

解析uwb无线定位系统的原理及主要技术特点
RF/无线
描述
UWB的定义
超宽带(Ultra Wide-Band,UWB)是一种新型的无线通信技术,根据美国联邦通信委员会的规范,UWB的工作频带为3.1~10.6GHz,系统-10dB带宽与系统中心频率之比大于20%或系统带宽至少为500MHz。UWB信号的发生可通过发射时间极短(如2ns)的窄脉冲(如二次高斯脉冲)通过微分或混频等上变频方式调制到UWB工作频段实现。
UWB定位
UWB是如何进行定位的,那么就需要使用一个东西叫做TOF(Time Of Flight)翻译过来也就是光飞行的时间。
UWB测距原理
首先定义一下再定位中需要哪些东西,大家都知道GPS需要三个卫星才能对移动设备完成定位,UWB定位中也是一样,我们需要固定三个UWB板卡,我们称这三个固定的UWB板卡为Anchor,然后称需要被定位的 处于移动状态的UWB板卡为Tag。
Anchor 到 Tag 之间的就可以通过光的飞行时间来进行测量了,举个最简单的例子, 一个Anchor 到一个Tag 的距离,可以直接使用Tag发送一个带有时间戳的数据包,Anchor接收到数据包之后,如果Anchor和Tag已经经过时间同步的话,Anchor根据本地时间和Tag发送时间包的时间戳的时间做差值,就能知道光飞行了多长时间,这样就能计算距离了,当然,这样会有很大的干扰,导致测不准,所以Decawave的工程师使用了另外一种方法:
Decawave测量TOF通过二次握手进行TOF时间的测量,测量原理如下图:
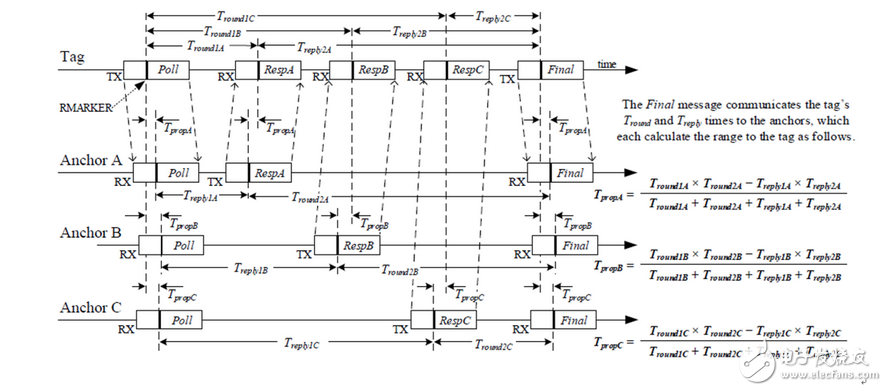
TOF二次握手原理
TOF测距方法属于双向测距技术,它主要利用信号在两个异步收发机(Transceiver)之间飞行时间来测量节点间的距离。因为在视距视线环境下,基于TOF测距方法是随距离呈线性关系,所以结果会更加精准。我们将发送端发出的数据包和接收回应的时间间记为TTOT,接收端收到数据包和发出回应的时间间隔记为TTAT,那么数据包在空中单向飞行的时间TTOF可以计算为:TTOF=(TTOT-TTAT)/2。
然后根据TTOF与电磁波传播速度的成绩便可计算出两点间的距离D=CxTTOF
TOF测距方法和两个关键侧约束:
1、发送设备和接收设备必须始终同步
2、接收设备提供信号的传输时间的长短
为了实现始终同步,TOF测距方法采用了始终偏移量啦解决始终同步问题,单由于TOF测距方法的时间以来与本地的远程几点,侧距精度容易受两端节点中的始终偏移量的影响。为了减少此类错误的影响,这里采用反向测量方法,即远程节点发送数据包,本地节点接收数据包,并自动响应。通过平均正向和反向多次测量的平均值,减少对任何始终偏移量的影响,从而减少测距误差。
定位原理
知道了UWB的测距原理,再来了解UWB的室内定位原理就很容易了。UWB的室内定位功能和卫星原理很相似,就是通过室内布置4个已知坐标的定位基站,需要定位的人员胡总恶化时设备携带定位标签,标签按照一定的频率发傻脉冲,不断和4个已知位置的基站进行测距,通过一定的精确算法定出标签的位置!
UWB定位的主要技术特点有
低功耗、对信道衰落(如多径、非视距等信道)不敏感、抗干扰能力强、不会对同一环境下的其他设备产生干扰、穿透性较强(能在穿透一堵砖墙的环境进行定位),具有很高的定位准确度和定位精度。SKYLAB UWB室内定位方案采用先进的软件和硬件来定位、跟踪和管理高价值、设备和人员,最大限度提供使用率。
-
uwb超宽带定位原理全面解析2018-10-16 4524
-
UWB超宽带定位技术概念2018-10-19 4140
-
UWB、RFID、蓝牙、WiFi定位技术比较2018-10-25 7522
-
UWB定位系统的定位原理和主要特点2018-10-30 3062
-
UWB定位技术使人员定位更精确2018-11-05 2450
-
UWB技术特点及优势2018-11-06 4054
-
基于UWB定位技术的定位系统2018-12-21 3123
-
UWB定位系统实现精确定位原理解析2020-03-19 2245
-
UWB高精度定位技术原理与应用分析2020-08-28 2948
-
uwb定位技术原理及应用场景2021-06-30 3288
-
UWB定位技术的特点与优势2021-09-10 4202
-
uwb定位系统,室内定位技术的潜力股!2021-11-04 1417
-
UWB技术的主要特点及应用领域2022-01-19 5225
-
UWB室内定位技术具备的特点2023-03-01 1883
-
巍泰技术 GNSS 与 UWB 无线定位系统技术差异与应用优势解析2025-02-08 1475
全部0条评论

快来发表一下你的评论吧 !
