

在RobotStudio中怎么自动打开TCP跟踪?
电子说
描述
在仿真机器人运动时候经常需要观察机器人运动轨迹,以便对运动轨迹的适合与否进行判断以往都是手动打开TCP轨迹,但是手动打开TCP轨迹又慢又切换不准确,这样路径复杂了以后就不利于观察,那么有没有一种方法可以随时用程序打开TCP跟踪呢?答案是有的但是要使用Smart组件下面就让我们一起来学习一下吧。
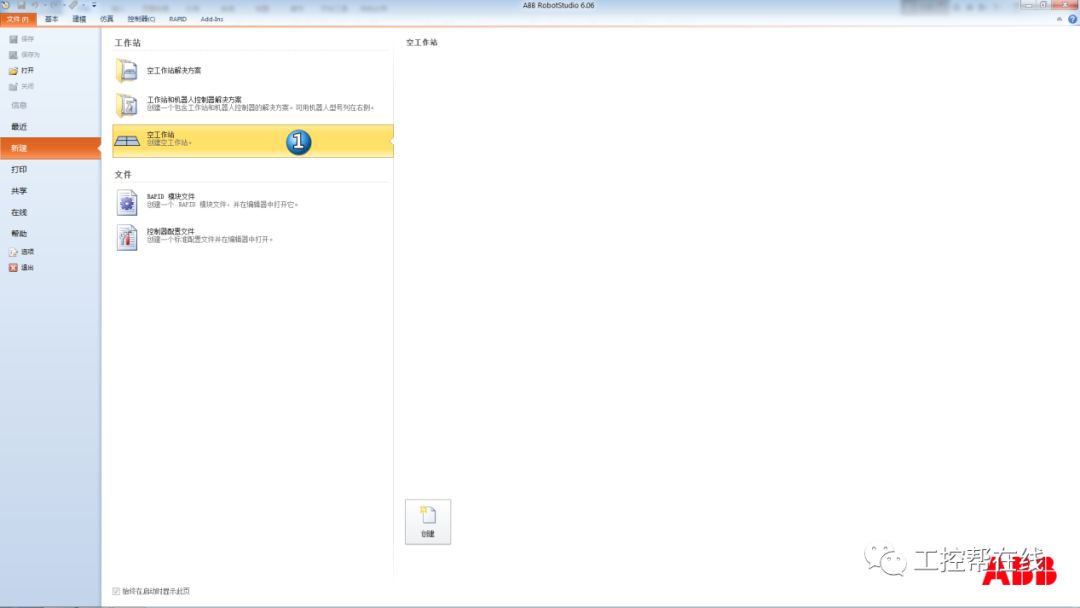
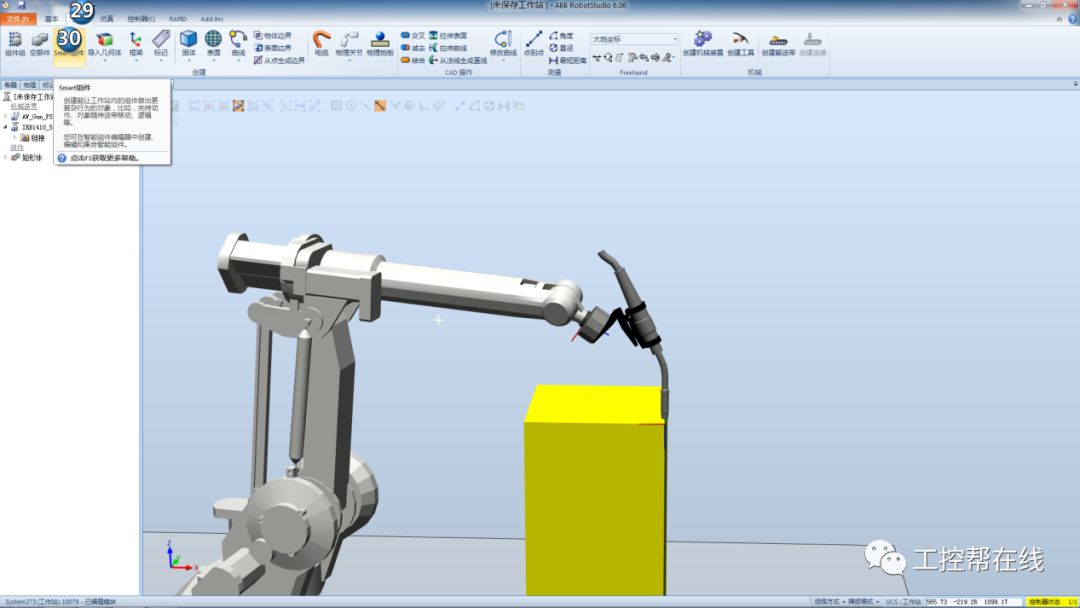
打开RobotStudio建立一个空工作站。
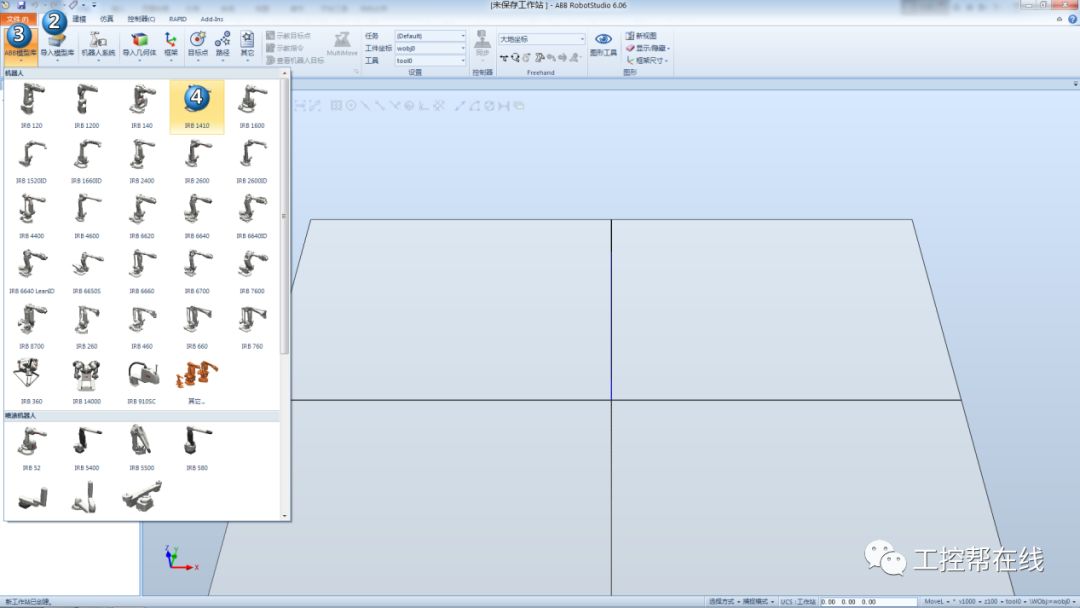
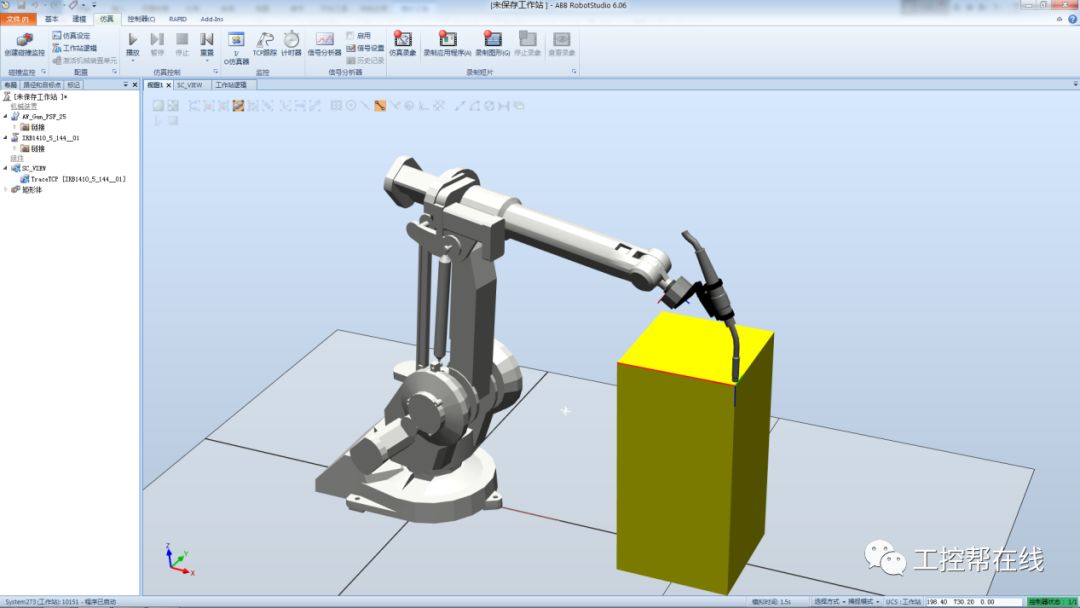
导入一台IRB1410机器人。
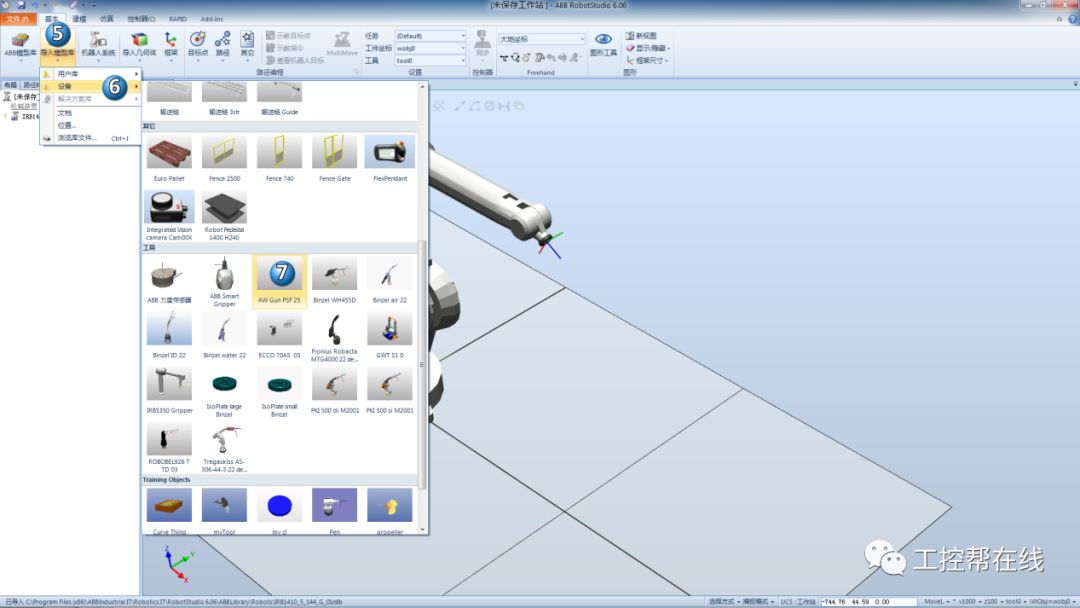
导入一把焊枪工具。
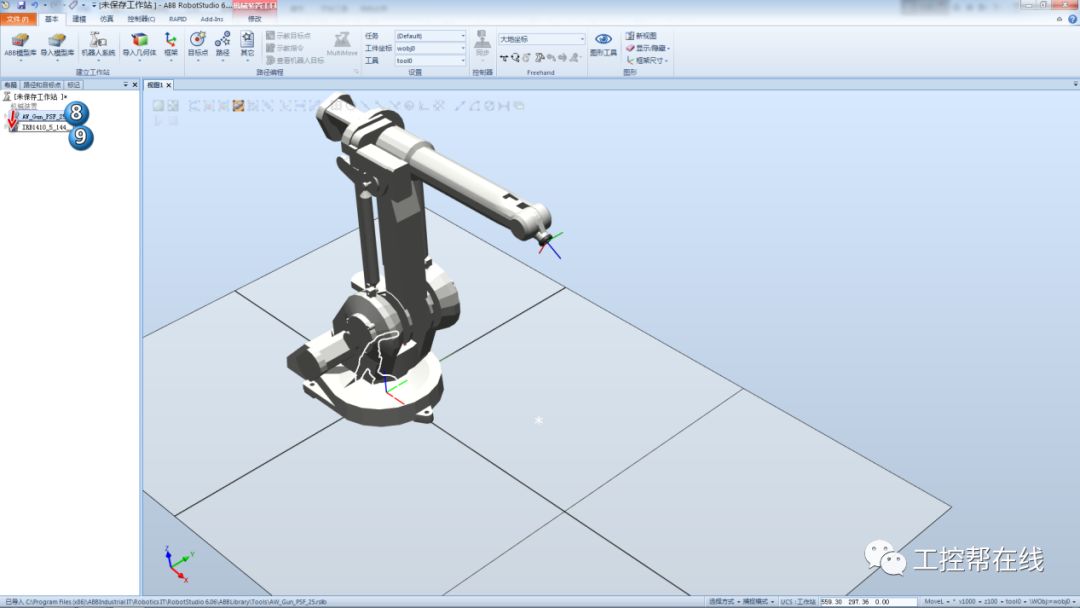
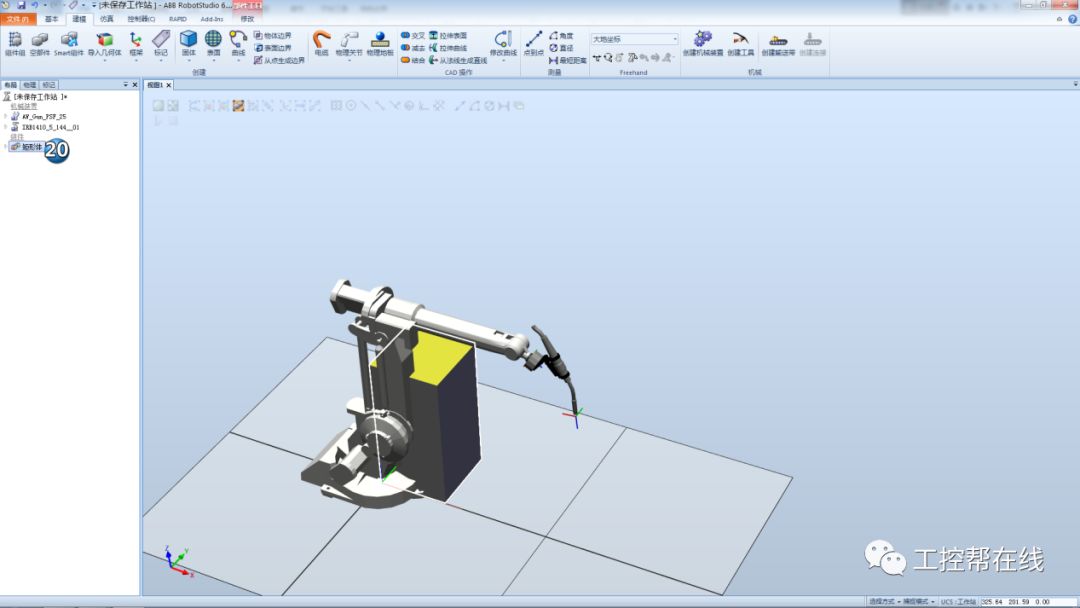
将其拖拽到机器人上,并更新位置。
进入建模选项卡,选择固体下的矩形体进行建模操作。
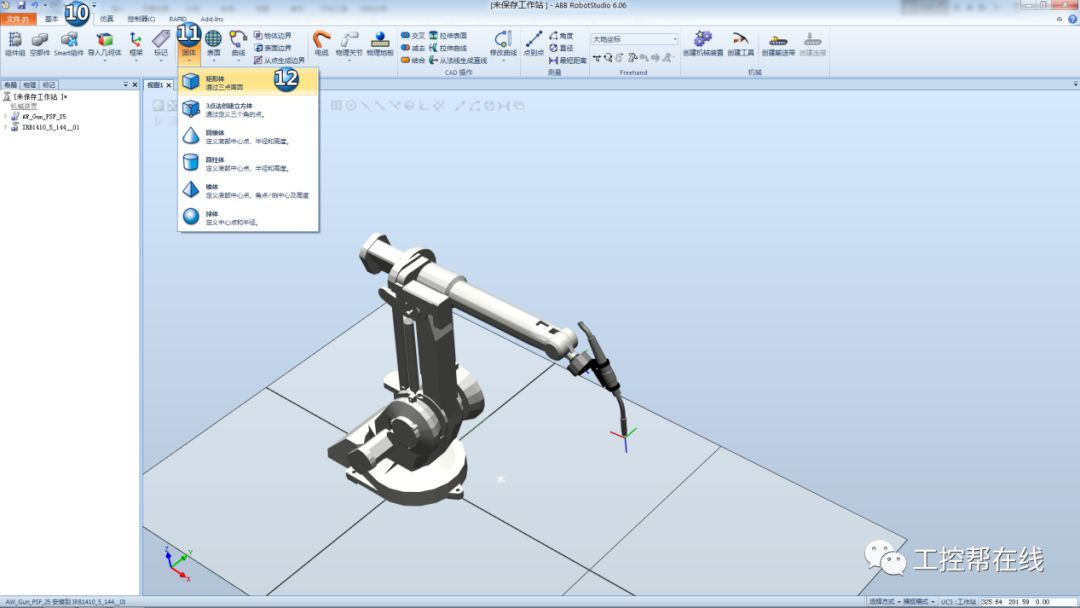
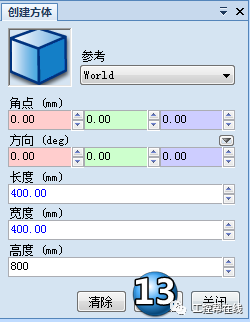
参数如下设定好了之后单击“创建”。
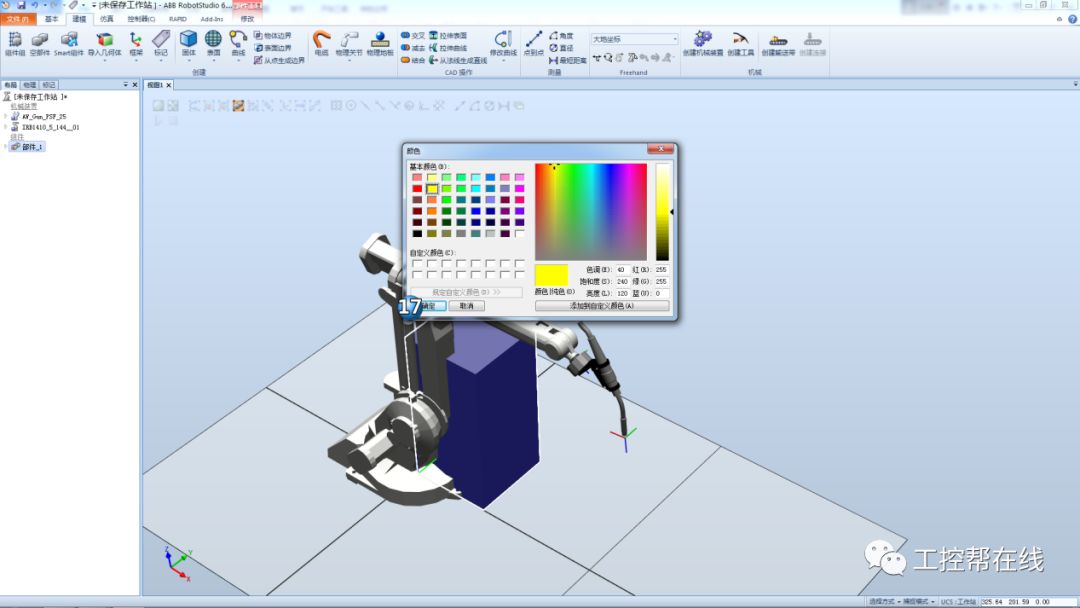
右键点击部件,修改-设定颜色,设定一个自己喜欢的颜色。
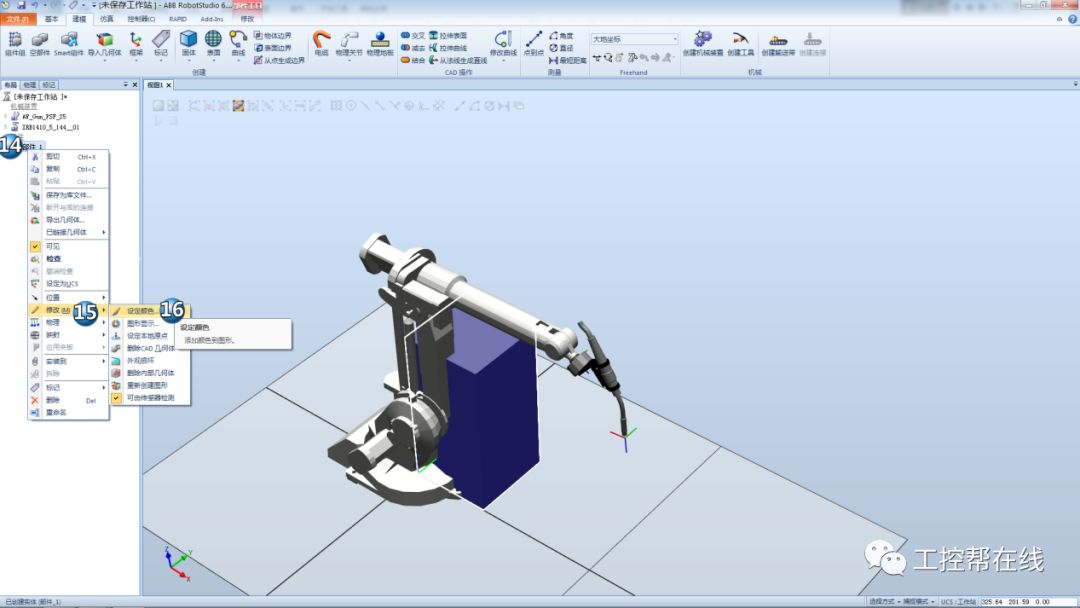
这里设定为黄色。
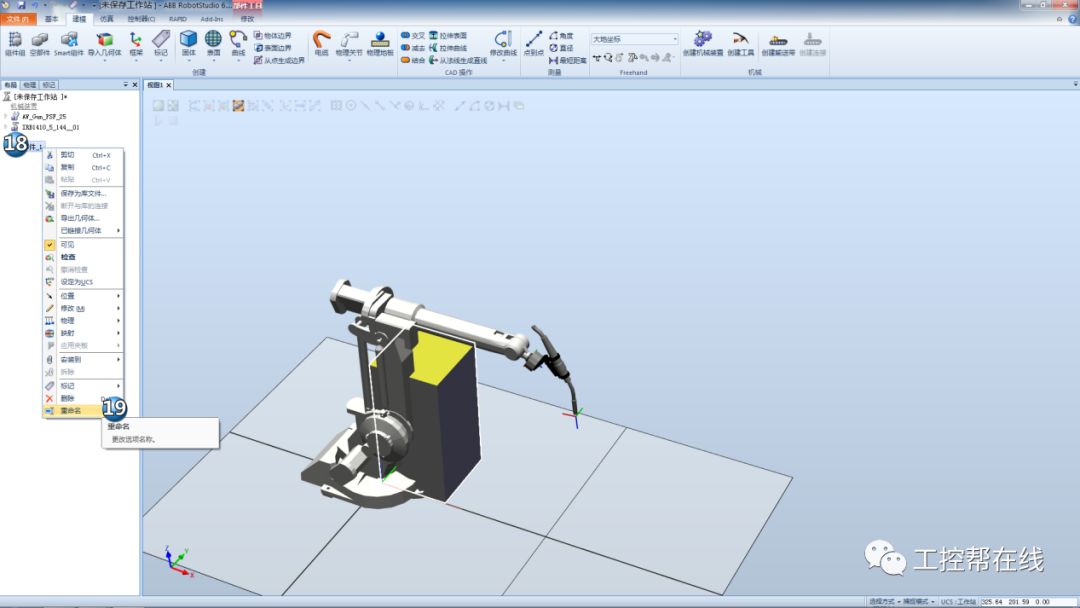
右键单击对其重命名。
重命名为矩形体。
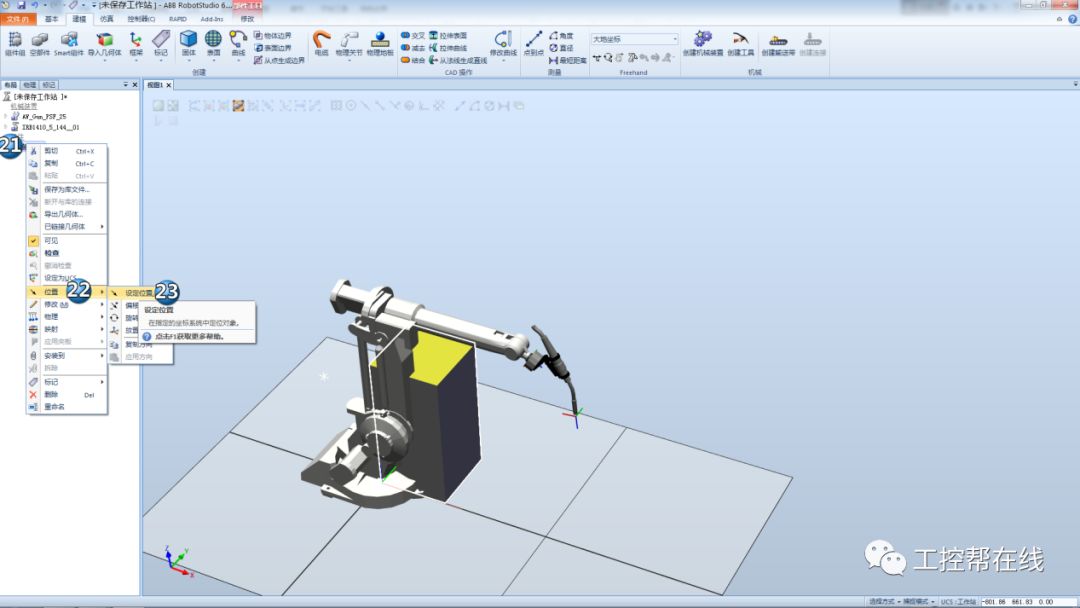
对其进行设定位置。
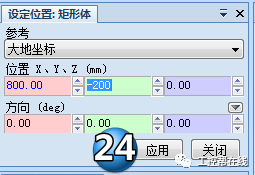
设定位置信息如下,设定完成后单击应用。
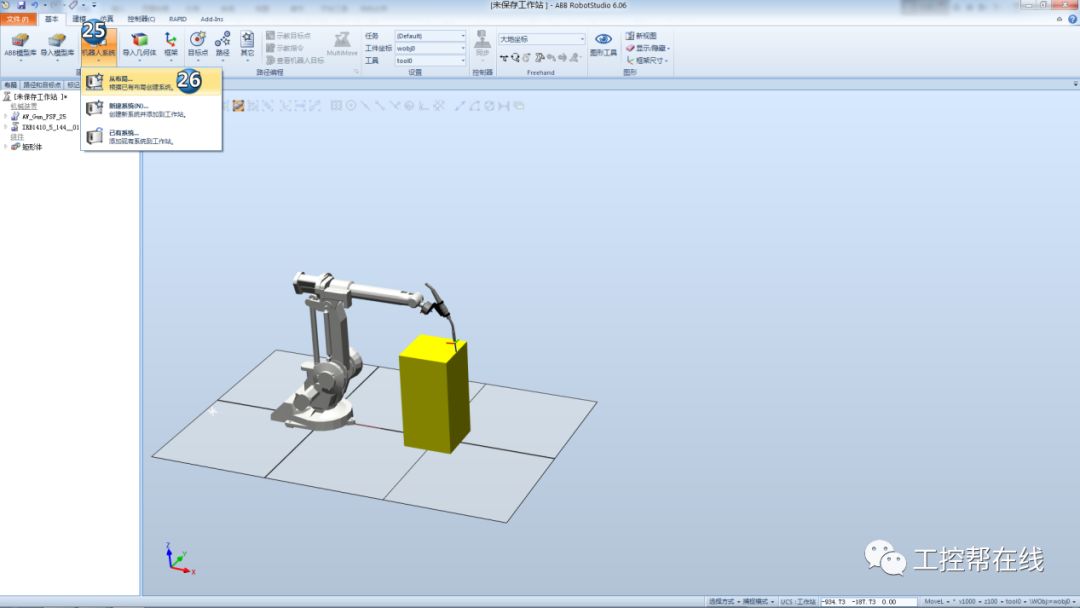
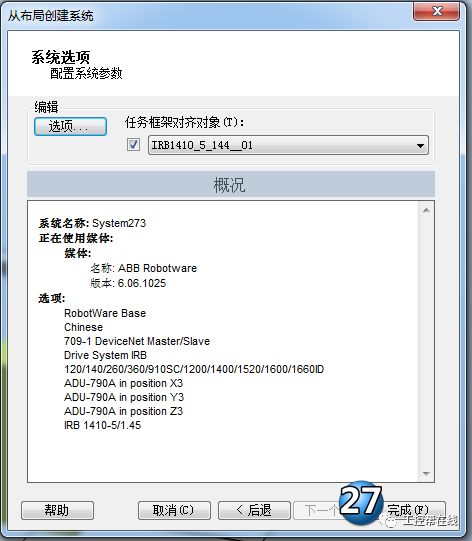
建立机器人系统。
将中文与709-1选项包勾选上,勾选完毕后点击完成。
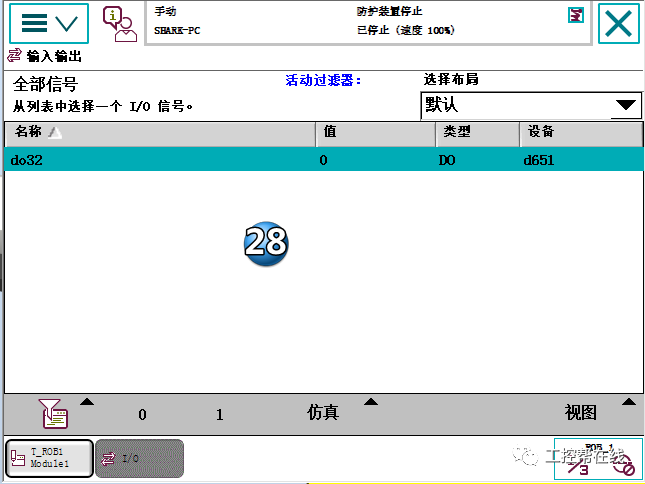
建立一个数字输出信号用于控制打开关闭TCP跟踪。
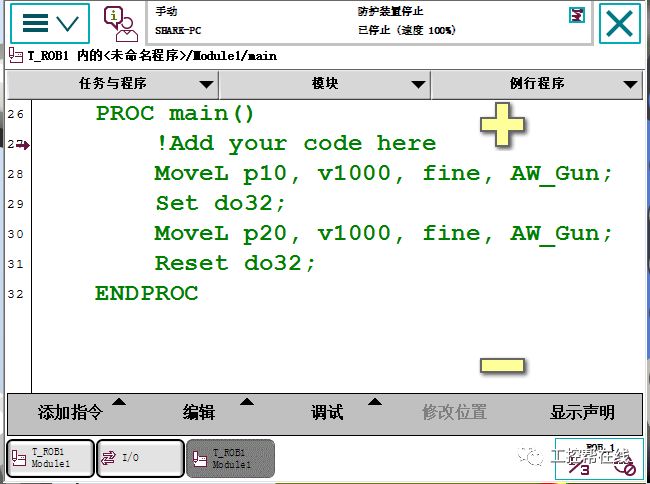
然后将画一条直线的程序写出来并在矩形体的一条上表面边线上示教(p10是起点p20是终点),Set与Reset是用于控制TCP跟踪的(最好使用同步过来的工具坐标系,不要使用默认工具坐标系)。
切换到建模选项卡,建立Smart组件。
右键对其重命名。
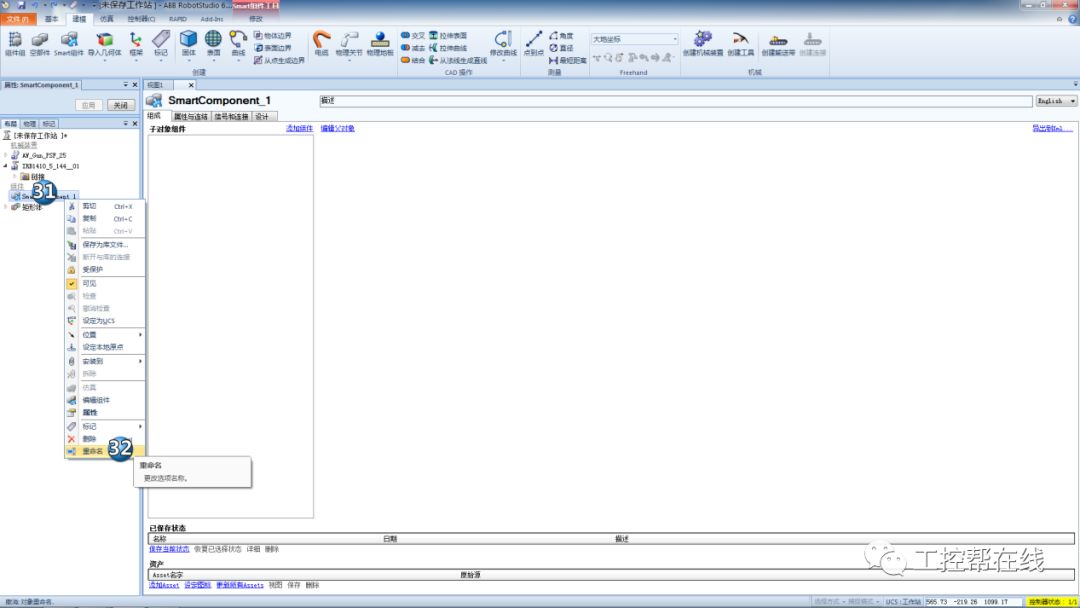
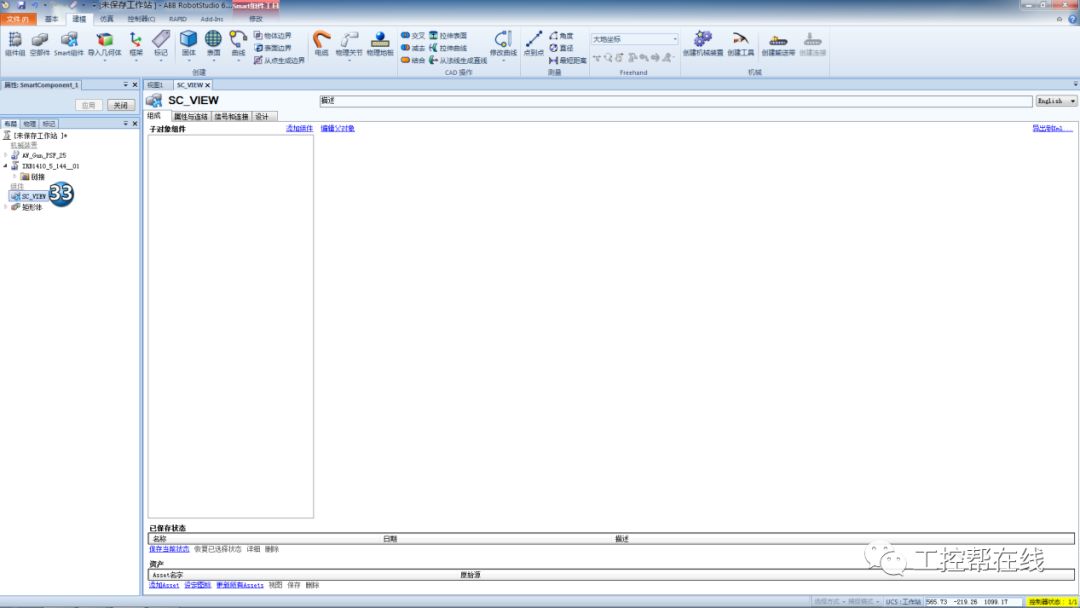
重命名为“SC_VIEW”。
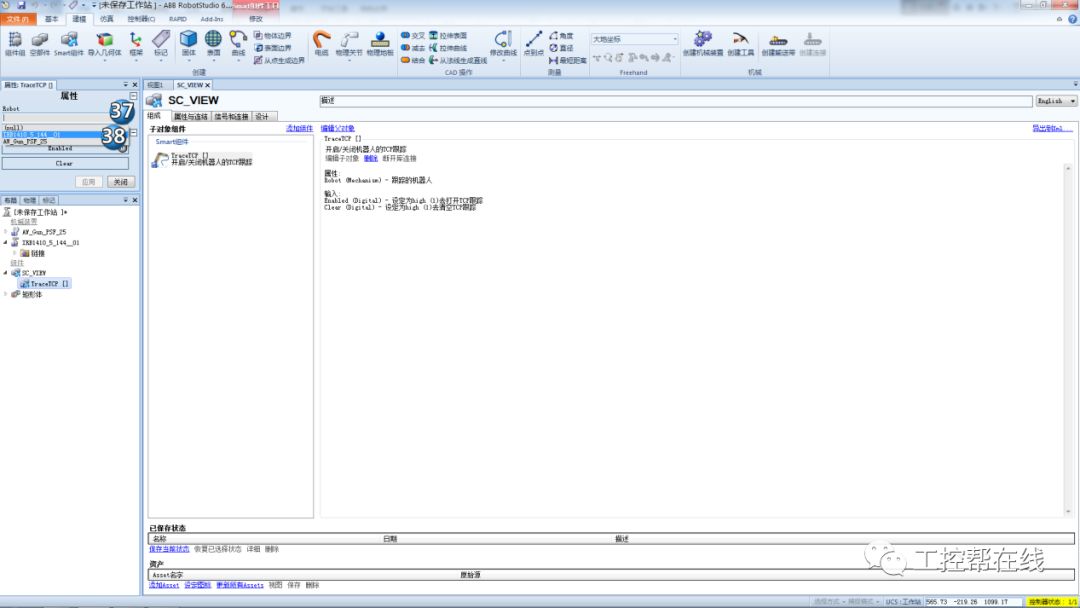
在“添加组件”-“其他”中选择添加一个“TraceTCP”组件,这是专门用来打开关闭TCP跟踪的组件。
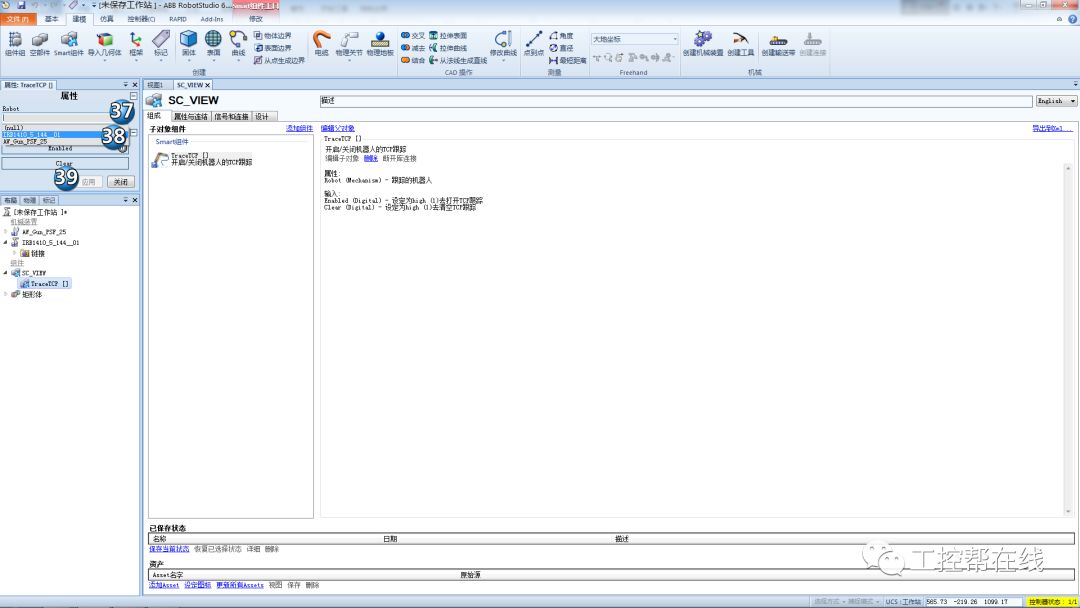
在其属性中选择我们当前的机器人。
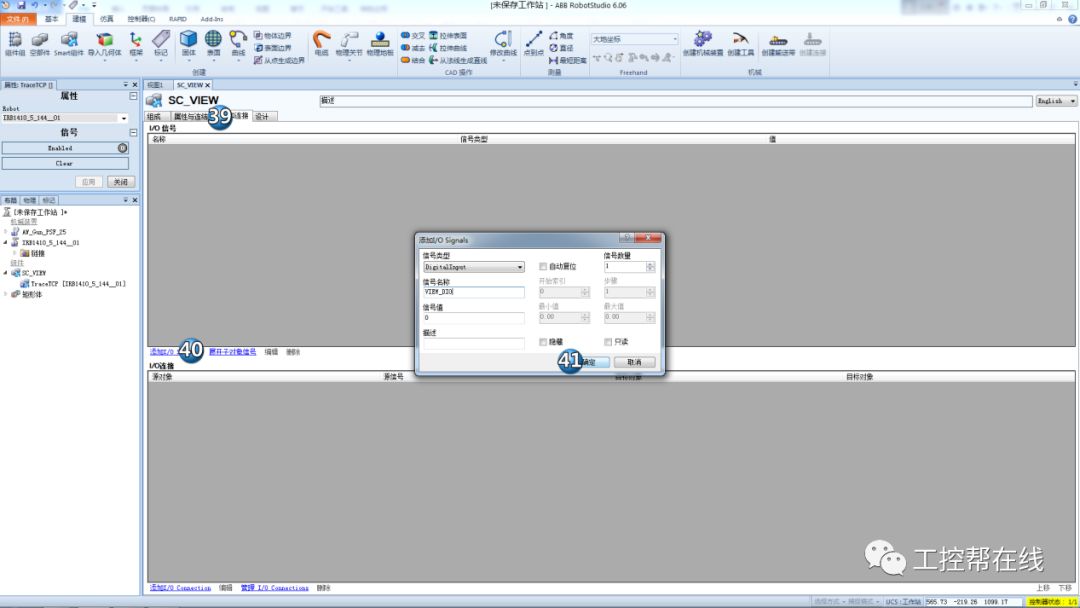
然后选择信号和链接添加一个数字输入信号“VIEW_DI0”。
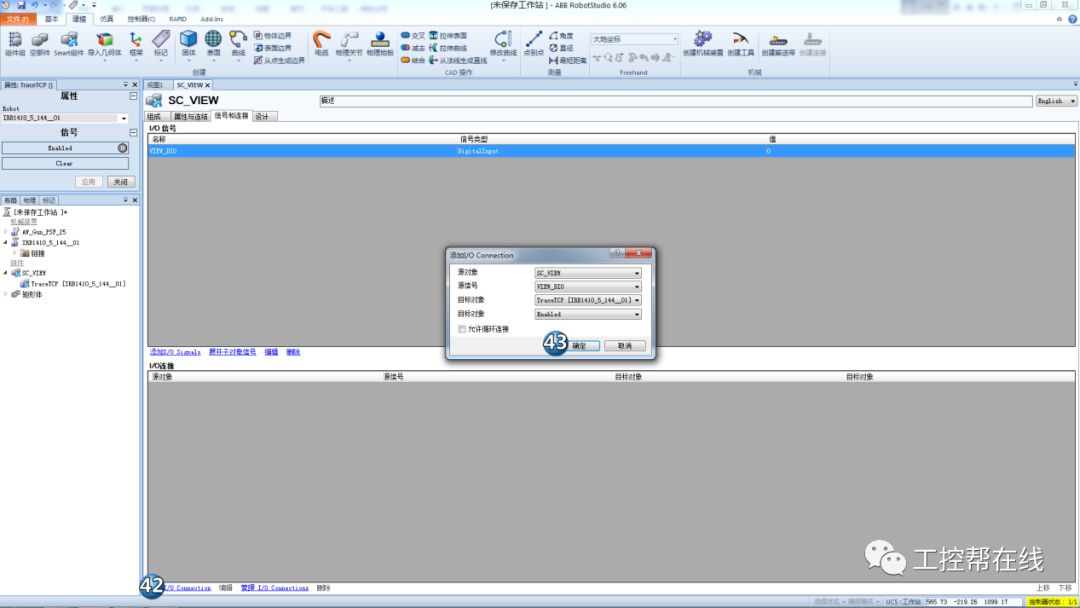
然后添加以下链接,将信号与组件关联起来。
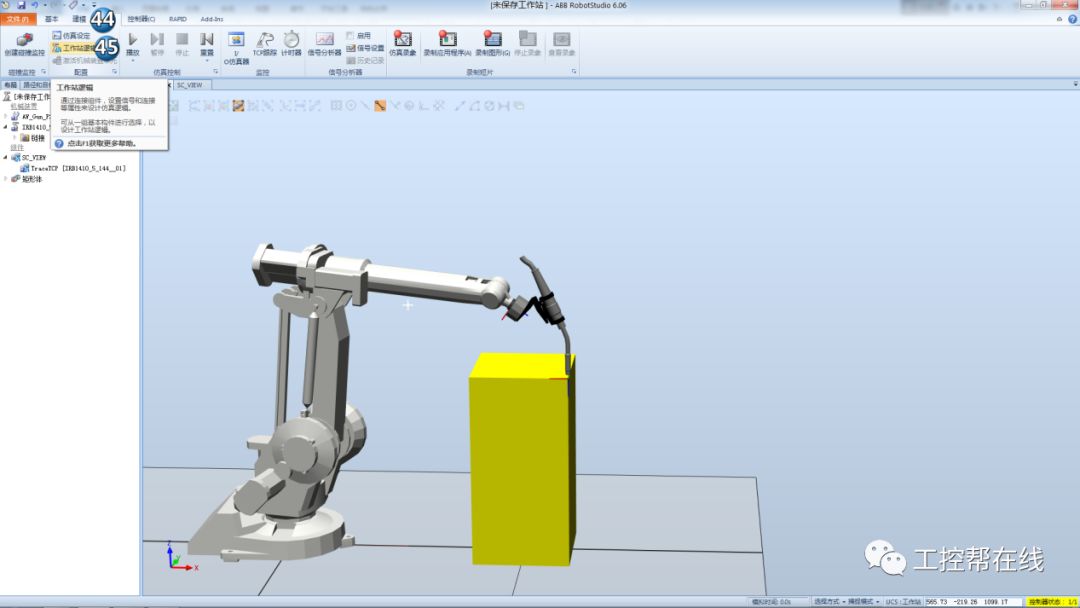
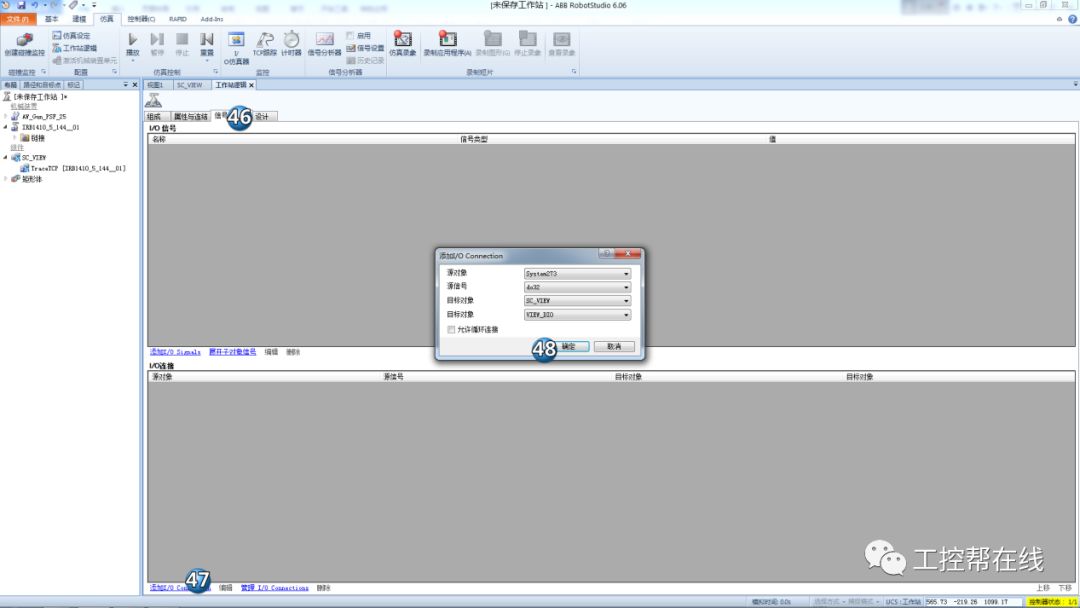
然后切换到“仿真”选项卡,进入工作站逻辑。
然后添加如下链接。
然后我们来调整下TCP跟踪的颜色,使之明显一些。
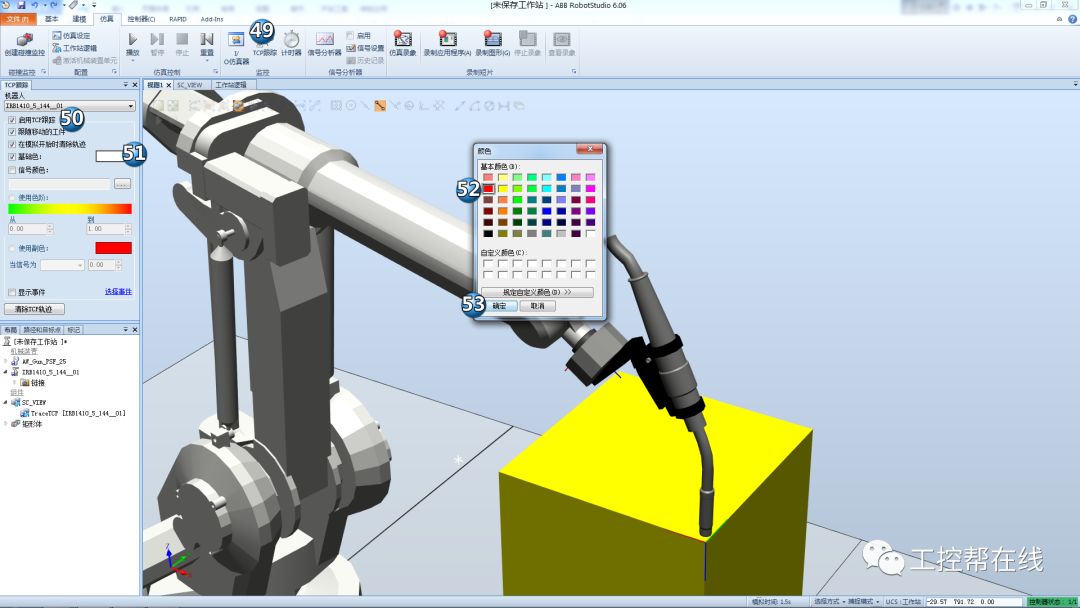
颜色调整好之后记得取消勾选TCP跟踪然后关闭该菜单,因为我们这次要用程序来控制TCP跟踪。
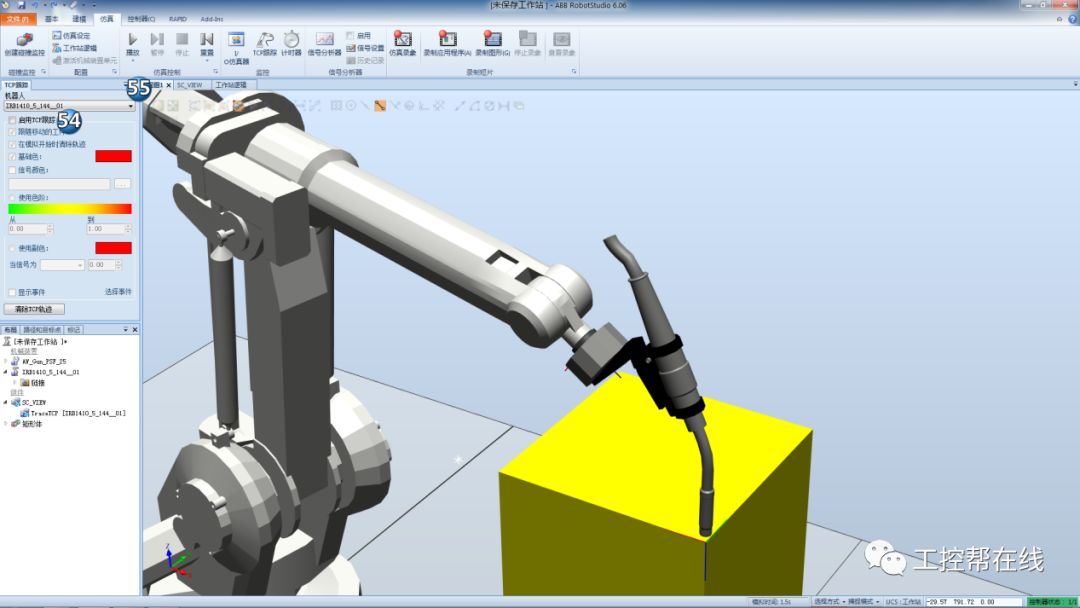
然后就可以测试运行了。
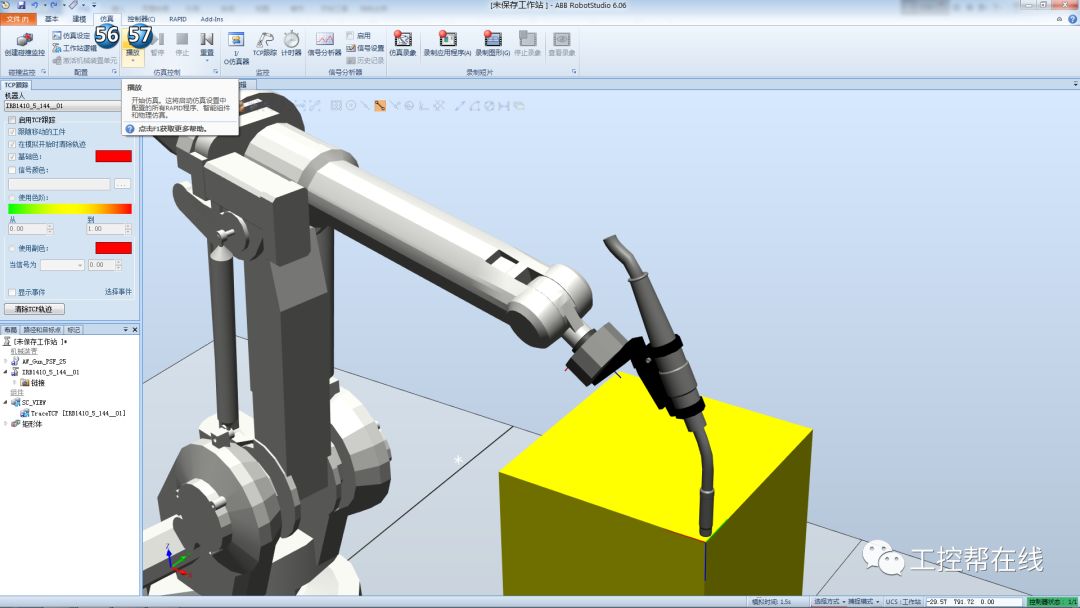
运行过后就出现了需要分析的轨迹。
- 相关推荐
- 热点推荐
- RobotStudio
-
RobotStudio随真实控制器安装选项及应用2018-05-07 17898
-
什么是自动高速跟踪快球2008-12-29 3630
-
视频跟踪(目标取差器)-基于DM8168实现的自动视频跟踪2013-09-05 6628
-
请问在WICED中可以同时打开多少个TCP sockets?2018-08-14 1518
-
自动化行业的Modbus TCP和PROFINET2018-10-22 3478
-
Robotstudio软件:工作站中多台机器人I/O通信仿真实现分享2021-07-02 2553
-
基于openmv的自动跟踪小车实现2022-01-14 1436
-
怎么安装离线编程软件RobotStudio?2018-04-24 12119
-
RobotStudio中创建和控制变位机的详细步骤2019-02-02 14570
-
串口转换TCP/IP服务器在电力抄表自动化系统中的应用2020-12-08 2420
-
焊接自动跟踪系统由什么组成2023-04-18 1369
-
激光焊缝跟踪传感器在自动化焊接流程中的作用2023-11-28 1442
-
labview打开TCP报63错误代码2023-12-28 8982
-
RobotStudio 6.08的手动操作方法2024-12-18 7559
-
工业相机在焊缝跟踪中的关键作用有哪些2025-05-13 952
全部0条评论

快来发表一下你的评论吧 !
