

伯克利那个会“18般武艺”的DeepMimic模型开源了!
电子说
描述
还记得今年4月伯克利BAIR实验室发布的那个会“18般武艺”的DeepMimic模型吗?他们使用强化学习技术,用动作捕捉片段训练模型,教会了AI智能体完成24种动作,走路、跑步就不用说了,还包括翻跟斗、侧翻跳、投球、高踢腿等等高能动作。
体会一下:
回旋踢
跑步
投球
训练每一种动作都需要动作捕捉和深度强化学习,而BAIR的研究者创造了一个全新的系统,教会agent完成复杂、逼真的动作任务。
作者Xue Bin Peng等人将这个系统命名为DeepMimic,比已有工作更进一步的是,他们的目标是在训练一个agent完成特定任务的前提下,使它的动作更贴近真实。他们的论文发表在SIGGRAPH 2018。
除了人形机器人外,他们还训练了Atlas机器人、暴龙、龙等形态的agent。
Atlas机器人
整个DeepMimic所需要的input分为三部分:一个被称为Character的Agent模型;希望Agent学习的参考动作(reference motion);希望Agent完成的任务(task)所定义的reward function。
训练之后会得到一个可以控制Agent同时满足与参考动作相似且可以完成任务的控制器。
四种翻滚动作
现在,DeepMimic的代码、数据和训练策略已经全部开源,感兴趣的读者不妨试试拿来训练自己的“功夫小子”。
开源代码
SIGGRAPH 2018论文:“DeepMimic: Example-Guided Deep Reinforcement Learning of Physics-Based Character Skills”的代码。这个框架使用强化学习来训练一个模拟人形智能体来模仿来自mocap数据的各种运动技能。
项目页面:
https://xbpeng.github.io/projects/DeepMimic/index.html
C++:
Bullet 2.87 (https://github.com/bulletphysics/bullet3/releases)
Eigen (http://www.eigen.tuxfamily.org/index.php?title=Main_Page)
OpenGL >= 3.2
freeglut (http://freeglut.sourceforge.net/)
glew (http://glew.sourceforge.net/)
Python:
PyOpenGL (http://pyopengl.sourceforge.net/)
Tensorflow (https://www.tensorflow.org/)
MPI4Py (https://mpi4py.readthedocs.io/en/stable/install.html)
Misc:
SWIG (http://www.swig.org/)
MPI
Windows: https://docs.microsoft.com/en-us/message-passing-interface/microsoft-mpi
Linux: sudo apt install libopenmpi-dev
Build
模拟环境是用C++编写的,python包装器使用SWIG构建。要安装python依赖项,请运行
pip install -r requirements.txt
请注意,必须在MPI4Py之前安装MPI。
Windows
wrapper使用DeepMimicCore.sln构建。
1. 从配置管理器中选择x64配置。
2. 在DeepMimicCore的项目属性下,修改要包含的其他包含目录
Bullet源目录
Eigen包括目录
python包含目录
3. 修改要指定的其他库目录
Bullet lib目录
python lib目录
使用Release_Swig配置构建DeepMimicCore项目,这应该在DeepMimicCore/. 中生成DeepMimicCore.py。
Linux
1. 通过指定以下内容修改DeepMimicCore中的Makefile,
EIGEN_DIR:Eigen包含目录
BULLET_INC_DIR:Bullet源目录
PYTHON_INC:python包含目录
PYTHON_LIB:python lib目录
2. 建立wrapper,
make python
这应该在DeepMimicCore/中生成DeepMimicCore.py
如何使用
一旦构建了python wrapper,就可以使用Tensorflow完全在python中完成训练。DeepMimic.py运行用于查看模拟的可视化工具。使用mpi_run.py完成训练,它使用MPI在多个进程之间并行训练。
通过指定提供场景配置的参数文件来运行DeepMimic.py。例如,
python DeepMimic.py --arg_file args/run_humanoid3d_spinkick_args.txt
将为“回旋踢”运行一个预训练的policy。同样的,
python DeepMimic.py --arg_file args/kin_char_args.txt
将加载并播放mocap片段。
要训练一个策略(policy),请通过指定参数文件和工作进程数来运行mpi_run.py。例如,
python mpi_run.py --arg_file args/train_humanoid3d_spinkick_args.txt --num_workers 4
将训练一个策略,使用4个workers进行“回旋踢”。作为训练方案,它会定期打印统计数据并将其记录到output/,以及最新策略的.ckpt。通常需要大约6千万个样本来训练一个策略,而训练16个workers需要一天时间。16个workers可能是框架所能支持的最大workers数量。
args中已经为不同的技能提供了许多参数文件。train_ [something] _args.txt文件是为mpi_run.py设置的,用于训练策略,并为DeepMimic.py设置run_ [something] _args.txt文件以运行其中一个预训练策略。要运行自己的策略,请使用run_ [something] _args.txt的文件之一,并指定要使用--model_file运行的策略。确保引用的动作--motion_file对应于策略所训练的动作,否则策略将无法正常运行。
接口
右上角的图显示了价值函数的预测
单击右键并拖动将平移相机
单击左键并拖动将对特定位置处的角色施加力
滚轮会放大/缩小
按“r”将重置该episode
按'l'将重新加载参数文件并重建所有内容
按'x'将使用随机的框投向角色
按空格将暂停/恢复模拟
按’>'将逐步执行模拟
Mocap Data
Mocap clips位于data/motions/中。要播放剪辑,首先修改args/kin_char_args.txt并指定要使用的文件--motion_file,然后运行
python DeepMimic.py --arg_file args/kin_char_args.txt
动作文件遵循JSON格式。“Loop”字段指定运动是否是循环的。“wrap”指定一个循环运动,该循环将在结束时回到起始点,而“none”指定一旦运动结束就会停止的非循环运动。“Frames”列表中的每个向量指定运动中的关键帧。每个框架具有以下格式:
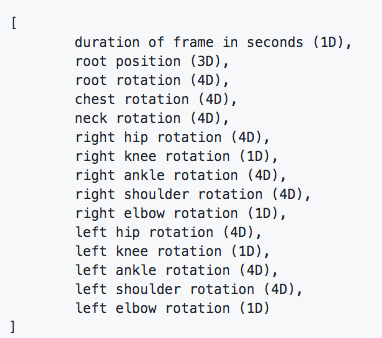
位置以米为单位指定,球面关节的3D旋转指定为四元数(w,x,y,z),转动关节(例如膝关节和肘关节)的1维旋转用弧度的标量表示。根位置和旋转在世界坐标中,但所有其他关节旋转都在关节的局部坐标中。要使用你自己的动作剪辑,请将其转换为类似格式的JSON文件。
-
UC伯克利教授Stuart Russell:人工智能基础概念与34个误区2018-07-04 6189
-
伯克利博士论文:DC-DC转换器2011-09-29 913
-
美国劳伦斯伯克利国家实验室开发出“病毒发电”元件2012-05-16 5068
-
美国加州大学伯克利分校模电资料2015-10-28 1174
-
伯克利(Berkeley)联网程序代码介绍2016-05-09 1397
-
美伯克利分校和韩国KAIST先后公布柔性传感器据说能检测血氧2018-11-24 4660
-
推特公开宣布了伯克利机器人学习实验室最新开发的机器人BLUE2019-04-13 5035
-
UC伯克利新机器人成果:灵活自由地使用工具2019-04-15 2964
-
机器人遭绑架?一男子看不惯在伯克利街道上漫游的送货机器人2019-05-07 3135
-
伯克利单腿跳机器人迎来新升级 即将在ICRA2019会议上亮相2019-05-23 3373
-
加州大学伯克利分校的团队给予跳跃机器人更高目标2019-06-13 3924
-
清华、伯克利联手打造 成立RISC-V国际实验室2019-06-16 4116
-
图灵奖得主牵头推动芯片开源 清华伯克利成立RISC-V国际实验室2019-06-17 5022
-
加州大学伯克利分校研发可以操控的机器人2019-08-05 1182
-
美国伯克利市考虑2027年出台汽油车禁售令2021-01-19 1830
全部0条评论

快来发表一下你的评论吧 !
