

智能垃圾桶感应开盖方案:WT4001A-C01 红外感应模块的精准接近检测
描述
回忆一下你以往的生活当中有没有遇到这种情况:你刚处理完一条鱼,手上满是油脂腥味。水龙头要用手去拨动开关,洗完手还要洗水龙开关,垃圾桶盖子紧闭。用手去碰?洗两遍都觉得不够。用脚踩?不是每款桶都带踏板。用手肘顶、膝盖撞——狼狈。
智能感应垃圾桶要解决的,就是这个不方便用手的瞬间。但说实话,市面智能感应开盖垃圾桶有很多看似竞争很激烈,但是很多产品都有一个问题:该开的时候不开,不该开的时候乱开。
人走近它开了,猫跳过它开了,阳光斜照也开了。
WT4001A-C01 想解决的,就是让垃圾桶稳定的感应做到精准接近检测。
一、方案核心:WT4001A-C01 红外感应模块
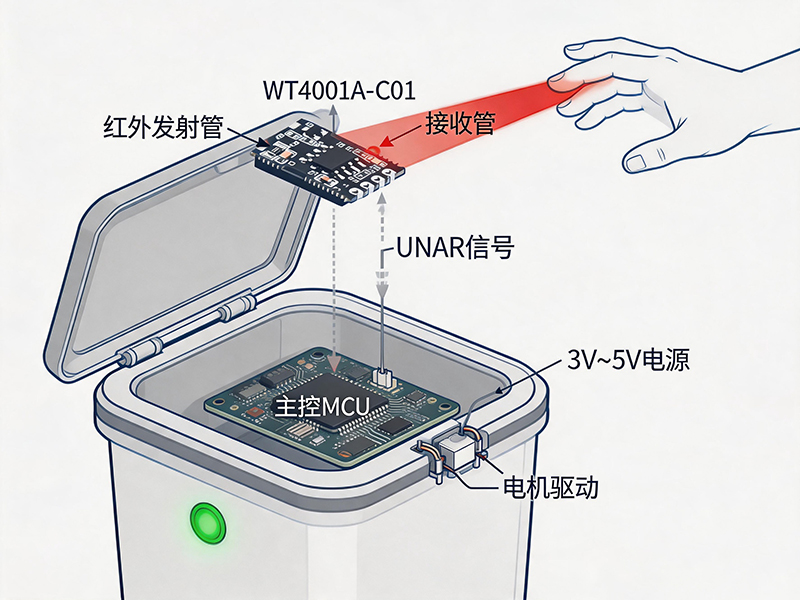
唯创知音 WT4001A-C01 是一款基于主动红外反射原理的接近检测模块。MCU 内部实时比对红外反射能量变化,输出物体接近状态及距离信息。
核心参数:
| 参数 | 规格 |
| 检测距离 | 5 cm ~ 90 cm |
| 工作电压 | 3.0 V ~ 5.0 V |
| 工作电流 | 35 μA |
| 待机电流 | 16 μA(3.3 V,70 cm,1 s 检测周期) |
| 响应速度 | 250 / 500 / 1000 / 2000 ms 四档可调 |
| 红外发射能量 | 0% ~ 100% 可调 |
| 通信接口 | UART(9600 bps,3.3 V TTL)+ I/O 电平输出 |
| 工作温度 | -20°C ~ +70°C |
| 模块尺寸 | 17.50 × 10.00 × 7.60 mm |
| 引脚间距 | 2.00 mm,6 pin |
引脚定义
| Pin | 名称 | 功能 |
| 1 | VCC | 电源(3.0 V ~ 5.0 V) |
| 2 | GND | 地 |
| 3 | INT | 检测状态电平输出 |
| 4 | DAT | 距离学习按键输入 |
| 5 | TX | UART-TX(3.3 V TTL) |
| 6 | RX | UART-RX(3.3 V TTL) |
二、五个维度,逐个击破垃圾桶感应痛点
WT4001A-C01是距离渐变感知 —— 而不是"有/无"开关
低成本的红外方案的底层逻辑很简单:红外反射量超过固定阈值,输出高电平。结果就是不管物体来还是去,行为完全一样。
WT4001A-C01红外感应模块通过 UART 输出的是连续距离信息,主控 MCU 拿到的结果是"距离在变近"还是"距离在变远",而非简单的二值判断。这意味着你可以设定不同的行为逻辑:
- 物体从 90 cm 靠近至 30 cm → 开盖
- 物体从 30 cm 远离至 60 cm → 关盖
对于慢动作靠近的场景(端着盘子往桶里倒剩菜),这段"渐近感知"是区分真实意图和路过误触的分水岭。
广角覆盖 —— 不挑方向
常规红外传感器为追求远距,往往把发射角压得很窄。结果就是你必须把手正对传感器,偏一点都不行。
WT4001A-C01 采用宽发射角设计,实际覆盖范围显著大于同类窄角方案。垃圾桶周围伸手即开,无需刻意对准。这一特性对圆形或异形桶身尤其友好——从侧面、斜上方靠近,同样感知得到。
距离学习 —— 一版硬件适配多种桶形
不同垃圾桶的材质、颜色、内壁反射率差异巨大。不锈钢桶 vs 白色塑料桶,红外反射条件完全不是一回事。
WT4001A-C01 支持 UART 指令(0xB1)距离学习功能。部署时发一条指令,模块以当前环境为基准自动校准检测阈值。换桶不换模块,重新学一次即可,无需二次开发调参。
35 μA 工作电流 —— 两节电池撑半年
垃圾桶供电方式大多是电池,功耗直接决定产品体验。
WT4001A-C01 工作电流 35 μA,待机 16 μA。做一道算术题:两节 AA 碱性电池约 2500 mAh,按每秒检测一次、每次 35 μA 持续 2 ms 估算,日均耗电不到 0.1 mAh。
再加上红外发射能量可通过 UART 指令(0xB3)在 0%~100% 之间调节——近距离场景压低发射功率,续航轻松超过半年。
四档响应速度 —— 灵敏度与防抖兼顾
| 档位 | 响应时间 | 适用场景 |
| 1 档 | 250 ms | 快速挥手感应 |
| 2 档 | 500 ms(默认) | 标准家用垃圾桶 |
| 3 档 | 1000 ms | 防猫 / 宠物误触 |
| 4 档 | 2000 ms | 人体缓慢靠近检测 |
通过 UART 指令(0xB2)切换。默认 500 ms 已覆盖多数家用场景。有宠物的家庭调至 1000 ms 档——猫从桶上跳过的瞬间不够触发,人手伸过去的时间绰绰有余。
三、硬件接口与通信
WT4001A-C01 提供两种并行输出模式,同时工作、互不冲突:
**I/O 模式**:INT 引脚直出高低电平。检测到物体输出高电平(极性可通过 UART 指令 0xB5 反转),物体离开恢复低电平。主控直接读 GPIO,接入成本为零。
**UART 模式**:9600 bps,8-N-1,3.3 V TTL。通信前需先发唤醒前缀 0x00 0x00。可获取距离数据、配置距离学习、响应速度、发射能量、输出极性。
最简单的部署:只用 I/O 模式即可实现开关盖控制。
四、部署建议
安装位置
模块置于垃圾桶顶部边缘内侧,发射面朝外下斜 15°~30°,覆盖手部常用接近区域。
开关盖逻辑建议
| 距离区间 | 状态 | 动作 |
| > 90 cm | 无检测 | 待机 |
| 30 ~ 90 cm | 物体靠近中 | 预判开盖(500 ms 内持续靠近确认) |
| < 30 cm | 确认靠近 | 保持开盖 |
| 30 ~ 60 cm(退出中) | 物体离开中 | 延时 2 s 关盖 |
防误触策略
- 响应速度设为 2 档(500 ms),过滤瞬时遮挡
- 红外发射能量依据桶身材质调至合理档位,避免内壁反射饱和
- 结合距离渐变方向判断,仅"由远到近"触发开盖,屏蔽"由近到远再回波"的干扰
五、总结
WT4001A-C01 给智能垃圾桶的不是一个"红外开关",而是一组可编程的感知行为。
35 μA 的功耗控制、90 cm 的距离渐变检测、四档响应速度、距离学习——这些不是参数表上的数字,是实际解决误触、解决电池焦虑、解决"侧面不灵"的能力。
-
XD08M3232接近感应单片机在智能垃圾桶抗干扰性分析2024-11-04 508
-
家用智能垃圾桶控制板方案设计原理以及设计中需要注意的事项2026-03-25 407
-
设计智能垃圾桶,感应并判断垃圾是否装满2013-05-22 12153
-
深联华单片机的智能垃圾桶系统设计2013-10-29 8186
-
【OK210申请】家用智能垃圾桶2015-06-29 2171
-
雷达模组感应技术发展,智能垃圾桶自动开关控制应用,存在感应雷达方案2021-10-11 1288
-
如何去实现一种基于单片机智能垃圾桶控制系统设计2021-11-09 1090
-
基于arduino制作的感应开盖垃圾桶2022-01-17 1679
-
智能垃圾桶语音芯片应用设计方案介绍,WT588F02B-8S2022-06-11 2741
-
智能感应垃圾桶的发展优势2021-10-05 4797
-
智能感应垃圾桶的原理2022-02-07 18208
-
红外感应技术在自动翻盖垃圾桶的应用(中微爱芯BISS0001)2022-04-29 2826
-
智能垃圾桶红外和TOF高精度感应方案2026-01-07 541
-
红外+按键多模感应!纳祥科技智能感应垃圾桶方案0.5秒极速响应2026-02-26 437
-
人体红外感应模块推荐:智能家居、电子门锁、洗浴设备方案2026-04-16 573
全部0条评论

快来发表一下你的评论吧 !
