

介绍驾驶辅助技术的一些常见功能
汽车电子
描述
根据工业和信息化部、公安部、交通运输部等三部委共同发布的《智能网联汽车道路测试管理规范(试行)》,自动驾驶汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与人、车、路、云端等智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终可实现替代人来操作的新一代汽车。
高级驾驶辅助系统是实现自动驾驶的重要基础,本文就驾驶辅助技术的一些常见功能进行介绍。
01自适应巡航控制
自适应巡航控制(ACC)是一种高级驾驶辅助系统,该系统通过距离传感器实时测量与前车的距离和相对速度,计算出合适的油门或刹车控制量并进行自动调节,从而实现本车的车速控制以及与前车的车距控制。在无前车的情况下,ACC系统将根据预设的行驶速度,通过控制发动机油门开度保持定速行驶。
ACC系统在机动车车速为40-160公里/小时的范围内起作用,其最大的刹车减速度约为0.5g。近年来,针对城市交通中机动车低速行驶和频繁起停等情况,ACC系统功能现已包括起停控制、避撞控制等。
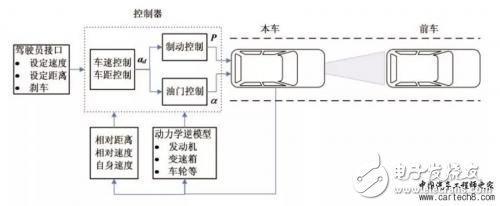
图1 机动车自适应巡航控制原理
机动车全速度范围内的自适应巡航控制可以看成是一类存在内部动力学模型不确定性和外部环境干扰的非线性系统的最优跟踪控制问题,近年来引起了国内外研究者的广泛关注。PID方法、模糊逻辑、模型预测控制、滑模控制、神经网络、最优控制等控制理论方法都被应用于ACC系统控制器的设计中。
02自动泊车
自动泊车系统主要由感知单元、中央控制器、转向执行机构和人-机交互系统组成。
★感知单元通过车位检测传感器、避障保护传感器、轮速传感器、陀螺仪、档位传感器等单元实现对环境信息和机动车自身运动状态的感知,泊车系统的中央控制单元需要在感知信息已知的前提下对机动车进行运动控制;
★中央控制单元主要分析处理感知单元获取的环境信息以及机动车泊车运动控制。在泊车过程中,泊车系统控制器实时接收并处理机动车避障传感器输出的信息,当机动车与周围物体相对距离小于设定安全值时,泊车系统控制器将采取合理的机动车运动控制;
★转向执行机构由转向系统、转向驱动电机、转向电机控制器、转向柱转角传感器等单元组成,转向执行机构接收中央控制单元发出的转向指令后执行转向操作。
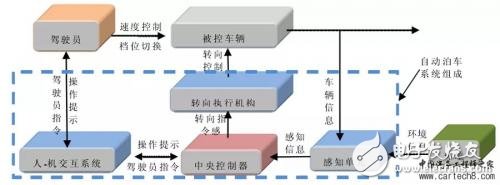
图2 自动泊车系统结构组成示意图
03电子稳定控制
电子稳定控制(ESC),又称为电子稳定程序(ESP)或动态稳定控制(DSC),是一种检测并抑制机动车轮胎附着力降低的计算机技术。当ESC系统检测到机动车车轮失去控制时将自动制动,且这种制动是针对特定车轮单独进行。例如当机动车转向过度时,外侧前轮将被制动;而机动车转向不足时,内侧后轮将被制动。某些ESC系统还会限制发动机功率直至重新稳定控制机动车。
运行过程中,ESC系统会持续监控转向装置和机动车行驶方向,实时比较驾驶人期望的转向角度(根据方向盘角度确定)和机动车实际行驶方向(根据测量的机动车横向加速度、车身倾角和各车轮速度计算)的差异。当机动车前进方向和驾驶人期望方向不同时,ESC系统则开始发挥作用。ESC系统首先会对机动车打滑的方向进行评估,然后进行不对称的车轮制动,对机动车切向产生扭矩,从而抵消滑动的影响并将机动车重新带回驾驶人要求的行驶方向。
ESC系统可以在任何路面上起作用,包括碎石道路和冰面。和人为控制相比,ESC系统对打滑具有更快的反应速度和更有效的纠正能力,甚至在驾驶人尚未意识到控制力减弱的情况下ESC系统就已经开始发挥作用。
04车道偏离警示
车道偏离警示系统的主要功能是在机动车将要驶出车道时警示驾驶人,能够减少因驾驶人失误、分心以及疲劳引起的交通事故,该系统一般在高速公路或快速路上发挥作用。
车道偏离警示系统主要有两类:一是车道偏离报警系统(LDW),当机动车偏离其车道时,系统将通过视、听觉或者震动进行警示;二是车道保持系统(LKS),车道偏离报警系统在警示驾驶人后,若驾驶人没有作出相应操作,车道保持系统将自动采取措施保证机动车行驶在车道内。当驾驶人在变道前主动给出转向信号时,系统将不起作用。
车道偏离警示系统采用视觉传感器(摄像头)、激光传感器和红外传感器。在软件核心算法上,车道偏离警示系统主要采用霍夫变换和边缘检测等图像处理方法来实时检测摄像头拍摄的道路视频中的车道线。
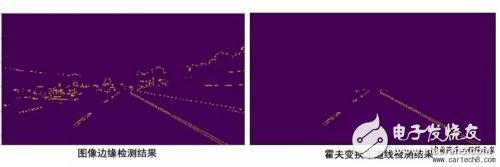
图3 车道线检测的图像处理方法
05碰撞避免
碰撞避免系统是一种减轻碰撞严重性的主动安全系统,又称为避撞系统、前向碰撞警示系统、碰撞减轻系统等。该系统使用微波雷达、激光雷达以及摄像头来检测碰撞先兆。一旦检测到危险,该系统将进行警示,若即将发生碰撞,系统将自动采取措施,如制动或变向等。按防撞对象分类,汽车碰撞避免系统可分为行人防撞系统和机动车防撞系统。
★行人防撞系统的核心技术是行人检测,行人检测常用的传感器包括可见光和红外光的视觉传感器,以及依靠波形反弹的反射传感器等。视觉传感器能够捕捉丰富的场景信息,但涉及庞大的识别计算量;雷达能够获得行人距离等准确信息,但分辨率往往有限,因此这两类传感器是互补的,通过融合可以达到鲁棒性更好的检测结果。
★机动车防撞系统最主要的判断依据是两车之间的相对距离和相对速度信息。按探测方向分类,机动车上使用的雷达可以分为倒车雷达和前向雷达。倒车雷达探测距离较短,一般使用超声波或红外探测两种方式;前向雷达由于车速快,要求探测距离长,一般使用激光雷达。
06自动编队
自动编队是通过电子或机械手段实现自动驾驶汽车自动组队,且车队内所有车辆间距缩小并同步实现加速或制动。基于这一概念,研究者们提出了高速公路智能交通自动化系统,在该系统内,自动驾驶汽车可以自主组成一个8至25辆车的车队。
在这一概念化的方案中,高速公路路面上已经铺设了由磁化的不锈钢钉组成的车道,自动驾驶汽车通过感知钢钉来计算车速并自我定位在车道中央。磁化的钢钉可以是磁北极朝上或者磁南极朝上,因此可以通过钢钉的磁性顺序来提供部分道路信息。在这种公路上,自动驾驶汽车通过自动转向和速度控制自动组织车队,车队内车辆间距减小后,行驶过程中空气阻力也将大大减小。针对卡车的自动编队研究表明牵引车使用自动编队功能可以减少能源消耗并提高电动牵引车的使用灵活性。
-
从先进驾驶辅助系统到无人驾驶2016-10-27 0
-
高级辅助驾驶ADAS技术2019-04-03 0
-
驾驶辅助技术的一些常见功能介绍2020-08-14 0
-
介绍一些常见的汇编语句2021-12-20 0
-
高级驾驶员辅助系统(ADAS)解决方案2022-11-14 0
-
驾驶辅助技术的一些常见功能进行介绍2018-07-23 6955
-
简要介绍高级辅助驾驶系统ADAS的专利技术2018-10-04 5269
-
关于汽车驾驶辅助技术的一些常见功能介绍2018-11-22 4538
-
Keil 一些常见文件类型的作用和功能说明2020-03-20 7920
-
一些误导用户的UPS指标或功能讲解2020-04-14 1094
-
关于C语言的一些特殊功能介绍2020-08-18 2471
-
介绍一些大功率IGBT模块应用中的一些技术2022-09-05 804
-
常见的辅助驾驶功能都有哪些2022-10-11 6757
-
一些智能电力电容器常见的功能2023-05-17 750
-
如何选择智能驾驶辅助系统2024-10-23 580
全部0条评论

快来发表一下你的评论吧 !
