

汽车电驱技术—电机工作原理详细解读
描述
在新能源汽车中,电机发挥着至关重要的作用。当车辆需要驱动前进或后退时,电机便展现出其电动机的特性,将电能高效转化为机械能,同时根据不同车速和加减速的需求,调整电机转速和扭矩输出,推动车辆行驶。而在车辆减速或制动时,电机则转变为发电机的角色,将机械能高效回收并转化为电能,实现能量的再利用。
本篇解读电机是如何工作的?电机如何实现加速与速、正转与转、驱动与发电等功能的。这些工作主要由电机控制器MCU(motor control unit)负责,电机控制器将动力电池的高压直流电变换为驱动电机的高压三相交流电,使驱动电机产生力矩,并通过传动装置将驱动电机的旋转运动传递给车轮,驱动汽车行驶。

电机控制器基本原理图
电机控制器基本功能电压转换:MCU将电池的直流电转换为三相交流电,驱动交流电机,这一过程通过内部逆变器实现,使用半导体开关器件如晶体管或IGBT来控制电流的频率和幅值。
速度与转矩控制:MCU根据驾驶条件调整电机转速和转矩,以适应不同的驾驶需求。
系统保护:MCU具备多种保护机制,如电池输入端保护、故障检测、电机控制器本体故障保护、过载保护等,以确保系统的安全和稳定运行。
诊断与反馈:MCU能够实时监测系统状态,向车辆的其他控制系统提供反馈,如电池状态、电机温度、控制器温度等。
速度与转矩控制:MCU根据驾驶条件调整电机转速和转矩,以适应不同的驾驶需求。
系统保护:MCU具备多种保护机制,如电池输入端保护、故障检测、电机控制器本体故障保护、过载保护等,以确保系统的安全和稳定运行。
诊断与反馈:MCU能够实时监测系统状态,向车辆的其他控制系统提供反馈,如电池状态、电机温度、控制器温度等.

电机控制器原理图
电机控制器的关键组件介绍

以下是电机控制器中的主要组件及其功能:
直流母排(busbar):直流母排是连接电池包和电机控制器的高导电性、低电阻、良好散热特性的导体。它确保直流电从电池包无损耗或低损耗地传输到电机控制器。
逆变器结构:电机控制器的核心是一个三相全桥逆变器,负责将直流电转换为三相交流电,驱动交流电机。逆变器由多个功率半导体开关组成,通过精确控制这些开关的开通和关断,实现对电机的精确控制。
电磁干扰(EMI)抑制:逆变器工作时产生的电磁干扰通过滤波组件如X电容和Y电容来减少。X电容和Y电容分别用于电源线路之间和电源线路与地之间的滤波,通常采用薄膜电容器或陶瓷电容器,并需符合特定的安全标准。
控制电路:控制电路是电机控制器的大脑,负责信号采集和控制算法实现。它通常包括微控制器或数字信号处理器(DSP)以及相关支持电路,其核心是功率模块,负责电能转换。
驱动电路:驱动电路为功率模块中的开关器件提供驱动信号,确保它们能够准确、快速地开关。
散热器:散热器用于散发功率模块产生的热量,保持关键部件在适宜的工作温度下运行。
信号采集:电机控制器需要采集电机端的三相电流信号和位置信号,以实现对电机状态的实时监测。这通常涉及到使用电流传感器等硬件。
交流输出铜排:电机控制器和电机之间的连接可能使用交流输出铜排,以传输三相交流电。铜排设计需考虑低电阻和高电流承载能力。

旋变传感器接口:电机的位置信号通常由旋变传感器提供,这些传感器需要与电机控制器的相应接口连接。
电流传感器集成:电流传感器一般集成在电机控制器内部,用于测量电机的电流,可采用霍尔效应传感器或空心穿孔式传感器。
这些组件的协同工作确保了电机控制器能够实现对电动汽车电机的精确控制,同时确保系统的安全性和可靠性
电机控制器的控制原理电机控制器(MCU)的设计原理如图所示。
 MCU主要由以下几个模块组成:
MCU主要由以下几个模块组成:
微控制器(Microcontroller):微控制器的核心功能是控制电压源逆变器(VSI),将电池接收的电能转换为所需的电能形式。它接收驾驶员的油门信号作为主要控制输入,通过调整脉宽调制(PWM)脉冲的占空比来控制速度和扭矩。微控制器中实施的场向量控制(FOC)确保了电机控制的高效性和快速性。
电压源逆变器(VSI):VSI负责将直流电转换为交流电,以驱动电机。通常使用六个MOSFET实现VSI,有时为了增加电流容量,也会使用MOSFET的并联组合。
相电流感应(Phase Current Sensing):使用基于霍尔效应的电流传感器来感应电机的相电流,确保精确控制。通常使用两个电流传感器感应两个相电流,第三个相电流则由这两个派生得出。
电源供应(Power Supply):MCU内置传感器需要适当的电源供应。此外,微控制器、电机温度传感器和位置反馈传感器也需要不同级别的电源供应。电源供应部分将固定直流电压转换为所需的不同级别电压。
栅极驱动器(Gate Driver):栅极驱动器电路用于放大微控制器产生的PWM脉冲的电压水平,确保信号的有效传递。
CAN收发器(CAN Transceiver):CAN收发器用于驱动和检测通过CAN总线传输的数据。它将控制器使用的单端逻辑转换为在CAN总线上传输的差分信号。
位置反馈传感器:这些传感器提供电机转子的位置信息,对于实现精确的矢量控制至关重要。通常使用编码器或旋变传感器来提供这些反馈信号。
温度传感器:温度传感器用于监测电机和控制器的温度,以确保系统的安全运行,防止过热。
这些模块的协同工作确保了电机控制器能够高效、精确地控制电机,同时确保系统的稳定性和安全性。
电机控制器控制策略电机控制器( MCU )为实现对驱动电机(如永磁同步电机, PMSM )的扭矩和转速控制,其常见的控制策略有:矢量控制( Field Oriented Control , FOC ):此策略为当下车载应用中最常见的控制方法,它能够独立控制电机的励磁磁场(永磁同步电机的励磁磁场由永磁体提供,不需要额外的励磁电流来建立磁场,这里指的是通过 Id 来维持磁通链稳定)和转矩磁场,从而实现对转矩和速度的精确控制。直接转矩控制 ( Direct Torque Control , DTC ):该方法不需要复杂的坐标变换,而是通过直接测量和控制电机的电磁转矩和定子磁链来实现控制目标。这里以矢量控制策略中的电流环控制为例,对驱动电机的控制流程总结为如下步骤: 1. 电机转子位置和速度测量
1. 电机转子位置和速度测量
MCU 通过 安装在电机轴的一端或集成在电机内部,并通过联轴器与电机轴连接,以确保它们可同轴旋转的 旋转编码器处获取 电机 转子 的 位置和速度信息 。
旋转编码器主要有类型:绝对式编码器和增量式编码器。以增量式编码器的应用为例,它通常由 A 、 B 两路相位相差 90° 的脉冲序列组成,同时通过 Z 相脉冲标记参考位置,通常称为零位或原点信号。
当电机转动时, A 相和 B 相会交替输出方波脉冲,此时 MCU 可通过对比两相之间 90 °的相位差关系来判断电机的旋转方向,并通过记录脉冲的数量、单位时间内脉冲数量的变化量来确定电机转过的角度或距离以及计算出电机的转速,通过得到的转子位置及速度信息, MCU 可进行进一步的如电流环或速度环的控制。
如当电机旋转一定角度时,编码器会产生相应的脉冲数,通过比较 A 相和 B 相脉冲的先后顺序来判断电机的旋转方向,并根据单位时间内脉冲的数量来计算速度。假设 MCU 在 1s 时长接收到 10000 个脉冲,且编码器每圈只会产生 1000 个脉冲,那么此时电机的转速则为 10rpm/s (电机转速ω)。
编码器每运转一圈会产生一个 Z 相脉冲,当 MCU 首次接收到 Z 相脉冲时,会将这个位置作为零位参考点,随后可通过计数 A 相脉冲的数量来确定电机转子相对于零位的位置。如检测到了 300 个 A 相脉冲,那么电机转子相对于零位的角度位置将是 300/1000 圈或 108° (转为弧度 θ=3 π /5 )。
2. 三相电流测量通过电流传感器测量电机每相的电流值,接着将所测得的三相电流值通过 αβ 变换( Clarke 变换),将其从三相静止坐标系变换到两相静止坐标系( I α , I β )中。在 三相对称系统 中, 三个相电流之和 理论 为零 ,即 I a + I b + I c = 0 ,此时 Clarke 变换公式可被简化为如下形式: 图 1 简化 Clarke 变换公式如果三个相电流之和为零的条件不成立,则需要使用完整的 Clarke 变换公式来进行转换,以能够处理任意的三相输入电流,此时通用的 Clarke 变换公式如下:
图 1 简化 Clarke 变换公式如果三个相电流之和为零的条件不成立,则需要使用完整的 Clarke 变换公式来进行转换,以能够处理任意的三相输入电流,此时通用的 Clarke 变换公式如下: 图2 通用Clarke变换公式然后使用转子位置信息通过 Park 变换,将两相静止坐标系下的电流转换到旋转坐标系下,从而得到 d 轴(直轴)和 q 轴(交轴)电流即 I d 和 I q 。
图2 通用Clarke变换公式然后使用转子位置信息通过 Park 变换,将两相静止坐标系下的电流转换到旋转坐标系下,从而得到 d 轴(直轴)和 q 轴(交轴)电流即 I d 和 I q 。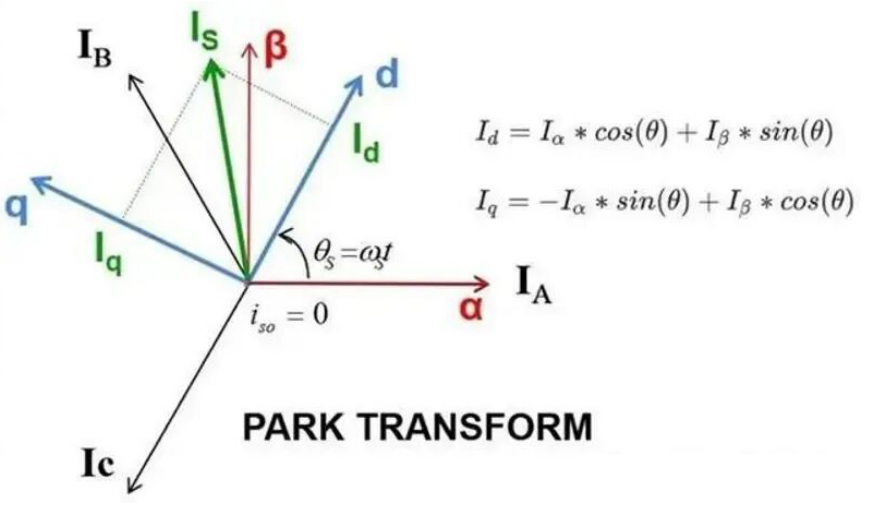 图3 Park变换公式注: dq 坐标系是一个随电机转子旋转而旋转的坐标系,其中 d 轴(直轴)与转子磁链方向一致, q 轴(交轴)与 d 轴相差 90 度。
图3 Park变换公式注: dq 坐标系是一个随电机转子旋转而旋转的坐标系,其中 d 轴(直轴)与转子磁链方向一致, q 轴(交轴)与 d 轴相差 90 度。
3. 期望电流转换
根据整车的实时工况,系统将向 MCU 发送功率请求, MCU 将此功率需求分解为电机的扭矩与转速需求,并通过电机数学模型计算期望的 d 轴和 q 轴电流, 此期望电流在外环即速度环中可通过基于转速差的控制模型计算输出,并通过向量表示为: u(t)=I 目标 =[I d, 目标 , I q, 目标 ] T 。
通常情况下, d 轴电流主要用于控制电机的励磁磁场,但对于永磁同步电机而言,励磁磁场由永磁体提供,因此并不需要额外的励磁电流,所以当电机处于中低速运行时 d 轴电流常被设置为 0 或一个很小的值,以降低损耗,此时可将期望的 q 轴电流等价于速度环输出值。
随着电机进入高速运行区间,由于反电动势的存在,将需要对 d 轴电流进行控制,以扩大电机的转速范围。此时期望的 d 轴电流会以一个非线性的方式下降,如 a ω 2 +bω+c,而期望的 q 轴电流需根据整车要维持的扭矩需求进行确定。
在电机控制中,扭矩( T )与电机的 q 轴电流( I q )直接相关,其关系为: T=k T *I q 。
其中, k T 是电机的转矩常数,其与电机的结构相关。
如在整车运行时的某一时刻,系统分解需求后得到此时电机 需要 输出 10N.m 的扭矩,并保持一定的速度。若电机的转矩常数 k T = 2N.m/A ,此时根据公式可得 期望的 q 轴电流 : I q =T/ k T =10/2=5A ,此时期望的 I d =0A 或根据弱磁需要以非线性方式表示。
在双闭环控制系统中, 扭矩控制通常是内部电流环的一部分 ,当系统需要 输出特定 的扭矩时,可以直接通过公式计算出对应的 q 轴电流,然后将其作为电流环的目标值。如上述示例中,此时扭矩需求是已知的,这在实际应用中如车辆处于爬坡、加速等工况下时,系统更需要扭矩特性,因此,此时可绕过速度环基于转速差的计算方式而通过公式直接计算目标 I q 。
4. 电流误差计算
通过由电流传感器测得的三相电流转换而来的 I d 和 I q 值与通过转速及扭矩需求转换而来的 I d 和 I q 值(这里为区分记作 I d’ 和 I q’ )进行比较,得到误差信号,即 E_I d = I d’ -I d , E_I q = I q’ -I q 。
如通过电流传感器测得三相电流 I a = 10A, Ib = -5A, Ic = -5A,并此时转子相对于零位的角度为 108°,那么通过 Clarke和 Park变换得到 d-q坐标系下的实际电流 Id = -3.09A, Iq = -9.51A。同时系统所需的扭矩为 10N.m,电机的转矩常数为 2N.m/A。那么通过计算可得此时 d轴、 q轴的电流误差是: E_Id = Id’ -Id =0-( -3.09A) =3.09A, E_Iq = Iq’ -Iq =5-(-9.51)=14.51A 。
此假设情况下,计算出的误差较大,正常情况下需求电流与实际电流的误差应尽可能接近于 0 。
5. 电流调节
基于所得到的电流误差信号, MCU 通过如 PID 、滑膜控制等控制算法输出的控制信号 u d 和 u q (直轴电压与交轴电压),该控制信号经坐标反变换后,从旋转坐标系回到静止坐标系,从而生成相应的 PWM 控制信号, MCU 通过控制 PWM 的输出占空比来控制开关元件(如 IGBT )的导通和关断,进而调整电机绕组中的电流大小,使之符合电流环的目标值也就是由速度环得到的目标值,以确保电机可按照期望的方式运行。
综上所述,简单描述了在新能源汽车中 MCU 基于矢量控制通过电流环实现对驱动电机的扭矩和转速控制的基本原理,但在具体应用中,系统还需要考虑如滤波、噪声抑制、实时性要求等。 尽管很难确定每种电动汽车(EV)的牵引逆变器使用哪种调制策略,但人们普遍认为由于其性能优势,空间矢量脉宽调制(SVPWM)更受青睐,它允许过调制以减弱正弦波的顶部,以便可以施加高于直流母线电压的电压,并通过电机驱动更大的电流。这个方案还最小化了逆变器中的六个开关的开关转换,从而降低了开关损耗并提高了效率。电机控制器硬件电路
尽管很难确定每种电动汽车(EV)的牵引逆变器使用哪种调制策略,但人们普遍认为由于其性能优势,空间矢量脉宽调制(SVPWM)更受青睐,它允许过调制以减弱正弦波的顶部,以便可以施加高于直流母线电压的电压,并通过电机驱动更大的电流。这个方案还最小化了逆变器中的六个开关的开关转换,从而降低了开关损耗并提高了效率。电机控制器硬件电路
信号采集:电机端的电流和位置信号是电机控制的基础。电流信号通常由集成在电机控制器内部的电流传感器采集,而位置信号则由旋变传感器提供,这些传感器能够精确测量电机转子的位置和速度。
控制电路:控制电路是电机控制器的中枢,它负责处理采集到的信号,并通过软件算法生成PWM波形来驱动逆变器。控制电路通常包括微控制器或数字信号处理器(DSP),以及相关的支持电路。
电平转换:由于微控制器的输出电平可能与驱动电路的逻辑电平不匹配,因此需要电平转换电路来确保PWM信号能够正确地驱动功率模块。
逆变器驱动:PWM波形直接驱动三相全桥逆变器中的功率模块,这些功率模块负责将直流电转换为交流电,以供给电机。逆变器的驱动信号需要精确和快速,以确保电机的高效运行。
环路构成:从信号采集到控制算法的实现,再到控制电路的结构,整个系统构成了一个紧密的环路,确保了系统的稳定性和响应速度。
CAN通讯模块:电机控制器通过CAN通讯模块接收来自整车控制模块或域控制器的指令,这些指令用于控制电机的输出扭矩和运行状态。
低压接口:低压接口是电机控制器中的一个物理实体,它连接整车小电瓶和CAN通讯回路,负责信号和能量的传输,并为电机控制器板子供电。
电源模块:电源模块负责为控制器上不同电压要求的芯片和控制模块提供稳定的供电。例如,微控制器可能需要3.3V或5V的IO电平,内核电压可能是1.3V,而驱动电路可能是5V电平,信号采集电路如旋变模块可能是12V。
电机与控制器的连接:电机与电机控制器之间的连接通常包括三相铜排,用于传输三相交流电,以及旋变传感器的接口,用于提供电机的位置和速度信息。
电流传感器集成:电流传感器通常集成在电机控制器内部,采用霍尔效应原理或空心穿孔式设计,以非侵入性的方式测量电机的电流。
旋变传感器:速度和位置的检测通常依赖于旋变传感器,它能够提供电机转子的位置信息,这对于实现精确的矢量控制至关重要。
通过这些硬件组件的设计和集成,电机控制器能够实现对电动汽车电机的精确控制,同时确保系统的安全性和可靠性。这些组件的协同工作体现了电机控制器在现代电动汽车动力系统中的核心作用
电机控制器PCB板
电阻器 Resistors
电阻器负责在电流通过印刷电路板时,通过抵抗电流流动来散发热量。电阻器有不同的尺寸和类型,这些尺寸和类型基于不同的材料和电阻值。
电容器Capacitors
电容器负责储存电能,并在电路需要更多电能时释放它。它在导电层之间通过介电或绝缘屏障收集相反的电荷。

电感器 Inductors
这是一个线性被动组件,当电流通过它们时,它们以磁场的形式储存能量。最简单的电感器类型是线圈,随着线圈数量的增加,其磁场也会增强。
电位器 Potentiometers
这是一种可变电阻器,有线性和旋转两种可变类型。
变压器 Transformer
变压器有助于将电力从PCB的一个电路转移到另一个电路。它将电流从PCB的一个电路转移到另一个电路,并在转移过程中降低或增加电压。
二极管 Diodes
二极管允许电流在特定方向上通过它们一次。电流将从二极管的阴极流向阳极,单向流动。
晶体管 Transistors
晶体管是电子开关和放大器的一种类型,有双极晶体管等不同类型。你可以根据逆变器PCB的应用将晶体管分为不同的类别。
集成电路 Integrated Circuits
这些是在半导体材料和晶片上缩小的电路和组件。集成电路通常作为控制逆变器PCB几乎所有应用的主要“大脑”。
晶体振荡器 Crystal Oscillators
晶体振荡器在需要稳定和精确元件的不同电路中充当主时钟。它们通过使压电材料产生振荡来产生周期性的电子信号。
继电器和开关 Relays and Switches
开关是一种电源按钮,你将用它来控制电流或功率通过逆变器的流动。继电器是一种电磁开关,你将使用螺线管来操作,当电流流过时,螺线管会暂时变成磁性。
传感器 Sensors
传感器有助于检测环境条件的变化,然后响应环境变化产生变化。它有助于将不同物理现象中的能量转换为电子能量。
将这些元器件按照有源和无源组件进行分类:

在电子电路和功率转换器中,有源组件和无源组件是构成电路的两大基本元素,它们各自具有独特的特性和功能:

有源组件(Active Components):
有源组件是指那些在操作中需要外部电源或能量源的组件。它们能够控制电流或电压,甚至放大信号。有源组件通常包含半导体材料,并且可以在电路中执行复杂的功能。

无源组件(Passive Components):无源组件不需要外部电源来执行其功能。它们主要用于在电路中储存能量、调节电流或电压,以及过滤信号。无源组件仅利用通过它们的电流或电压来工作。在功率转换器的设计中,有源组件负责控制和转换功率,而无源组件则负责维持电路的稳定性和提高效率。两者的结合使得复杂的电力管理成为可能逆变器PCB的主要功能是通过将直流电转换为交流电,从而产生不间断的交流电流。在交流电源可用的情况下,逆变器PCB工作情况的描述。一旦逆变器PCB感应到交流电的存在,电流将流向电池充电部分。传感器将激活一个继电器,该继电器会将交流主电源传递到输出插座。 借助线路电压的帮助,交流电将被逆变为直流电,负责为电池充电。它有传感器可以判断电池何时充满电,这会触发逆变器PCB停止充电。还有一些特定的逆变器PCB带有涓流充电电路,这可以保持电池在满充电容量。
电机控制器技术趋势电机控制器行业的未来发展趋势包括硅基IGBT向碳化硅MOS的迭代,以及集成化产品的开发,旨在提高功率密度和冷却性能,同时降低电驱动系统的成本。
作为电机控制器的核心组件,IGBT模块约占总成本的45%。与基于硅的IGBT功率器件相比,SiC功率器件具有体积更小、重量更轻、功率密度更高、续航里程更长、控制器损耗更少、热导率更好以及耐高温等优势。因此,以德尔福和比亚迪为代表的供应商已开始部署SiC电机控制器,预计未来将取代IGBT。
在未来,电机控制器行业将继续追求技术创新和性能提升。硅基IGBT向碳化硅MOS的迭代,不仅能够提高功率密度和冷却性能,还有助于降低电驱动系统的成本。这将进一步推动新能源汽车行业的发展,提升电动汽车的性能和经济效益。
对于SiC(碳化硅)电机控制器而言,充分利用SiC MOSFET器件的高温耐受性、高效率和高频特性是进一步提升功率密度和效率的关键。SiC MOSFET逆变器被批量应用于量产车型,包括比亚迪、丰田、特斯拉等主机厂车型,Model 3的SiC电机控制器的如图:

Model 3的SiC电机控制器由24个并联的SiC MOSFET芯片组成,并安装在销钉式散热器上,以实现高电流输出(800Arms)。通过激光焊接工艺,每个SiC MOSFET都连接到铜母排上,这极大地提高了连接的可靠性。
-
同步电机工作原理动画2023-05-25 2735
-
永磁同步电机工作原理及分类2023-03-14 1071
-
永磁同步电机工作原理是什么2023-03-01 6186
-
直驱电机的工作原理2023-02-28 47561
-
高效节能电机与变频节能电机工作原理2023-01-02 2858
-
无刷直流电机工作原理及PWM调速2021-09-15 3853
-
永磁同步电机工作原理(pwm控制)2021-05-19 2934
-
滑环电机工作原理与常见故障2020-01-17 20027
-
永磁变频电机工作原理2019-07-16 30278
-
直流无刷电机工作原理2017-01-21 1473
-
汽车发电机工作原理2010-05-28 50134
-
感应子式步进电机工作原理2010-01-09 2520
-
交流发电机工作原理图2008-07-18 40586
-
步进电机工作原理与编程方法和控制源程序2008-05-22 1894
全部0条评论

快来发表一下你的评论吧 !
