波束形成系统处理大瞬时带宽信号的性能,本课题组提出一种基于扫频测量和相关接收的评估方法[87]。其中,各观察角度下的扫频测量可得到波束形成网络及天线阵列在关心频段中的全部复频率响应信息;而各观察角度下相关接收机输出信号的峰值可用来定义一种新的方向图,这种方向图可反映激励信号频段内的总体频率响应,且对远场接收到信号的时域失真敏感。同时,为节约暗室测量的成本,单频下的方向图相乘原理也被推广至宽带场景,故阵列响应可由单阵元频率相关方向图与波束形成网络的频率相关阵因子相乘而得出。图20展示了应用所提出评估方法在较小暗室下测量大阵列的流程。
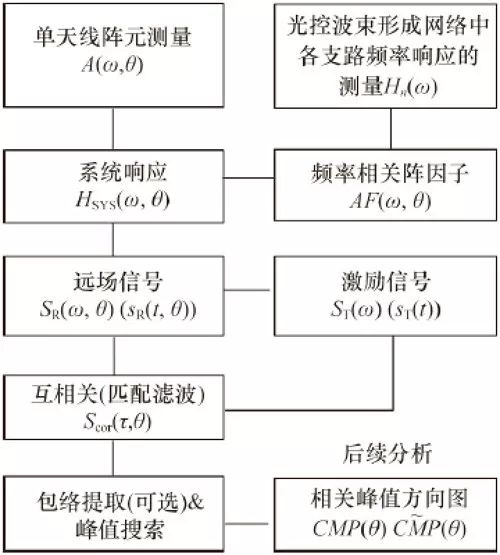
图20、面向宽带信号的光控波束形成系统评估方法
Fig. 20 Performance evaluation method of photonicsbased RF beamforming with large instantaneous bandwidth
2.5 光模数转换
随着数字信号处理技术的飞速发展,雷达回波的信息提取基本上都在数字域完成。作为连接模拟域回波和数字信号间的桥梁,ADC在雷达接收机中发挥着重要的作用。由于ADC孔径抖动等原因,大的模拟带宽和高的有效位数在完全基于电子技术的ADC中难以兼得。因此,电ADC的性能往往成为限制宽带雷达发展的瓶颈。为突破电ADC的带宽瓶颈,具有大带宽、抗电磁干扰能力强等诸多优点的光子技术被引入到ADC系统中,构成了光子辅助ADC,使ADC发展到新的阶段。光子辅助ADC最早出现于20世纪70年代。经过40余年的发展,国内外学者提出了多种光子辅助ADC,将光子技术应用到了信号模拟预处理、采样保持、高速实时量化等多个方面。
光域信号预处理,是指将待转换的模拟电信号调制到光载波上,利用光器件的超大带宽实现对模拟信号的处理,以降低信号模数变换的难度,目前主要有信号时域拉伸[88-89]和信号复制[90-91]2种形式。时域拉伸型光子辅助ADC首先利用光脉冲在色散介质中的展宽来拉伸待转换的模拟信号,这等效为降低信号的瞬时带宽,因而采用低速电ADC即可完成信号的采样和量化。而信号复制型光子辅助ADC可在光域对待转换信号或其片段进行高质量复制,再将复制所得的多个相同信号在时域或频域展开,然后通过错位采样即可获得等效采样率的成倍提升。常用的光域信号复制方式包括时域上的多级间插[90]和复制缓存环[92],以及频域上的基于四波混频效应的多波长参量广播等。
光采样型光子辅助ADC利用激光脉冲对输入的电信号进行采样[93],基本结构如图21所示。锁模激光器输出光脉冲经复用送入电光调制器,其强度被待转换电信号所调制,光电探测器将光脉冲序列携带的电信号提取出来并送入电ADC进行量化。电ADC的高稳定度时钟信号由锁模激光器提供。由于电ADC的采样速率一般较低,可以在光电探测之前对光脉冲序列进行串并变换(即解复用)。这种光采样ADC利用了锁模激光器输出激光脉宽极窄,脉冲间隔时间抖动极小等特性,使传统电ADC因孔径抖动导致的噪声和失真大大降低。由于电光调制器具有几十GHz的调制带宽,光采样模数转换系统只需选用市场上ENOB高但模拟带宽较小的电ADC,便可实现高精度的射频带通采样。
图21、光采样型光子辅助ADC 的基本结构Fig. 21 Schematic diagram of the photonic sampled ADC
光子技术同样可应用于模拟信号的实时量化。信号量化的本质是将待转换信号的瞬时幅度映射成多路可供比较器进行门限判决的强度脉冲,映射所得的并行支路越多,则量化位数越高。光量化方案中的这种映射主要由并行多路电光强度调制或光孤子自频移效应实现。在并行多路电光调制结构中,各支路具有不同的强度调制特性:不同的半波电压[94]、有相移的相同半波电压[95]以及二者的混合[96]。当调制端口输入的模拟电信号变化时,各调制支路输出的光强按不同的规律改变,经后续处理即可组合出不同的编码。而基于光孤子自频移效应的方案[97-98]先用待转换电信号调制光脉冲串的幅度,再利用频移与光脉冲幅度的关系将幅度信息映射到光波长域,最后通过光色散器件将不同波长的光分开。这种方案已经实现了6位的量化分辨率[99]。
3、结论与展望
雷达是现代战争中极为重要的军事装备,是海、陆、空、天各兵种的“眼睛”。为了擦亮这只“眼睛”,下一代雷达向着高频率、超宽带、多功能一体化方向发展,以期在提高距离分辨率、改善目标识别成像等诸多性能的同时,又能提高雷达的隐蔽性与抗干扰性能。微波光子技术凭借其宽带、抗电磁干扰等特性,将逐步取代部分传统电技术在雷达系统中发挥作用。当前该领域的研究,已经从单元研究向系统研究转变,全面进入了雷达样机研制和功能演示阶段。但是微波光子雷达各关键技术的融合,系统指标的提升,转换能效,动态范围,可靠性等方面还需进一步提高以满足实战系统的需求。尤其是光电集成技术相对于纯电集成技术还较初步,这必将限制微波光子雷达系统的应用范围。但是科技因未知而美妙,因探索而精彩。通过研究人员在超低相噪光电振荡器、超宽带波形产生、多功能信号处理、光控真延时波束形成网络以及各技术之间融合的探索,一定能推动微波光子雷达系统的大发展。
-
浅析CDMA关键技术2009-08-27 5784
-
智能穿戴设备关键技术及其发展趋势2015-06-30 19084
-
3G终端的关键技术和发展趋势2010-03-26 2777
-
汽车总线及其关键技术的研究2012-07-10 18940
-
物联网关键技术及其发展2012-08-14 2757
-
新能源汽车电机驱动关键技术及发展趋势2016-05-12 5498
-
蓝牙技术未来的发展趋势2019-03-29 3897
-
远端射频模块关键技术创新及发展趋势介绍2019-06-18 4508
-
传感器将会有哪些发展趋势?2020-11-26 6333
-
汽车电子技术的发展趋势是什么?2021-05-17 7101
-
析RFID技术的发展趋势2019-08-20 4906
-
5G关键技术及发展趋势的详细资料说明2020-06-23 1202
-
雷达技术未来发展趋势分析2021-08-04 7278
-
汽车环视技术发展趋势浅析2022-11-02 561
-
5G时代双千兆关键技术发展趋势探讨.zip2023-01-13 453
全部0条评论

快来发表一下你的评论吧 !
