

光学图像测试之景深效果测试
电子说
描述
Bokeh(背景虚化),指成像的焦外部分呈现模糊的美学效果,它在视觉上吸引我们关注图像某一特定的区域(通常是主体部分),如下图一所示人物主体突出,背景呈现模糊效果。
图一 双摄bokeh示例图
景深基本原理介绍
立体视觉主要研究如何借助(多图像)成像技术从(多幅)图像中获取场景中物体的距离(深度)信息。双目立体视觉,则是使用两台摄像机获得同一场景的两幅视点不同的图像,通过视差信息获得深度信息。
如下图所示是双目横向模式成像示意图,两个镜头R和T中心的连线为基线B,空间中的点P在R和T中成像分别对应点p和p’,利用相似三角形原理则可以计算出P点的景深Z:

其中d= ,为P点在左右图像中的视差;f为摄像头的焦距。
,为P点在左右图像中的视差;f为摄像头的焦距。
图二 平行双目成像中的景深
对于给定基线b和焦距f的双摄设备,系统的景深范围受到双摄成像视差[dmin, dmax]的限制,景深信息被离散化成如图三所示的平行平面,每个视差值对应一个景深平面,通过左右图像的视差图可以映射成景深图。
图三 深度图
景深效果客观测试方法
展锐的测试主要是结合DXO测试进行的,我们在实验室利用DXO的测试场景,从得出的结果来计算散景问题。另一方面我们从自己搭建的实验室对景深做光圈、分离等验证测试,如下图四是实验室场景一角,如图五为拍摄规范:
图四 实验室场景
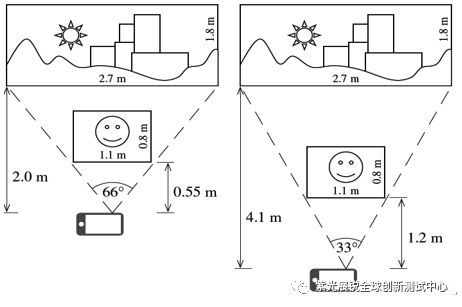
图五 拍摄规范
1
主题/背景分割
主题和背景之间的精确分割是获得类似DSLR结果的关键。当前 实现遭受深度图分辨率太低,导致不精确的边缘和深度估计误差。后者通常导致背景中的锐利区域和/或对象上的模糊区域,特别是在捕获移动场景时。
2
等效光圈
在查看计算散景时,等效光圈不再取决于相机的物理特性,而是取决于应用的图像处理。我们通过比较测试场景的某些区域中的模糊水平与不同孔径下的全帧DSLR的模糊水平来估计该值。
3
模糊渐变
模糊强度应随深度而变化。基本肖像可能仅包含两个与传感器平面或多或少平行的平面,但大多数场景具有更复杂的三维构图。因此,平滑模糊渐变对于实现类似DSLR的散景非常重要。
4
噪声一致性
当更详细地观察计算散景图像时,我们可以观察到模拟的有趣副作用 - 即,计算模糊的区域完全没有颗粒。这并不奇怪,因为模糊是一种众所周知的去噪技术。然而,它导致散景具有不自然的外观,因为DSLR在光线甚至撞击传感器之前光学地产生模糊。因此,在图像的对焦区域和离焦区域中,噪声是相同的。
5
散景人物
“角色”是摄影师在讨论散景时的想法。不幸的是,对于完美的散景应该是什么样的,没有普遍的共识。也就是说,在这方面,计算散景似乎比光学变体更简单。目前没有智能手机可以模拟光学渐晕,这会导致散景形状在整个画面中变化,也不会模仿非圆形的光圈,从而形成非圆形的散景形状。也没有任何紫色或绿色条纹(由色差引起),“肥皂泡”(由过度校正的球面像差引起)或“甜甜圈”(由反射折射镜片引起)。一些摄影师依靠这些效果来实现特定外观,但智能手机制造商似乎认为它们不会吸引普通用户,因此提供不同的圆形形状清晰度。
6
重复性
光学散景与曝光无关。然而,计算散景在明亮的条件下往往效果最好。更多的光增加了图像中的信噪比并且有助于深度图的计算。但即使在一致的照明下,我们发现许多设备的行为也不稳定。没有任何明显的原因,一些图像在一个图像上可见,但在另一个图像上不可见。有时散景模式完全失败,无需任何模拟背景模糊即可捕获图像。
景深效果主观测试方法
主观测试主要根据以下场景进行分类,并对其进行等级划分。在拍摄上也要有一定的针对性,如主体对象、主体形态、环境亮度、背景形态,拍摄距离等。
图六主观测试设计要素
紫光展锐在光学图像测试上的能力
为了满足产品研发以及客户量产的需求,2014年起紫光展锐购买了业界先进的测试设备、建设了专业的光学测试实验室并建立了质量评估模型,通过1000多项客观测试指标以及多种场景下的主观评价,对产品质量做出综合竞争力评估。目前紫光展锐光学测试实验室每年为大量客户提供调试和咨询服务,以保证客户产品的质量。
-
基于干涉的光学测试系统2026-04-08 89
-
超景深显微镜的工作原理与测试影响因素2025-10-09 883
-
光学图像加密技术的优势分析2024-03-27 1953
-
光学图像稳定原则2024-01-31 1609
-
光学图像信息传递系统概述2023-06-08 1362
-
光学成像系统之景深概念与原理及计算说明2021-04-14 18054
-
用MATLAB进行当代光学图像处理(英文版)2021-03-22 774
-
用于手机相机的光学图像稳定解决方案2019-07-22 2788
-
光学图像的多粒度感知算法2018-01-09 1092
-
光学图像的退化和恢复模型及其消模糊处理介绍2017-11-13 1642
-
美图软件背景虚化景深效果详细教程2017-09-25 1060
-
光学测试技术2012-11-20 9121
-
图像处理2012-07-20 10135
-
基于小波阈值理论的光学图像去云处理新算法2010-05-12 921
全部0条评论

快来发表一下你的评论吧 !
