

自适应巡航是什么?它与定速巡航有区别吗?
电子说
描述
自适应巡航设计初衷是减轻驾驶员长途驾驶的疲劳,极为复杂的城市路况并不是它发挥作用的地方。虽然现在的自适应巡航系统具备了根据前车情况、根据路况减速,甚至是刹停的功能,不过其开发之初便是为了减少驾驶员高速行车疲劳度,而不是依据主动驾驶功能而开发。换言之,这套系统的减速与刹车停止功能判断逻辑并不是以应付城市中复杂的低速路况而研发的。请牢记:它只是减低高速行驶时的疲劳感,而非永久解放人双手的功能!
有人说科技是因为懒人的存在而不断发展,对于这句话我不置可否。不过科技的不断进步确实让很多原本很复杂、无趣的事情变得简单、有趣。十几年前的驾驶员听到要开长距离的高速时,多半都会心中一紧,有经验的老司机会开始琢磨穿个合脚的鞋。现在,长途驾驶在自适应巡航的帮助下,已经解放了部分驾驶员的双脚。那么这个能自动达到预设时速并保持预设跟车距离的家伙,是如何做到这一切的?为什么有时候开启自适应巡航进入弯道会突然加速或减速呢?
在解答上面的问题前,首先需要明白自适应巡航的结构是什么样的、它的判断逻辑是什么。明白了结构与原理后,解决实际应用问题会轻而易举。
自适应巡航是什么?它与定速巡航有区别吗?
首先要肯定的是自适应巡航与定速巡航是有区别的。科技的发展帮助越来越多的车装配上定速巡航系统,自适应巡航则是基于定速巡航对于速度的控制,进一步实现对于距离的把握。简单讲,定速巡航要做的只有一件事,那就是达到驾驶员预设的时速要求,而自适应巡航除了达到预设时速外,它还肩负着保持预设跟车距离以及随着车距变化自动加速与减速的任务。
自适应巡航的历史
自适应巡航系统的历史可以追溯至上个世纪70年代。1971年,美国EATON(伊顿)公司便已从事这方面的开发。其雏形是日本三菱公司提出的PDC(Preview Distance Control)系统,它将雷达与其他处理器结合在一起,可以侦测出车距变化,并对驾驶员发出警告,系统还可以控制节气门开度调节发动机功率。此后丰田、本田、通用、福特、戴姆勒、博世等公司也投入到了研发行列。
自适应巡航的结构
总的来讲,自适应巡航系统由传感器、数字信号处理器以及控制模块三大部分组成。如果用人类做比喻,传感器就类似于眼睛、耳朵、鼻子等器官,它负责感知前车以及本车确切位置,目前市场上常见的传感器有雷达传感器、红外光束以及视频摄像头等几种。信号处理器负责将传感器接收到的信息进行数字处理,最后由控制模块处理收集到的信息进行控制。系统判断需要减速时,最终由ABS系统对车轮实施制动或者变速箱采用降挡的办法,将车速降低。
传感器安装位置
目前市面上传感器主要包括雷达传感器、红外光束传感器以及视频摄像头三种。品牌、车型不同其安装位置也不同,常见的安装位置有车标后、保险杠两侧、下方以及车内后视镜背后。造成这些差异的原因主要是各种传感器工作原理不同,当然其中也包含部分成本因素。
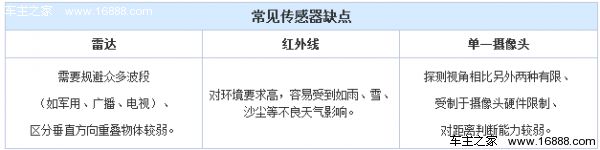
由于每种传感器都有自己的弱点,所以目前自适应巡航系统开发过程中,研发人员便会根据各种传感器的特点,将它们组成搭档,共同为数字信号处理器提供信息。比如雷达对于垂直方向上重叠物体的判断较弱。在实际行车中,当车辆行驶到立交桥附近时,如果前方与盘桥匝道上同时出现车辆,雷达传感器有很低几率出现误判;前方路面出现金属标识牌甚至是金属废弃物时,雷达传感器也有很低几率产生误判。相信没人想拿自己的生命做赌注,于是为了进一步降低误判的可能,越来越多的自适应巡航系统采用两种传感器收集信息。
难道这些传感器除了搭档合作为数字信号器提供信息外,就没有其他解决办法了?当然不是。比如单一摄像头受到硬件限制较大,对于距离判断能力较弱,那两个摄像头对距离判断效果又如何呢?在刚刚结束的东京车展上,搭载双摄像头传感器的车型出现在了斯巴鲁展台上,相信工程人员已经能让它满足实际使用需求。
自适应巡航系统控制逻辑
本车时速、前车时速、前车与本车距离、旁边车道是否有车辆进入等等,这些都是自适应巡航这套系统的控制依据。简单讲,这套系统的控制逻辑就是利用传感器得到行车所用的一切信息,当发现前车减速或发现干扰本车行驶的新目标时,电控单元发送执行信号给发动机或制动系统,做出相关动作。如果发现前方没有车辆,则恢复设定车速,随后就是周而复始循环至您关闭功能。
这些内容只是控制逻辑中很少的一部分,现在越来越多配备自适应巡航的车辆可以控制跟车距离远近,那设置好的跟车距离是否会随着车速改变而变化?当后车的传感器无法识别前车时会发生什么?这些问题都是自适应巡航系统控制逻辑需要面对的问题,下一页的测试项目中,我们就以人肉体验的方式实践上述常会碰到的问题。 测试前请注意:自适应巡航不等于城市安全系统!
自适应巡航设计初衷是减轻驾驶员长途驾驶的疲劳,极为复杂的城市路况并不是它发挥作用的地方。虽然现在的自适应巡航系统具备了根据前车情况、根据路况减速,甚至是刹停的功能,不过其开发之初便是为了减少驾驶员高速行车疲劳度,而不是依据主动驾驶功能而开发。换言之,这套系统的减速与刹车停止功能判断逻辑并不是以应付城市中复杂的低速路况而研发的。请牢记:它只是减低高速行驶时的疲劳感,而非永久解放人双手的功能!
实测自适应巡航系统
如何开启自适应巡航?如何确定已开启自适应巡航?
这两个问题看似容易,其实不然。买车的时候或许十分看重是否有这项配置,不过真到了用车的时候几乎从未开启的大有人在。究其原因,不知道怎么辨别是否开启是其中的原因。由于厂家不同,具体的操作按钮有所区别。
开启自适应巡航系统比把大象塞入冰箱还简单,首先打开定速巡航系统,并设置好所需时速。第二步按下自适应巡航按钮,并选择跟车距离。第三步就是用余光快速检查下仪表盘,看看有无标志提示。确定没有问题后,就可以享受它带来的便利了。
自适应巡航系统会通过传感器扫面前方路面情况,在前方无车情况下,到达您预设时速。前方出现车辆,则按照您预设跟车距离行驶。如果前车速度比您预设速度低,则自适应巡航系统只会按照您预设距离行驶,如果前方车辆比您预设时速高,自适应巡航系统也不会“盲目跟进”,超过您的预设时速。总之,这套系统就是在保证距离的情况下,按照您设定的时速前进。
相比开启,自适应巡航的关闭则简单的多,只要您踩下制动踏板,自适应巡航系统就会自动解除,当然您也可以使用按键手动关闭。如果想要再次激活,您只需按下调节车速按键。
城市路况中使用自适应巡航会遇到的问题
目前很多自适应巡航都可以设置不同远近的跟车距离,根据测试,不同时速下相同档位的跟车距离是不同的,这是因为车辆时速越快,需要刹停的距离就越长,比如100km/h时速下,最近跟车档位远比50km/h时速下设置的最近跟车挡位远。
如果在城市道路行驶时使用自适应巡航功能,即便将跟车距离调至最近档位,本车与前车之间的距离仍会十分宽敞,足够旁边车道车辆自由并线。在城市路况中,想通过设置最近跟车距离而不被旁边车道车辆乱并线的朋友,你们要失望了。
日常行车时为什么车辆会突然加速或减速?
在日常行车时,开启自适应巡航的车辆为什么有时候会突然加速或减速?这是因为在前方无车的情况下,即便是开启自适应巡航功能,车辆也只是执行定速巡航功能,在这种情况下,当发生以下情况时,车辆有可能在自适应巡航控制下自动减速。
★ 旁边车道车辆并入本车车道试验
首先进行旁边车道车辆进入本车道的试验。可以看到在下图的①-④阶段,开启自适应巡航的车辆与进入本车道的车辆距离在逐渐缩小,很明显此时系统还是判断前方无车,所以它执行的是达到驾驶员预设时速的判断逻辑。当⑤时,也就是旁边车道车辆几乎整个车身并入本车道时,我们的车辆采取了减速。
★ 本车并入旁边车道试验
在第二个试验中,开启自适应巡航的车辆并入旁边车道,同样是①-④的阶段,即使本车并入旁边车道的车身面积不断增加,不过本车依旧判断前方为无车阶段,车距在不断接近。图⑤的阶段系统已经判断到与前车距离过近,图⑥阶段,本车已经在自适应巡航系统作用下完成减速,与前车保持设置的跟车距离。
前车进入大角度的弯道,开启自适应巡航的本车会如何?
在开启自适应巡航功能并处于跟车状态下,当前车进入弯道后,开启自适应巡航系统的后车会采取什么措施呢?这会分为两种情况,第一种情况:传感器扫描不到前车,即会执行到达预设时速的逻辑。第二种情况:此时正好旁边车道有车拐弯,传感器会将其误认为是本车道前车,此时会判断为跟车距离不够,就会对车辆实施减速。
直线行驶时,自适应巡航也会“突然”加速?
在直线行驶开启自适应巡航时,前车并入其他车道,这时本车雷达会重新扫描前方车辆,如果判断没有前车则自适应巡航会执行驾驶员设定的目标时速,如果判断有前车存在,则自适应巡航执行驾驶员设定的行驶。特别是时速不高调整跟车距离的过程中,这种加速感就会比较明显。
自适应巡航的未来
随着科技的发展,自适应巡航系统也在不断进化。多传感器协同合作、判断逻辑更加智能将帮助自适应巡航系统更“聪明”。譬如部分奥迪车型搭载的自适应巡航系统,在车辆进入弯道时,处理模块将传感器收集到的信息与车道保持系统收集到的信息一同判断,规划出车辆的行驶轨迹。这样就可以扫描到前面转弯的车辆,避免突然加速或减速的情况。
让我们将眼光再放长远一点,自适应巡航的未来将不仅只在高速行驶时减轻驾驶员的疲劳。如果能将城市安全系统、自适应巡航系统、地图导航等系统进行有效结合,那么,距离实现自动驾驶也就不远了。
全文总结
我十分喜欢“科技发展的最高境界就是让人感觉不到科技的存在”这句话,若干年前,在实验场里实现自适应巡航的实验车还背负着巨大的传感器,车内还布置着众多线束。很难想象到若干年后的今天它们可以如此贴近我们的生活。今年的8月全新一代奔驰S级已经依靠自动驾驶功能从斯图加特行驶到了法兰克福,这次谁也不会怀疑它不久后就会走入我们的生活。虽然这些科技给人们带来越来越多的便利,不过现阶段看,保证行车安全性最重要的仍是操作者自身。
-
 Scofield189
2018-12-27
0 回复 举报南京瑞维尔电子技术有限公司从2013年起,多型号77G毫米波雷达已经在安防、智慧交通、城市轨道交通、障碍物探测、汽车制动刹车、防灾减灾、无线测距、安防车库车辆进出监测、无人机避撞、无人船避撞导航、两客一危、重要场所安防(油库、油田、输油管、石化、矿山、钢厂)等领域使用多年 收起回复
Scofield189
2018-12-27
0 回复 举报南京瑞维尔电子技术有限公司从2013年起,多型号77G毫米波雷达已经在安防、智慧交通、城市轨道交通、障碍物探测、汽车制动刹车、防灾减灾、无线测距、安防车库车辆进出监测、无人机避撞、无人船避撞导航、两客一危、重要场所安防(油库、油田、输油管、石化、矿山、钢厂)等领域使用多年 收起回复
-
谈谈ACC自适应巡航技术的优缺点2016-11-15 16737
-
请问怎么用单片机实现定速巡航?2020-03-18 1458
-
客车用定速巡航系统2009-07-27 867
-
什么是汽车自适应巡航控制系统2010-03-17 3787
-
详细剖析ACC自适应巡航系统2017-12-26 31952
-
详细介绍凯迪拉克超级巡航系统2018-02-01 9399
-
奔驰车定速巡航失控狂奔百公里2018-04-13 1335
-
一文读懂自适应巡航系统2018-06-20 6341
-
ACC自适应巡航技术——自动驾驶2018-10-13 8180
-
自适应巡航是什么2019-01-12 36249
-
ACC自适应巡航控制系统介绍2019-02-21 6956
-
汽车自适应巡航控制系统(ACC)技术详解2023-01-30 4928
-
自适应巡航控制系统的工作原理及应用2023-03-27 4350
-
汽车定速巡航怎么使用2023-07-03 1382
-
自适应巡航系统的组成及原理2023-11-01 2429
全部0条评论

快来发表一下你的评论吧 !
