

温度传感器如何与上位机之间实现Modbus通讯
MEMS/传感技术
描述
邦纳振动和温度传感器分为 QM42VT1 和 QM42VT2 两种,可以用于监视电机的运行,判断其是否处于正常的振动和温度状态,并将振动和温度数据传送到上位机系统,收集数据分析趋势。
今天为大家分享这两种传感器怎样与上位机之间实现Modbus通讯。
一
QM42VT1
1. 系统搭建:
2. 接线:
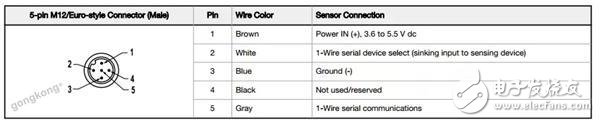
QM42VT1针脚定义:
DX80无线网关(DX80G2M2S-P)针脚定义:
3. 绑定:
绑定之前注意先将Q45无线节点唤醒:
4. 收数:
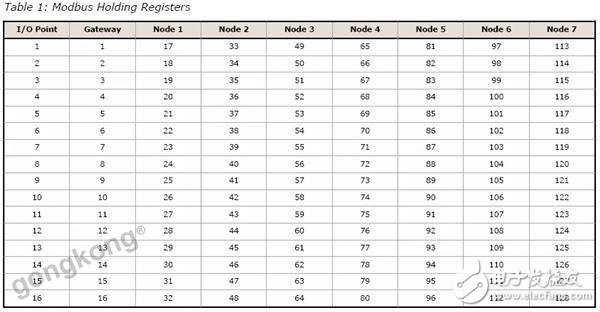
DX80G2M2S-P无线网关的寄存器地址:
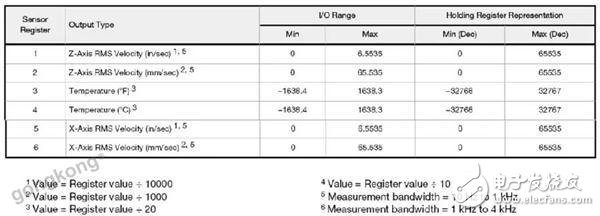
QM42VT1传感器寄存器:
所以,如果只有一个QM42VT1,它对应的节点ID=1,那么QM42VT1的Z-AxisRMS Velocity(in/sec)对应DX80G2M2S-P无线网关的寄存器地址17,Z-Axis RMS Velocity(mm/sec)对应DX80G2M2S-P无线网关的寄存器地址18,其余对应关系依此后推。
Modbus通讯读寄存器指令格式:
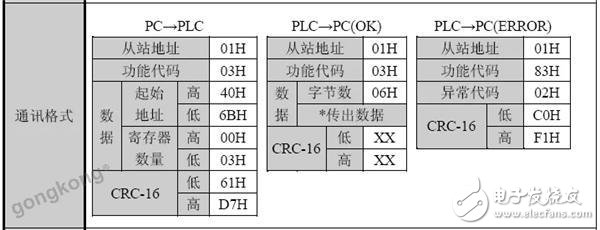
Modbus通讯读寄存器地址向前偏移一位,所以QM42VT1的Z-AxisRMS Velocity(in/sec)对应Modbus寄存器地址为16(十进制),十六进制为10,通过CRC校验计算出CRC-16的高低位。
DX80的网关上绑定节点ID=1时发送的指令:
发数:01 03 00 10 00 06C4 0D
01:从站地址;
03:功能代码;
00 10:起始地址;
00 06:寄存器数量;
C4 0D: CRC-16的高低位。
通过串口调试助手得到回数:
回数:01 03 0C 00 2E 006C 06 25 02 06 00 47 00 B6 BD F3
01:从站地址;
03:功能代码;
0C: 回数字节数;
00 2E 00 6C 06 25 02 06 00 47 00 B6 :传出字节数;
BD F3:CRC-16的高低位。
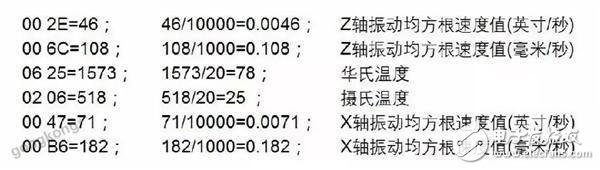
对传出字节数00 2E 00 6C 06 25 02 06 00 47 00 B6结合QM42VT1传感器寄存器表进行分析:
DX80的网关上绑定节点ID=2时发送的指令:01 03 00 20 00 06 C4 02
其余ID号对应指令可自行推算。
二
QM42VT2
1. 系统搭建:
QM42VT2通过吸磁安装直接吸附在电机上,尾部出线通过RS485转串口连接到电脑上。
2. 接线:
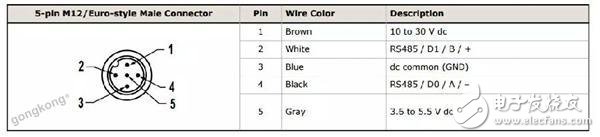
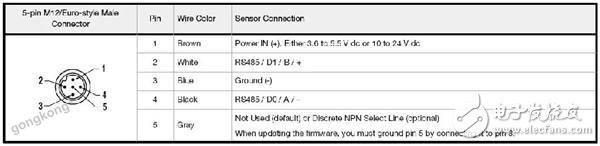
QM42VT2针脚定义:
3. 收数:
QM42VT2传感器寄存器:
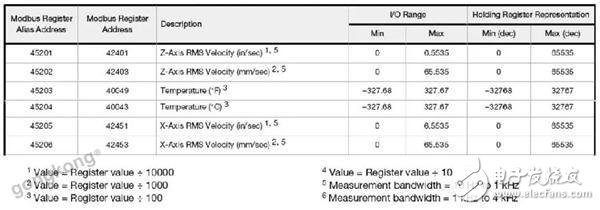
Modbus通讯读寄存器地址向前偏移一位,通过上表可知,QM42VT2的Z-AxisRMS Velocity(in/sec)对应Modbus寄存器地址为5200(十进制),十六进制为1450,通过CRC校验计算出CRC-16的高低位。
QM42VT2的ID=1的指令:
发数:01 03 14 50 00 06C0 29
通过串口调试助手得到回数:
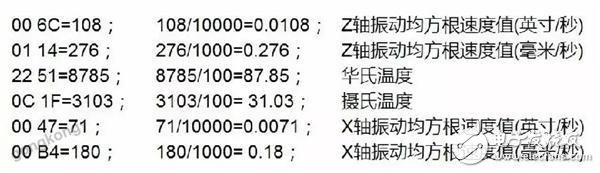
回数:01 03 0C 00 6C 01 14 22 51 0C 1F 00 47 00 B4 1A 8C
00 6C 01 14 22 51 0C 1F 00 47 00 B4:传出字节数;
QM42VT2的ID=2的指令:02 03 14 50 00 06 C0 1A
其余ID号对应指令可自行推算。
-
数据中台实现Modbus温度传感器对接到IOT平台2025-05-27 884
-
上位机与下位机之间的通讯方式2024-06-06 9063
-
上位机通过Modbus转Profinet网关与变频器通讯应用在卷材机上案例2023-12-02 2181
-
上位机通过Modbus转Profinet网关与CGV300变频器通讯配置案例2023-10-26 1833
-
上位机通过Modbus转Profinet网关与变频器Modbus通讯配置案例2023-10-25 2136
-
C#编写Modbus协议加速度传感器上位机2023-05-09 592
-
单串口服务器连接温度传感器通讯概述2022-02-16 1531
-
求一种基于阿里云实现物联网多种传感器上云解决方案2021-12-17 1685
-
移通创联MODBUS转PROFIBUS网关和霍尼韦尔DCS系统之间通讯2021-10-29 12721
-
单串口服务器连接温度传感器通讯介绍2021-10-21 3401
-
如何去实现ModBUs Poll上位机和单片机之间的通信2021-09-18 3459
-
modbus通信labview实现2017-08-14 8184
-
上位机MODBUS RTU多从站通讯的VB程序2016-10-12 2523
-
上位机调用端口和传感器的问题2014-12-17 6098
全部0条评论

快来发表一下你的评论吧 !
