

深度分析LiDAR技术
电子说
描述
相对于传统测距传感器,激光雷达在测量精度、测量距离、角分辨率、抗干扰能力等方面具有巨大的综合优势。
01
背景概述
雷达(英文Radar的音译,源于radio detection and ranging的缩写),意思为"无线电探测和测距",发射电磁波对目标进行照射并接收其回波,由此获得目标的距离、速度、方位、高度等信息。
传统雷达以微波作为载波的雷达,大约出现在1935年
雷达按频段可分为:超视距雷达、微波雷达、毫米波雷达以及激光雷达等
激光雷达即激光探测及测距系统LiDAR(Light Detection and Ranging),是一种通过发射激光束探测目标的位置、速度等特征量的雷达系统。
用激光器作为发射光源,采用光电探测技术手段的主动遥感设备。激光雷达是激光技术与现代光电探测技术结合的先进探测方式。由发射系统、接收系统 、信息处理等部分组成。
激光波的优异性能:
角分辨率和距离分辨率高
抗干扰能力强
能获得目标多种图像信息(深度、反射率等)
体积小,质量轻
探测反射率信息,这一点在做无人驾驶中的车道线信息识别非常重要
激光以波长短、准直性高的性能优势,广泛应用在测绘、气象监测、安防、无人驾驶等领域。
激光雷达自1960年作为一种全新的测量工具发展至今,到三维扫描和无人驾驶上的应用,蕴含着巨大的商业价值。
02
工作原理
激光雷达与微波雷达的异同:
激光雷达工作原理:
向被测目标发射探测信号(激光束),然后测量反射或发射信号的到达时间、强弱程度等参数,以确定目标的距离、方位、运动状态及表面光学特性。
用飞行时间法(Time of flight method)测算出L:
从公式可以看出精度取决于时间,所以对接收装置的要求很高。如果做到1cm的精度,可以推出对时间的测量精度达到0.067ns。
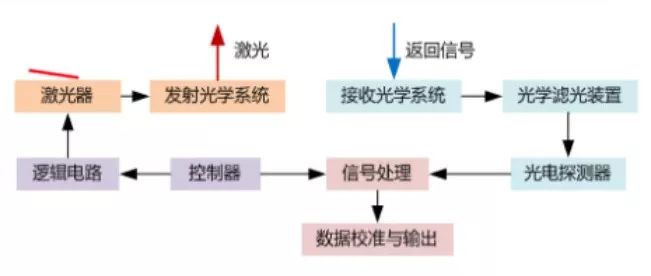
激光雷达系统组成:
发射单元,激光器、发射光学系统。发射激光束探测信号
接收单元,接收光学系统、光学虑光装置、光电探测器。接收反射的激光信号,即回波信号
控制单元,控制器、逻辑电路。控制激光激发、信号接收及系统工作模式
信号处理单元,信号处理、数据校准与输出。光电转换,信号分析,数据获取
激光雷达八大核心技术指标:
这些核心指标参数,其实就可以判断一个传感器是否满足你的使用需求
最大辐射功率
第一重要的参数,首先看是否得到安全认证,是否需要做防护
水平视场
机械式雷达360度旋转,水平全视角
垂直视场
一般16线俯仰角30度,从-15度到15度,应用最多、最广泛
光源波长
光学参数,纳米参数
最远测量距离
是否满足长距离探测
测量时间/帧频率
雷达返回一圈的时间
纵向分辨率和水平分辨率
对算法影响大,精度越高价值越贵,满足应用的情况下,选性价比高的
测距精度
厘米级已经满足无人驾驶的应用场景
激光雷达分类:
03
关键技术
激光雷达融合激光、大气光学、雷达、光机电一体化和信号处理等诸多领域技术,下面逐一介绍各关键技术
1.激光器技术
激光器是激光雷达的核心
激光器种类很多,性能各异,需要综合考虑各种因素后加以选择
考虑因素包括:波长、大气传输特性、功率、光束截面、发散角、信号形式、平台限制(体积、重量和功耗)、对人眼安全程度、可靠性、成本和技术成熟程度等
2.探测器及探测技术
探测器:能把光辐射转换成一种便于测量(电压或电流)的物理量器件。有如下关键参数
积分灵敏度:也称为响应度,表示光电流与入射光功率的关系
光谱灵敏度:表征探测器的光谱选择特性
频率灵敏度:也称响应频率或响应时间
适合于激光雷达的光电探测器主要有PIN光电二极管、硅雪崩二极管(Si-APD)等
PIN光电二极管:频带宽(可达10GHz)、灵敏度高、线性输出范围宽、噪声低
硅雪崩二极管(Si-APD):超低噪声、高速(0.1nm)、高互阻抗增益,0.6-0.9μm
探测技术
直接探测(能量探测)
利用探测器的光电转换功能直接实现对光信号的信息解调
优点:系统简单
缺点:精度低、对噪声敏感
相干探测(外差探测)
和直接探测相比,多了一路本振激光输出,平衡探测器起到光混频器的作用,它响应于信号光和本振光的差频分量,输出一个中频光电流
优点:灵敏度高,精度高
缺点:系统复杂
3.光学系统设计技术
发射光学系统
激光二极管示意图
各种激光器发射的激光束并不是绝对平行的,通常有几个毫弧度(mrad)发散角,到达远处时光斑直径很大。
通过理想的透镜系统,可以改变发射光束的发散度、波束宽度和截面积,总功率保持不变。
发射光学系统,也称为发射光学天线,一般由准直镜、扩束镜(望远镜光学系统)和辅助光学系统组成。
准直镜解决激光器准直输出问题
扩束镜解决进一步压缩激光发散角问题
辅助光学系统解决激光束偏振太控制、光隔离等问题
需要根据激光器类型(如激光二极管、固体激光器、光纤激光器或气体激光器)及其输出参数二具体设计。
接收光学系统
也称为接收光学天线。
为了尽可能地将目标发射回来的激光能量会聚到探测器上,而且适当限制接收接收视场,减小杂散光的干涉,提高接收机的灵敏度和信噪比。
对于远距离探测,常采用望远镜加物镜的结构设计或远心成像光学系统。
4.激光传输技术
大气消光特性
地球大气由空气分子以及固体和液体悬浮颗粒(也称为气溶胶)组成。
激光在传输过程中存在分子、气溶胶的吸收和散射衰减效应。
分子吸收具有非常强的光谱选择特性,其中水蒸气、二氧化碳和臭氧是主要吸收分子
对于激光雷达来讲,常用的位于大气窗口的波长有~1.5μm,~1μm,0.85μm,和0.78μm波段
分子散射也称为瑞利散射,它与大气浓度和入射光波长相关
在近地大气层常见以下几种大气光学状态:烟雾雨雪等,需根据经验公式推算激光衰减规律。
目标特性
向后角反射器
也称为立方角锥棱镜,实际上它是由3个镀有反射膜且互相垂直的反射面构成的四面体,相当于是从一个立方体切下来的一个角
出射光与入射光平行,但方向相反,属于合作目标,广泛应用于月球和卫星的激光定位、宇宙飞船的对接系统及大地测量
朗伯目标
是指散射光强遵循朗伯余弦定律的表面,确切地说,从材料表面任何给定方向上反射的光强(单位立体角通量)正比于该方向与表面法线之间夹角的余弦
根据激光雷达截面积大小,分为点目标、大目标、扩展目标
气溶胶和空间散射物
光学散射效应:拉曼散射、米散射、瑞利散射
雷达截面积与激光束穿透溶胶的传输损耗密切相关
5.成像扫描技术
机械旋转
在定位方向(水平方向)采用机械360°旋转扫描技术。
在俯仰方向(垂直于水平面方向)均采用了定向分布式扫描技术。
多线性,探测器与激光器一一对应
不同激光器发射光束经光学透镜后成一定夹角出射
优点:单点测量精度高、抗干扰能力强、可承受高激光功率
缺点:垂直扫描角度固定、装调工作量大
MEMS型
利用MEMS微振镜(MEMS指的是微机电系统),把所有的机械部件集成到单个芯片,利用半导体工艺生产
优点:集成度高、体积小、损耗低
芯片级工艺,适合量产
缺点:高精度高频振动控制难度大、制造精度要求高
无法实现360°扫描,需组合使用
光学相控阵(全固态)
其原理与相控阵雷达一样,通过调节发射阵列中每个发射单元的相位差来改变激光的初设角度
优点
扫描速度快:一般可以达到MHz量级以上
扫描精度高:可以做到μrad(千分之一度)量级以上
可控性好:可以在感兴趣的目标区域进行高密度的扫描,这对于自动驾驶环境感知非常有用
缺点
易形成旁瓣,影响光束作用距离和角分辨率,干涉效果易形成旁瓣,使得激光能量被分散
加工难度高:光学相控阵要求阵列单元尺寸必须不大于办个波长
Flash型
传统激光雷达是逐点扫描式,单次发射只探测某个方位
falsh型激光雷达单次探测可覆盖视角内所有方位,一次性实现全局成像,故也称为闪烁式激光雷达
使用探测器阵列探测返回信号
优点
无扫描器件,成像速度快
集成度高,体积小
芯片级工艺,适合量产
缺点
激光功率受限,探测距离近
抗干扰能力差
角分辨率低
无法实现360°成像
6.信号处理技术
接收信号噪声种类
目标信号:由于目标反射在像平面上行成的信号(weak single)。
大气后向散射信号:激光冒充在照射一定厚度传播介质时所有其的向后散射干扰信号。
背景干扰信号:由于背景反射在像平面上所形成的信号。
太阳辐射:太阳辐射照射 在目标或传播介质后所反射的信号。
7.数据校准技术
输出点云中每个点包含4个物理量:X、Y、Z、Intensity
XYZ:方位信息,Intensity:反映物体反射特性,蓝→红表示物体反射率→高
同一种材料的物体呈现接近的颜色,丰富Intensity信息有助于判断周围环境,比如车道线
难题:相同表面特性的物体假设为漫反射其反光功率也随着距离的平方而线性衰减,如何保证同一类物体点云中呈现的Intensity保持一致?
Intensity校准技术
探测距离增加导致的误差具体来源于两个方面
返回至激光雷达的反射光功率随着距离的平方而线性衰减
返回至激光雷达的反射光经接收透镜成像在单点探测器的位置和距离有关
(像点与探测器错位会引起响应度下降)
校准方案需要围绕上述两个误差源进行
04
应用领域
应用领域
激光雷达因为其性能优势,在无人驾驶、地图测绘、无人机、机器人、安防、气象监测领域有着广泛的应用
市场趋势
无人驾驶
激光雷达是无人驾驶汽车的关键核心部件之一,有效提供车辆决策与控制系统所需的高精度地图和定位避障功能,具有不可替代的作用
激光雷达的应用环节(点云处理之前)
驱动
外参指标
时间同步
多雷达融合
与其它传感器的融合(相机、IMU、Radar等)
总结
相对于传统测距传感器,激光雷达在测量精度、测量距离、角分辨率、抗干扰能力等方面具有巨大的综合优势。
激光雷达技术难点集中在光学系统设计、成像扫描、控制系统、多线单元装调、信号/数据校准等环节。
作为无人驾驶系统的关键组件,激光雷达发展方向将是细分化,适用不同场景做到最高性价比,固态和机械式都将依靠各自的优势占据自己的市场。
-
LiDAR如何构建3D点云?如何利用LiDAR提供深度信息2021-04-06 5336
-
什么是LiDAR?LiDAR的工作原理2022-02-06 12449
-
速腾聚创首次发布LiDAR算法 六大模块助力自动驾驶2017-10-13 2811
-
LIDAR与RADAR在自动驾驶汽车中的比较2018-10-30 6650
-
如何选择汽车LiDAR的激光器和光电探测器2018-11-08 2751
-
实现“三重视野” – LiDAR技术实现安全驾驶2020-08-20 2573
-
请问LIDAR感知挑战有哪些?2021-06-17 2101
-
德国Sick推出基于LiDAR的自由行驶车辆分析系统2019-05-20 4306
-
LeddarTech和ST合作开发基于LeddarEngine技术的LiDAR解决方案2020-06-02 2990
-
LiDAR已成为支持自动驾驶转变的最受讨论技术之一2020-12-01 2670
-
LiDAR激光雷达技术原理及Arduino示例代码纠错2022-07-21 6420
-
如何利用LiDAR实现深度感测2023-12-06 1497
-
基于LiDAR的行人重识别的研究分析2023-12-11 1618
-
LiDAR线圈如何驱动无人驾驶技术2025-11-30 834
-
Intel RealSense LiDAR Camera L515:小身材大能量的深度感知利器2026-05-19 298
全部0条评论

快来发表一下你的评论吧 !
