

基于ARM处理器的汽车尾气遥测仪
嵌入式设计应用
描述
一种以ARM处理器为核心的汽车尾气遥测仪的设计。对该遥测仪的工作原理、系统设计与嵌入式软硬件实现作了较详细的分析。实践表明,该系统在性价比、响应速度、可携带性及功耗等方面均有明显优势。
汽车行驶时排出的大量有害废气是污染大气环境的主要流动污染源,占城市大气污染的50%~80%。汽车尾气监测是大气污染监测的重要组成部分。目前应用的监测方法中,以气体吸收光谱为理论背景的检测手段应用最多。其主要过程是:将可调谐激光二极管激光(TDL)的发射波长调整至被测气体某一吸收谱线,激光经过气体时被部分吸收,通过检测光强的变化,即可计算出气体的浓度。采用可调谐激光二极管气体吸收光谱学(TDLAS)监测技术的优点是:能快速扫描各种目标气体浓度,实现实时快速非接触多种气体的自动监测;灵敏度高,选取较强的吸收谱线,可以测出低于1ppb的浓度;遥感测量距离可以从几米到数公里,无需多点采样,就可以测出一个区域的平均污染程度;寿命长,无耗材,系统易于更新维护。激光检测可以极大提高尾气监测工作效率,快速获取城市机动车尾气排放数据,为政府决策提供依据。
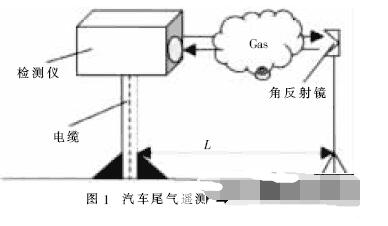
TDLAS因具有上述优点而得到了广泛的应用。近几年,TDLAS检测系统向低成本、低功耗、体积小的方向发展,将原有的基于工业控制计算机的遥测系统转变为便携式是目前应用的迫切需求。在改造机型的过程中,本文提出一种基于ARM处理器的CO和CO2遥测仪,其使用方便、体积小、功耗低,适合室外无人值守使用。汽车尾气遥测仪如图1所示。
1 二次谐波测量原理
简单地用检测光强变化测量气体浓度,会因为其他气体、尘埃的吸收而受到干扰。在实践中,更多地运用二次谐波测量法。
1.1 接收信号中的频谱
二次谐波光谱检测气体的方法,可以排除很强的干扰信号,且所得检测的污染物浓度与二次谐波的信号成正比。对发射激光进行频率为f的信号调制,经被测气体后,气体产生非线性吸收,在所接收光强信号中(经傅立叶变换)有以下表达式成立:
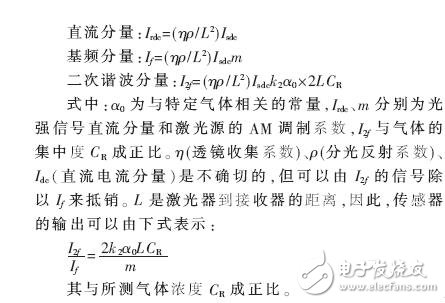
1.2 基频及二次谐波信号的提取
用锁相放大器能够提取上述信号,其原理如图2所示。
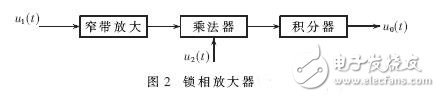
图2中u1(t)是激光光电转换器输出的信号,若输入u2(t)是本地正弦调制信号,频率为f,则经过锁相放大器后的输出u0(t)为基频分量If;若u2(t)是本地正弦调制信号的二倍频,即频率为2f,则经过锁相放大器后的输出u0(t)为二次谐波分量I2f。证明如下:
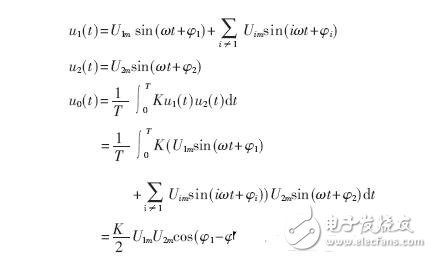
其中:K(系统增益)、cos(φ1-φ2)、U2m(参考信号幅值)均为固定值。显然,锁定放大器输出一个与被测信号幅值U1m成正比的直流电压,同时抑制了绝大部分的噪声。
2 系统构建
依据上述理论设计了以ARM处理器为核心的硬件电路,如图3所示。
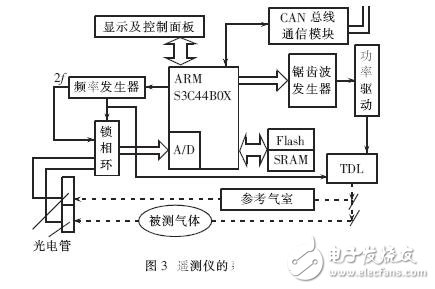
2.1 系统硬件设计
在硬件结构上,系统分为激光调制电路、模拟信号采集、数据处理单元、通信等模块。
2.1.1 激光调制电路
为了扫描CO和CO2的吸收谱线,需对TDL的波长进行调节(CO检测波长为1579.737nm,取邻近的1579.574nm作为CO2的检测工作波长)。
TDL激光器有温度调节、电流调节两种主要的波长调节方法。本设计的电流调节相对于温度调节具有线性好、可调节性好、扫描速度快的特点,因此采用室温温度调制TDL注入电流的方案。在室温变化的范围内,始终以参考气室给出的最大信号为准,避免了温度造成的影响。调制电流分为两个阶段:(1)直流电被调制成锯齿形电流,用于扫描CO和CO2的吸收谱线;(2)在锯齿波电流的基础上再叠加波谱调频。如图4所示。
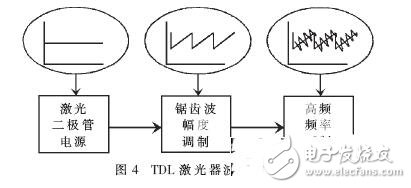
此电流注入TDL转化为被调制激光输出,激光经过被测气体,经反射镜被透镜收集在InGaAs PIN光电管位置上(如图1)。光电管把接收到的携带气体浓度等信息的光信号转换为电信号。后继信号经锁相放大、防混叠滤波、A/D转换、数字信号处理,分别解读出CO、CO2的浓度信息。
2.1.2 模拟信号采集
为了获得极强的抗噪声性能和极高的放大倍数,模拟电路主要由起频率选择放大功能的锁相环组成,参考频率分别为f=5Hz和2f=10kHz。锁相放大器电路采用互相关检测设计,由一个乘法器与一个低通滤波器组成(低通滤波器相当于积分器),它直接测出淹没在噪声中的调幅信号,输出一个与被测信号成正比的直流电压,相敏检波器采用高精度同步解调器AD630。在电路中,AD630相当于模拟乘法器,将谐波信号与参考信号相乘,从含有噪声的调幅波中精密检出被调制的信号。
系统使用两路锁相放大器,如前所述,分别检测基频分量获取二次谐波信号。2f信号在吸收中心具有最大值,需将调制频率锁定到吸收峰处以获得最大的灵敏度。这可由调节锯齿波偏置电流实现,反馈通过参考气体室光路的信号采集实现(参考气室气体由20% CO、20%CO2和60%N2组成,当参考信号最大时开始检测,以达到更高的灵敏度)。
2.1.3 数据处理单元
中央处理单元采用基于ARM7TDMI-S内核的低功耗ARM处理器S3C44B0X,它是三星公司专为手持设备和一般应用提供的高性价比的微控制器解决方案。S3C44B0X具有ARM处理器的所有优点:低功耗、高性能;同时又具有丰富的片上资源,非常适合嵌入式产品的开发。它支持软件使能休眠模式,适合以电池为电源的设备。内部集成了8路10位的A/D控制器,可以精确测出传感器的信号,在本系统中分别应用于锁相放大器1、2的Pf、P2f信号、温度检测、触模屏输出及电源电压检测。
S3C44B0X集成了LCD控制器,可以将显示缓存中的数据传送到外部的LCD驱动电路中。本设计支持单色4级灰度、320×240分辨率的SYM320240C显示,并且通过S3C44B0X RS-232串口接无线收发模块与上位机通信。使用该处理器众多功能模块使得本系统结构紧凑,减少了系统的复杂度。
2.1.4 通信模块
由于汽车尾气检测场地一般选择在边远郊区,在汽车发动机电磁干扰下,无线发射设备通常不能满足要求,所以使用CAN总线与上位机通信,将实时采集的数据传送到数据中心。CAN总线是现场总线中的应用热点,其通信速率高、开放性好、通信距离长(10km),具有多主站运行和分散仲裁的串行总线以及广播通信的特点。另外,采用CAN总线是因为其他汽车尾气检测模块,如牌照识别、速度、加速度测量等均使用CAN与上位机通信。
2.2 操作系统与应用程序
由于本系统应用尚处于完善阶段,任务多、实时性要求高,且硬件配置有所限制,在比较当前流行的实时操作系统的硬件需求、资源获取难易程度后,选用了嵌入式实时多任务操作系统μC/OS-II及图形界面μC/GUI。μC/OS-II是一个源代码公开、可移植、可固化、可剪裁、占先式的实时多任务操作系统。其绝大部分源代码是用ANSIC编写,可读性强、移植方便、运行稳定可靠。μC/GUI具有完善的图形函数库和窗口管理功能、可移植性好、占用RAM和ROM的空间小等诸多优点,非常适合嵌入式系统的应用。
应用程序由三个任务构成:
(1)TaskMeasureGas():汽车驶过后,立即检测气体浓度。将此任务作为一个最高优先级的任务运行,它的启动取决于TaskCANcom()提供的信号量。
(2)TaskCANcom():主要将测量结果送至上位机数据库中。当速度测量模块经CAN总线送出新数据时,它接收并启动TaskMeasureGas()。优先级较低。
(3)TaskuCGUI():显示刷新模块。它作为一个低优先级的任务运行。
此汽车尾气遥测仪以ARM处理器为核心,注重抗干扰设计,通过相对简单的系统结构实现高精度实时快速测量CO、CO2汽车气体的浓度。实践表明,定标后对这两种气体的测量精度达到10ppb级,完全可以代替基于工控机的尾气检测系统。适当改造结构后,此检测仪在环境污染气体监测、工业管道气体泄漏、煤气泄漏等方面有广泛的应用前景。
-
汽车尾气检测系统2013-02-26 6998
-
LABVIEW汽车尾气检测系统如何实现2013-03-21 2964
-
汽车尾气汽油味严重,一种电子加速器是如何处理?2016-11-05 2748
-
RFID汽车尾气检测系统比传统的汽车尾气检测好在哪里?2019-08-21 1743
-
汽车尾气分析仪有什么用途?2020-04-06 4117
-
氨气传感器在汽车尾气中检测中的作用是什么?2021-06-25 1964
-
浅谈汽车尾气污染和治理对策2009-12-28 920
-
虚拟仪器技术的汽车尾气检测系统2010-04-12 1872
-
移动式汽车尾气分析仪的设计应用2010-06-09 1703
-
汽车尾气发电研究进展2010-12-27 1151
-
汽车尾气采集系统软件设计2017-05-02 1206
-
基于ARM处理器S3C44BOX的尾气遥测仪2017-09-08 1150
-
汽车尾气检测系统的设计方案实例分析2017-10-17 2406
-
关于新型的汽车尾气自动检测仪的应用介绍2020-08-24 1123
-
汽车尾气余热回收系统的设计与应用2023-08-09 1334
全部0条评论

快来发表一下你的评论吧 !
