

SMART如何与V90伺服实现内部位置控制
电子说
1.4w人已加入
描述
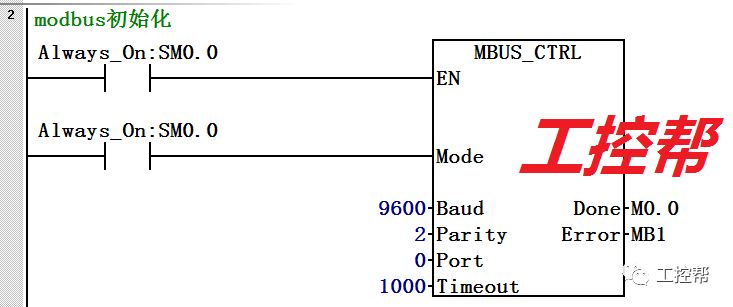
V90伺服可实现内部位置控制,但使用PLC的I/O口控制接线及应用相对比较复杂,V90集成了Modbus和USS通信,可以利用通信控制伺服实现内部位置控制和速度控制,只需要一根通信电缆即可实现控制大为的简化了接线。关键在于如何编写modbus通信程序。
一.位置模式IPOS伺服的关键参数进行设置:
1. 为驱动设置 RS485 总线地址。• p29004 = 12. 通过参数 p29007 选择 Modbus 协议。• p29007 = 23. 通过参数 p29008 选择 Modbus 控制源。• p29008 = 1(p29008 = 1:设定值和控制字来自于 Modbus PZD)4. 通过参数 p29009 设置传输波特率。• p29009 = 6(9600波特率)5. 保存参数并重启驱动。6. 设置驱动的工作模式为 IPOS控制模式。7. 配置 PLC 相关参数。
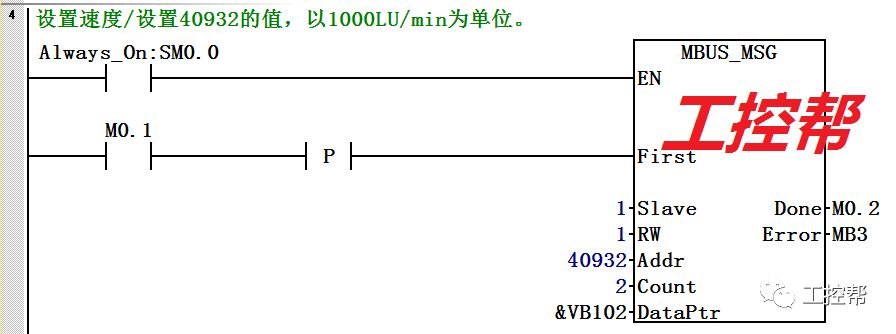
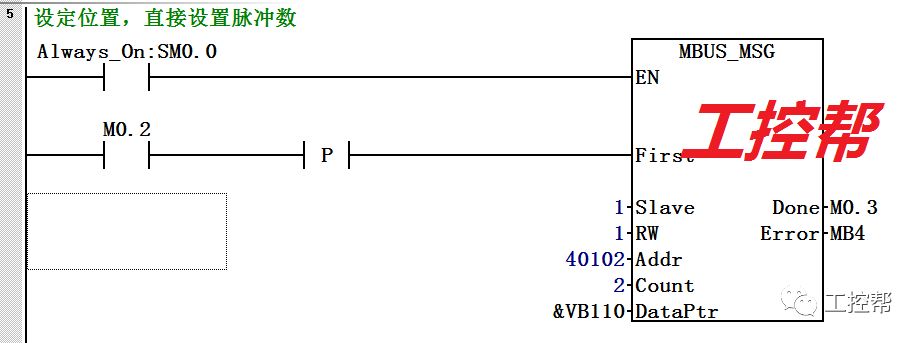
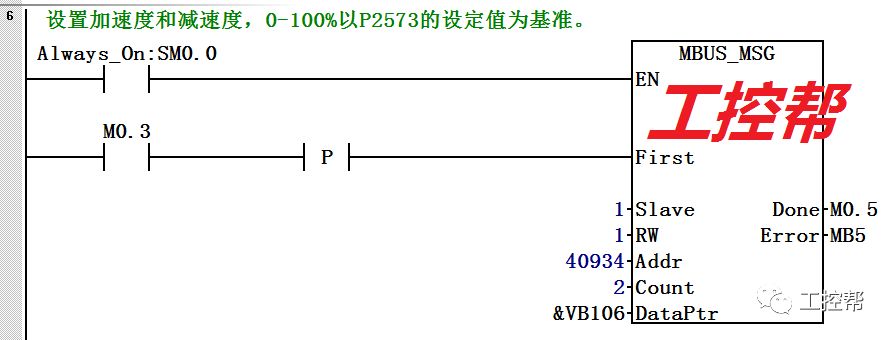
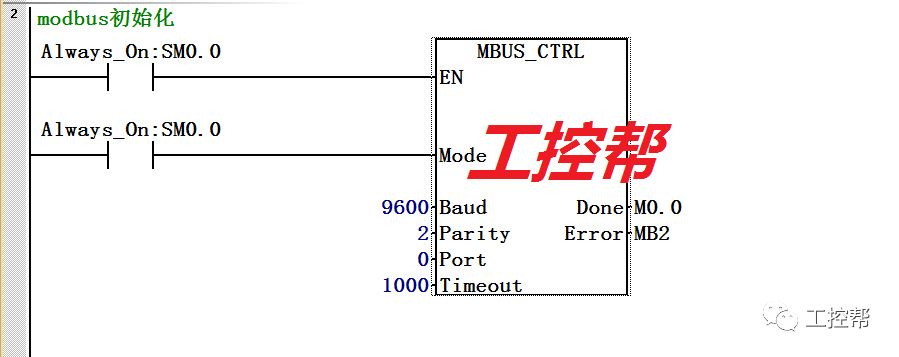
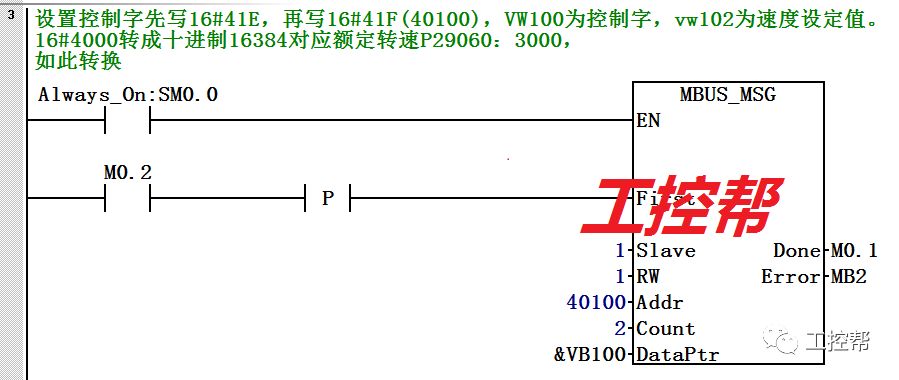
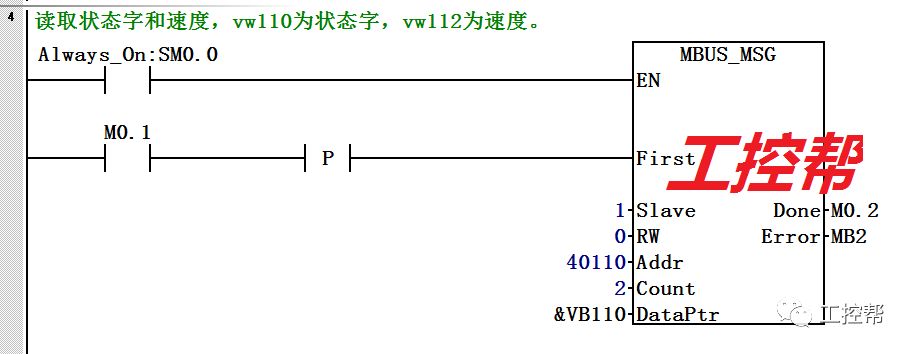
编写程序:
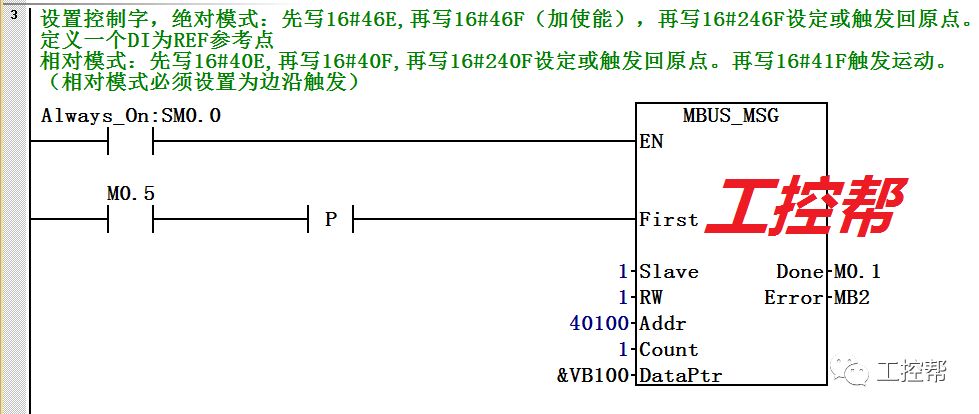
控制字每位设置方法如下表:
| 位 | 信号 | 描述(IPOS内部位置模式) |
| 0 | SON_OFF1 | 通过上升沿伺服使能(脉冲可以被使能)0: OFF1(通过斜坡函数发生器停车,脉冲被取消,准备上电就绪) |
| 1 | OFF2 | 1:无 OFF2(允许使能)0: OFF2(立即取消脉冲,上电被禁止) |
| 2 | OFF3 | 1:无 OFF3(允许使能)0: OFF3(快速停车,脉冲被消除且上电被禁止) |
| 3 | OPER | 1:允许运行(脉冲可以被使能)0:禁止运行(取消脉冲) |
| 4 | SETP_ACC | 触发上升沿来接收 MDI 设定值 |
| 5 | TRANS_TYPE SE | 1:立即接收新的设定值0:通过触发上升沿来接收新的设定值 |
| 6 | POS_TYP | 1:绝对定位0:相对定位 |
| 7 | RESET | 复位故障 |
| 8 | 预留 | |
| 9 | 预留 | |
| 10 | PLC | 使能 PLC 的控制权 |
| 11 | 预留 | |
| 12 | 预留 | |
| 13 | SREF | 启动回参考点(对于回参考点模式0,用作 REF 信号) |
| 14 | 预留 | |
| 15 | 预留 |
二.速度模式S参数设置:
1. 为驱动设置 RS485 总线地址。• p29004 = 12. 通过参数 p29007 选择 Modbus 协议。• p29007 = 23. 通过参数 p29008 选择 Modbus 控制源。• p29008 = 14. 通过参数 p29009 设置传输波特率。• p29009 = 6(9600波特率)5. 保存参数并重启驱动。6. 设置驱动的工作模式为 S 控制模式。7. 配置 PLC 相关参数。
编写程序:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
V90伺服控制器回零2024-09-02 616
-
用Smart ST60控制V90走绝对定位控制,怎么调整伺服加减速时间及伺服刚性?2023-11-06 1310
-
西门子V90伺服驱动系统2023-03-17 937
-
SINAMICS V90基本伺服驱动系统产品样本2021-11-19 837
-
V90伺服驱动系统使用指导2021-04-23 1821
-
实例S7-1500PLC连接SINAMICS V90伺服系统实现位置闭环控制2019-04-11 26677
-
轻松搞定西门子V90高性能伺服的办法2019-02-12 21649
-
S7-200 Smart如何通过Modbus通信实现对V90的速度控制2018-10-08 2180
-
如何通过FM353实现与V90的位置控制2017-11-21 1602
-
基于S7-200实现V90位置控制的MDI功能介绍2017-09-29 2813
-
S7-1200连接V90实现位置闭环控制设计2017-09-28 2709
-
基于S7-1200的V90的位置控制2017-09-27 1474
全部0条评论

快来发表一下你的评论吧 !
